Патент на изобретение №2398253
|
||||||||||||||||||||||||||
(54) УСТРОЙСТВО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ С СУБДИФРАКЦИОННЫМ РАЗРЕШЕНИЕМ
(57) Реферат:
Изобретение относится к радиотехнике и может быть использовано в устройствах формирования изображения терагерцового диапазона, в сканирующих системах радиовидения. Устройство формирования изображения содержит средство фокусировки электромагнитного излучения для построения изображения, матрицу, выполненную в виде приемных элементов, расположенных в одной плоскости, средство для вращения, обеспечивающее одномерное сканирование изображения, устройство поворота изображения, которое связано со средством для вращения и которое установлено на выходе средства фокусировки электромагнитного излучения перед матрицей с возможностью сканирования изображения на матрице вокруг центра вращения изображения. Матрица приемных элементов выполнена двумерной, причем центр вращения изображения смещен относительно центра матрицы на расстояние е, не превышающее Rd, где Rd – эффективный радиус приемного элемента. Технический результат – улучшение разрешающей способности. 11 з.п. ф-лы, 15 ил.
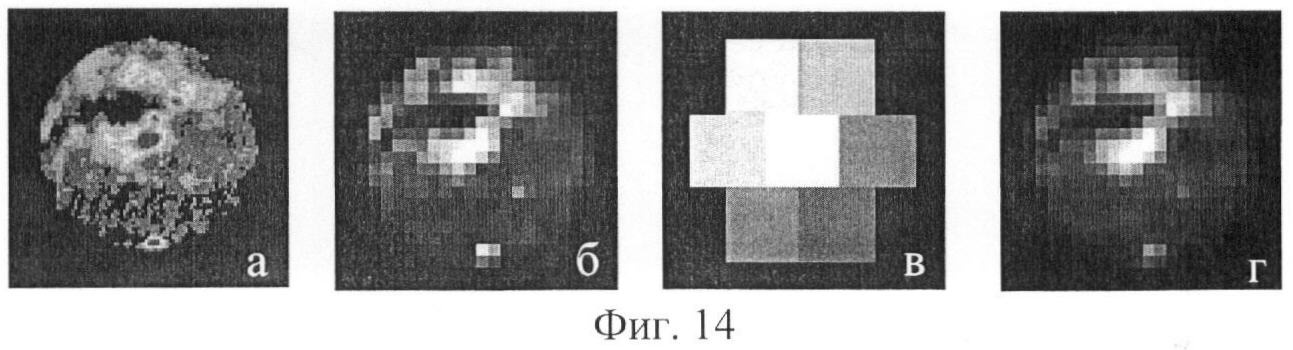
Изобретение относится к радиотехнике и может быть использовано в устройствах формирования изображения (УФИ) терагерцового диапазона, соответствующего частотам от 300 до 10000 ГГц, в сканирующих системах радиовидения. Предлагаемое УФИ относится к механическим сканирующим системам с одномерным сканированием, которые используются в тех случаях, когда быстродействие не является критическим параметром, например в радиоастрономии. В системах радиовидения сканирование позволяет сформировать поле изображения, в пределах которого производится измерение сигналов, пропорциональных интенсивности изображения. Эти сигналы запоминаются в памяти компьютера, обрабатываются и затем визуализируются. При этом возможна реализация различных способов сканирования и устройств формирования изображения. Устройства формирования изображения могут отличаться по типу приемного устройства. В простейшем варианте имеется один приемный элемент (ПЭ), характеризующий собой однопиксельную систему. Если в приемном устройстве используется совокупность ПЭ, то она представляет собой матричную систему (матрицу ПЭ). Матрицы приемных элементов (МПЭ) могут иметь разную структуру. Как правило, они представляют собой периодическую решетку ПЭ. Решетка МПЭ может быть одномерной или двумерной. Одномерная решетка называется также линейкой ПЭ. Среди двумерных решеток могут использоваться решетки с прямоугольными и гексагональнами сетками, в которых ПЭ расположены в узлах этих сеток. При этом для функционирования УФИ имеет значение также форма внешней границы матрицы. Например, решетка с прямоугольной сеткой может иметь форму прямоугольника или восьмиугольника. Точно также гексагональная сетка естественно порождает матрицы треугольной и шестиугольной формы УФИ отличаются по типу сканирования, которое может быть электронным или механическим. Достоинство электронного сканирования состоит в его быстродействии, которое позволяет формировать изображение в реальном масштабе времени, что наиболее существенно в специальных применениях. Однако системы электронного сканирования имеют чрезвычайно высокую стоимость. Наибольшее применение они получили в микроволновом диапазоне. В системах радиовидения используются УФИ с разными способами сканирования. Под способом сканирования понимается траектория, по которой движется приемное устройство в течение измерительного цикла. Часто движение совершает МПЭ или ПЭ относительно неподвижного изображения. Сканирование может быть одномерным и двумерным. В рамках одномерного сканирования ПЭ совершает линейное или круговое движение. При двумерном сканировании ПЭ совершает движение по сложной траектории, например по спирали или по зигзагообразной линии. Системы с двумерным сканированием имеют существенно большую стоимость, так как в этом случае при механическом движении ПЭ необходимо использовать, как минимум, два механических привода с электронным управлением, тогда как линейное сканирование требует одного привода, который в ряде случаев вообще не нуждается в управлении. Системы радиовидения и УФИ отличаются по способу обработки измеренных сигналов. Известно, что разрешающая способность УФИ ограничивается дифракционным размытием изображения, которое не позволяет сконцентрировать электромагнитное поле на площадке, имеющей размеры, существенно меньшие длины волны. Однако современные методы обработки изображений позволяют за счет увеличения числа измерений преодолеть дифракционный предел и получить изображение с размерами «пикселей» существенно меньшими, чем длина волны. Системы, использующие такие алгоритмы обработки сигналов, получили название систем с субдифракционным разрешением. В указанном УФИ спиральное сканирование осуществляется за счет вращения зеркала. В ходе вращения меняется также его угол наклона по отношению к оси вращения. В результате луч, отраженный от зеркала, описывает в пространстве спираль. Для реализации такого сканирования используются два синхронизированных механических привода. Большое время сканирования определяется большим отношением площади поля изображения к площади ПЭ. Этот недостаток также общий для всех однопиксельных систем. В матричных системах это отношение меньше за счет того, что площадь матрицы в N раз больше площади одного ПЭ, где TV – число элементов, входящих в матрицу. Недостатком известного устройства также является необходимость применения сложной механической сканирующей системы и большое время измерительного цикла, необходимое для формирования изображения. Эти недостатки являются общими для всех однопиксельных систем, так как построение изображения при использовании одиночного ПЭ невозможно без применения двумерного сканирования. Известно матричное УФИ с линейным сканированием (Патент РФ на полезную модель В этом техническом решении для сканирования используется плоское зеркало, совершающее вращательные движения вокруг оси вращения. В этом случае конец луча, отраженного от зеркала, движется вдоль линии. В качестве ПЭ в матрице используются фотоприемники. Известно также выполнение ПЭ из иммерсионной линзы и двух скрещенных пар щелевых антенн с подключенными к ним сверхпроводниковыми болометрами (S.V.Shitov, А.N.Vystavkin, A design analysis of imaging radiometer with antenna-coupled transition-edge sensors, Nuclear Instruments and Methods in Physics Research Section A: V.559, 2006, No. 2, pp.503-505). Ограничением УФИ по патенту РФ на полезную модель Для реализации субдифракционного разрешения необходимо создать равномерное распределение отсчетных точек по полю изображения. В этом случае разрешающая способность УФИ может быть повышена равномерно для всего изображения. Однако в этом известном УФИ возникают «мертвые зоны», в которых улучшение разрешающей способности практически невозможно. Наиболее близким техническим решением к предлагаемому устройству является устройство формирования изображения, содержащее средство фокусировки электромагнитного излучения для построения изображения – оптическую систему (ОС), матрицу, выполненную в виде приемных элементов, расположенных в одной плоскости, средство для вращения, обеспечивающее одномерное сканирование изображения, (Пирогов Ю.А., Гладун В.В., Тищенко Д.А., Тимановский А.Л., Шлемин И.В., Джен С.Ф. Сверхразрешение в системах радиовидения миллиметрового диапазона. «Журнал радиоэлектроники», В наиболее близком УФИ реализуется вращательное сканирование путем вращения линейной матрицы ПЭ, ориентированной вдоль радиальной линии. Недостатки данного устройства обусловлены применением линейной матрицы ПЭ. Распределение отсчетов при одномерном вращательном сканировании имеет тот же недостаток, что и для технического решения по патенту РФ на полезную модель Ограничением известного УФИ является недостаточная разрешающая способность. Дополнительным недостатком известного УФИ является необходимость непосредственного вращения МПЭ, что является существенным конструктивным неудобством. Наиболее ярко оно проявляется в УФИ, использующих охлаждаемые ПЭ, например, которые должны располагаться внутри криостата с ограниченным объемом. Размещение внутри криостата вращающейся МПЭ вместе с механическими приводами или герметизация наружного механического привода представляют собой сложную техническую задачу. Решаемая изобретением задача – повышение качества изображения. Технический результат, который может быть получен при выполнении заявленного устройства – улучшение разрешающей способности и упрощение устройства. Для решения поставленной задачи с достижением указанного технического результата в известном устройстве формирования изображения, содержащем средство фокусировки электромагнитного излучения для построения изображения, матрицу, выполненную в виде приемных элементов, расположенных в одной плоскости, средство для вращения, обеспечивающее одномерное сканирование изображения, согласно изобретению матрица приемных элементов выполнена двумерной, введено устройство поворота изображения, которое связано со средством для вращения и которое установлено на выходе средства фокусировки электромагнитного излучения перед матрицей с возможностью сканирования изображения на матрице вокруг центра вращения, причем центр вращения изображения смещен относительно центра матрицы на расстояние е, не превышающее Rd, где Rd – эффективный радиус приемного элемента. Возможны дополнительные варианты выполнения устройства, в которых целесообразно, чтобы: – приемные элементы были выполнены в виде элементов – фотоприемников; – приемные элементы были выполнены в виде элементов, каждый из которых состоит из иммерсионной линзы и двух скрещенных пар щелевых антенн с подключенными к ним сверхпроводниковыми болометрами; – внешняя граница матрицы была приближена к окружности; – приемные элементы матрицы были расположены в узлах гексагональной сетки, а внешняя граница матрицы имела форму шестиугольника; – приемные элементы матрицы были расположены в узлах квадратной сетки, а внешняя граница матрицы имела форму восьмиугольника; – устройство поворота изображения было выполнено в виде К-зеркала, связанного со средством его вращения; – упомянутое расстояние е было выбрано в пределах 0,2÷0,5 Rd; – средство фокусировки электромагнитного излучения было выполнено в виде телескопа; – был введен криостат, а матрица неподвижно установлена в нем; – устройство поворота изображения было выполнено в виде двухзеркальной антенны Кассегрена, у которой вспомогательное зеркало – вращающееся. Указанные преимущества, а также особенности настоящего изобретения поясняются лучшими вариантами его выполнения со ссылками на прилагаемые фигуры. Фиг.1 изображает упрощенную функциональную схему заявленного устройства для формирования изображения. Фиг.2 схематично показывает приемный элемент, выполненный на основе иммерсионной линзы. Фиг.3 – МПЭ с ее внешней границей, приближенной к окружности, с гексагональной сеткой. Фиг.4 – МПЭ с расположением ПЭ на гексагональной сетке, то же, что фиг.3, другой вариант. Фиг.5 – МПЭ с расположением элементов на квадратной сетке. Фиг.6 – распределение отсчетов измерений – центров ПЭ, которое получается в результате сканирования в Патенте РФ Фиг.7 – распределение отсчетов измерений – центров ПЭ, которое получается в результате сканирования в ближайшем аналоге (Пирогов Ю.А. и др.). Фиг.8 – распределение отсчетов измерений – центров ПЭ, которое получается в результате сканирования в заявленном устройстве. Фиг.9 – изображение Марса, полученное с помощью радиолокационной системы, Goldstone-VLA. Фиг.10 – схема сканирования. Фиг.11 – общая оптическая схема телескопа БТА. Фиг.12 – аппаратная функция средства фокусировки электромагнитного излучения для построения изображения – телескопа БТА. Фиг.13 – схема хода лучей с выхода телескопа до МПЭ (один из вариантов выполнения). Фиг.14 – изображение Марса, где а – исходное изображение, б – результат прямого измерения излучения наблюдаемого объекта с помощью матрицы из семи ПЭ, в – реконструированное изображение после сканирования. Фиг.15 – двухзеркальная антенна типа Кассегрена с вращающимся вспомогательным зеркалом. Устройство формирования изображения (фиг.1) содержит средство 1 фокусировки электромагнитного излучения для построения изображения – оптическую систему (ОС), матрицу 2, выполненную в виде приемных элементов 3 (ПЭ), расположенных в одной плоскости, и средство 4 для вращения, обеспечивающее одномерное сканирование изображения. Матрица 2 приемных элементов (МПЭ) выполнена двумерной (и может быть выполнена периодической). Введено устройство 5 поворота изображения (УПИ), связанное со средством 4. УПИ 5 установлено на выходе средства 1 перед матрицей 2 с возможностью сканирования изображения на матрице 2 вокруг центра вращения изображения. Центр вращения изображения смещен относительно центра матрицы 2 на расстояние е, не превышающее Rd, где Rd – эффективный радиус приемного элемента 3. В отличие от ближайшего аналога средство 4 для вращения связано с УПИ 5, а не с матрицей 2. ПЭ 3 могут быть выполнены в виде фотоприемников. Приемный элемент 3 может быть выполнен из иммерсионной линзы и скрещенных двух пар щелевых антенн с подключенными к ним сверхпроводниковыми болометрами (фиг.2). Выполнение ПЭ 3 указанным образом с использованием иммерсионной линзы позволяет одновременно принимать сигналы двух ортогональных поляризаций, что создает возможность дополнительного увеличения разрешающей способности УФИ за счет учета поляризационной структуры изображения. Внешняя граница матрицы 2 может быть приближена к окружности (фиг.3). Приемные элементы 3 матрицы 2 целесообразно располагать в узлах гексагональной сетки, а внешняя граница матрицы 2 в этом случае может иметь форму шестиугольника (фиг.4) ПЭ 3 матрицы 2 целесообразно располагать в узлах квадратной сетки, а внешняя граница матрицы 2 в этом случае может иметь форму восьмиугольника (фиг.5). Устройство 5 поворота изображения может быть выполнено из К-зеркала, связанного со средством 4 его вращения (фиг.1, 12). На фиг.12 средство 4 (привод) для простоты чтения схемы не показан. Расстояние е может быть выбрано в пределах 0,2÷0,5 Rd. Средство 1 фокусировки электромагнитного излучения для построения изображения может быть выполнено в виде телескопа (фиг.11). В УФИ может быть введен криостат 6, а матрица 2 неподвижно установлена в нем (фиг.13). Устройство 5 поворота изображения может быть выполнено в виде двухзеркальной антенны Кассегрена, у которой продольная ось главного зеркала 19 смещена на расстояние е относительно центра матрицы 2, а вспомогательное зеркало 20 выполнено вращающимся (фиг.15). Работает УФИ следующим образом (фиг.1). Излучение в свободном пространстве может быть представлено в виде совокупности лучей, распространяющихся под разными направлениями. Направление распространения характеризуется двумя углами Для получения непрерывного изображения приемные элементы 3 матрицы 2 расположены в узлах сетки плотно, так, что граница одного ПЭ 3 соприкасается с границей соседнего. На фиг.3, 4 показаны примеры МПЭ с гексагональной сеткой. На фиг.5 – с квадратной сеткой. Увеличение площади реконструируемого изображения и повышение разрешающей способности зависит от количества ПЭ 3 – N. В то же время увеличение площади реконструируемого изображения находится в противоречии с повышением разрешающей способности. Как показали исследования, если поставить цель достижения технического результата – повышение разрешающей способности, то необходимо максимально приблизить площадь реконструируемого изображения к площади МПЭ, при этом центр изображения должен быть смещен относительно центра матрицы 2 на расстояние е, не превышающее Rd, где где Rd – эффективный радиус приемного элемента 3. (Или Rd – половина периода матрицы, которая при плотном размещении ПЭ 3 совпадает с радиусом ПЭ 3 (фиг.1, 10). Для сохранения площади изображения форма внешней границы МПЭ должна быть максимально приближена к окружности О, что достигается расположением ПЭ 3, как показано на фиг.3-5. В то же время повышение разрешающей способности достигается за счет введения УПИ 5, установленном на выходе средства 1 фокусировки электромагнитного излучения перед матрицей 2 с возможностью сканирования изображения на матрице 2 вокруг центра вращения (фиг.1, 10, 12). Действительно, в УФИ (патент РФ Распределение на фиг.6 построено для матрицы 3×3 ПЭ 3. Движение матрицы 2 происходит вдоль горизонтальной оси. Хорошо видно, что отсчетные точки концентрируются по полю изображения вдоль линий. При этом для реализации субдифракционного разрешения необходимо создать равномерное распределение отсчетных точек по всему полю изображения. Однако возникают «мертвые зоны», в которых улучшение разрешающей способности невозможно. В ближайшем же аналоге применена линейная матрица 2 ПЭ 3. Распределение отсчетов при одномерном вращательном сканировании показано на фиг.7. Это распределение имеет тот же недостаток, что и показанное на фиг.6. Для него характерно появление «мертвых зон», в которых невозможно улучшение разрешающей способности УФИ. Кроме того, отсчеты на разных кольцевых линиях расположены неравномерно. Их плотность убывает пропорционально радиусу. В заявленном техническом решении использована двумерная матрица 2 с ПЭ 3 (фиг.3-5) и одномерное вращательное сканирование. Правильный выбор центра вращения с е Распределение на фиг.8 получено для квадратной матрицы размером 4×4. Из фиг.8 видно, что заявленное устройство создает существенно более равномерное распределение отсчетов при использовании исключительно одномерного вращательного сканирования, которое в реализации значительно проще других видов сканирования, в том числе одномерных. Как показали исследования, если расстояние е выбрано в пределах 0,2÷0,5 Rd, то удается получить еще более равномерное распределение отсчетов, чем показанное на фиг.8. Другое преимущество заявленного УФИ состоит в том, что матрица 2 в нем остается неподвижной (фиг.1, 14). Вращается изображение за счет использования УПИ 5 (фиг.1, 15) и его средства 4 вращения. При этом матрица 2 может располагаться внутри криостата 6 (фиг.13) неподвижно, что повышает чувствительность системы, уменьшая собственные шумы ПЭ 3. В отличие от ближайшего аналога в заявленном техническом решении (фиг.1) изображение, формируемое средством 1, вращается с помощью устройства поворота изображения 5 (К-зеркала и средства 4), устанавливаемого на выходе средства 1 перед матрицей 2, с небольшим сдвигом e относительно центра матрицы 2 в общей плоскости изображения и матрицы 2. Регистрируются сигналы, принимаемые всеми ПЭ 3, для каждого угла поворота изображения. Число углов поворота N Зарегистрированные сигналы Pi( После алгебраизации интегральных уравнений получается система N Решение находится с применением алгебраических алгоритмов и процедуры регуляризации. Пример конкретного выполнения изобретения. Был разработан соответствующий алгоритм и промоделирована его работа на компьютере для матрицы 2 из семи ПЭ 3 (фиг.3, 10) применительно к изображению (фиг.9), получаемому в фокусе Несмита телескопа БТА (фиг.11). [ (Телескоп БТА)]. На фиг.11 показаны: главное оптическое зеркало 11, главный (первичный) фокус 12, субрефлектор 13, диаганальное зеркало 14 переброса пучка излучения, конструктивная труба 15, через которую пучок излучения поступает к фокусу Несмита II. балкон 16 фокуса Несмита II, где возможна установка приемной аппаратуры и размещение астрономов-наблюдателей. Характерные для телескопа БТА размеры даны на фиг.11 в метрах. Эти размеры необходимы для последующих пояснений. Отметим, что целесообразность такой конкретизации обусловлена тем, что конструктивные особенности БТА существенно влияют на способ формирования изображения и должны учитываться при его аппаратной и алгоритмической реализации. Для каждого ПЭ 3 при всех углах поворота В показанной схеме (фиг.11) прохождения волн от входа телескопа до приемника установить радиометр возможно лишь в фокусе Несмита II. Соответствующее эффективное фокусное расстояние составляет 184 м. При диаметре главного зеркала D=6 м и длине волны На фиг.10 показана схема вращения изображения на выходе телескопа относительно матрицы 2 приемных элементов 3 с эксцентриситетом е, составляющим порядка (0,2-0,5) радиуса Rd (фиг.2). Вращение изображения относительно матрицы 2 приемных элементов 3, что эквивалентно вращению матрицы 2 относительно изображения, в их общей плоскости может осуществляться с помощью УПИ 5 – вращателя изображения на основе К-зеркала (фиг.13). На фиг.13 также показаны: зеркало 17 и зеркало 18. Эти два внеосевых параболических зеркала обеспечивают ввод излучения в криостат 6 и фокусировку излучения на матрице 2 приемных элементов 3. Интегральные уравнения, составляющие систему уравнений, о которой говорилось ранее, имеют вид:
где S – область, в которой строится изображение, Gi(x,y) – аппаратная функция i-ого приемного элемента 3, Hi,j(х,у,х’,у’) – оптическая передаточная функция средства 1 на i-ый ПЭ 3 на j-ом шаге, pi,j – сигнал с выхода i-ого ПЭ 3 на j-ом шаге. Область S близка к области, занятой матрицей 2. В уравнениях (1) f(x,у) – функция, описывающая идеальное изображение, которое не имеет искажений, вызванных дифракционным размытием, а также неидеальностью телескопа. Ее также молено себе представить как изображение, переданное от входа телескопа на плоскость перед матрицей 2 приемных элементов 3 идеальной оптической системой. Именно его требуется определить в результате решения системы уравнений. Отметим, что Hi,j – оптическая передаточная функция излучения от входа телескопа, дополненного УПИ 5 и двумя концентрирующими внеосевыми параболическими зеркалами 17 и 18 (фиг.13). Эта оптическая передаточная функция Hi,j учитывает также результат дифракции. Она определялась в ходе анализа прохождения излучения через оптическую систему, показанную на фиг.13. Указанный анализ был выполнен в приближении Гюйгенса-Кирхгофа. В качестве ПЭ 3 рассматривалась эллиптическая линза, в фокусе которой располагается двухщелевая антенна с включенным в нее болометром (фиг.2). Для приема двух поляризаций могут применяться две скрещенные антенны. Функция f(x,у) в соответствии с выбранной конфигурацией приемной матрицы задается в области S, которая в данном конкретном случае имеет форму круга радиусом R1=Rs+3Rd, где Процесс формирования регистрируемых данных можно представить следующим образом. Выполняется поворот изображения на угол Численное решение системы уравнений (1) основано на ее алгебраизации и переходу к системе линейных алгебраических уравнений. Для этого неизвестная функция f(x,y) представляется в виде суммы известных функций
Обычно в качестве функций
где Sk – область, занятая k-ым пикселем изображения, k=1, Введем вместо нумерации, характеризуемой двумя индексами i, j. одну общую нумерацию с общим индексом l=1,
Подставим соотношение (2) в (4) и получим систему линейных алгебраических уравнений относительно неизвестных коэффициентов Ak:
В силу неравенства:
система уравнений (5) является переопределенной системой. При выполнении равенства в (6) она превращается в определенную систему, которая имеет единственное решение. Увеличенное число уравнений можно эффективно использовать для повышения устойчивости решения. Для решения переопределенной системы (7) был применен метод регуляризации [А.Н.Тихонов, В.Я.Арсенин. Методы решения некорректных задач. Изд-во «Наука», М., 1986], обеспечивающий устойчивость решения к шумам измеренных данных. Систему (5) можно записать в компактной векторной форме:
Прямое решение векторного уравнения (7) заменяется решением задачи минимизации функционала
где С помощью компьютера и представленного выше алгоритма работы заявленного УФИ была произведена реконструкция изображения Марса (фиг.14). Результирующая сетка пикселей для реконструкции изображения выбрана с размерностью 24×24. Для приведенных изображений использовались следующие параметры численного моделирования: число углов поворота – 112, размерность матрицы реконструкции – 24×24, сдвиг центра вращения изображения относительно центра матрицы – 0,25 Rd ПЭ 3 (в данном случае радиуса иммерсионной линзы). Математическое моделирование показало, что это оптимальный сдвиг для минимизации погрешности реконструкции. Параметр регуляризации Сравнение полученных реконструированных изображений в результате процедуры моделирования с исходными и усредненными изображениями показало удовлетворительную работу заявленного УФИ. Это позволило сделать вывод о том, что заявленное устройство дает возможность получить субдифракционное разрешение почти в десять раз лучшее, чем разрешение при прямых измерениях с применением матрицы, размеры приемных элементов которой выбраны соответствующими дифракционному пятну телескопа. Наиболее успешно заявленное устройство формирования изображения промышленно применимо в сканирующих системах радиовидения для улучшения разрешающей способности с сохранением площади восстанавливаемого изображения и упрощения устройства.
Формула изобретения
1. Устройство формирования изображения, содержащее средство фокусировки электромагнитного излучения для построения изображения, матрицу, выполненную в виде приемных элементов, расположенных в одной плоскости, средство для вращения, обеспечивающее одномерное сканирование изображения, отличающееся тем, что матрица приемных элементов выполнена двумерной, введено устройство поворота изображения, которое связано со средством для вращения и которое установлено на выходе средства фокусировки электромагнитного излучения перед матрицей с возможностью сканирования изображения на матрице вокруг центра вращения изображения, причем центр вращения изображения смещен относительно центра матрицы на расстояние е, не превышающее Rd, где Rd – эффективный радиус приемного элемента. 2. Устройство по п.1, отличающееся тем, что приемные элементы выполнены в виде элементов – фотоприемников. 3. Устройство по п.1, отличающееся тем, что приемные элементы выполнены в виде элементов, каждый из которых состоит из иммерсионной линзы и скрещенных двух пар щелевых антенн с подключенными к ним сверхпроводниковыми болометрами. 4. Устройство по п.1, отличающееся тем, что внешняя граница матрицы приближена к окружности. 5. Устройство по п.1, отличающееся тем, что приемные элементы матрицы расположены в узлах гексагональной сетки, а внешняя граница матрицы имеет форму шестиугольника. 6. Устройство по п.1, отличающееся тем, что приемные элементы матрицы расположены в узлах квадратной сетки, а внешняя граница матрицы имеет форму восьмиугольника. 7. Устройство по п.1, отличающееся тем, что устройство поворота изображения выполнено из К-зеркала, связанного со средством его вращения. 8. Устройство по п.7, отличающееся тем, что расстояние е выбрано в пределах 0,2÷0,5 Rd. 9. Устройство по п.1, отличающееся тем, что средство фокусировки электромагнитного излучения выполнено в виде телескопа. 10. Устройство по п.1, отличающееся тем, что введен криостат, а матрица неподвижно установлена в нем. 11. Устройство по п.1, отличающееся тем, что устройство поворота изображения выполнено в виде двухзеркальной антенны Кассегрена, у которой вспомогательное зеркало выполнено вращающимся.
РИСУНКИ
|
||||||||||||||||||||||||||
 108
108
 ,
,  . Угол
. Угол  , где N – число ПЭ, Ns – линейная размерность матрицы реконструируемого изображения. На фиг.9, например, показано изображение Марса, полученное с помощью радиолокационной системы Goldstone-VLA. На фиг.10 – схема сканирования, где 0 – прямое измерение по центру матрицы 2 без сканирования, а 1
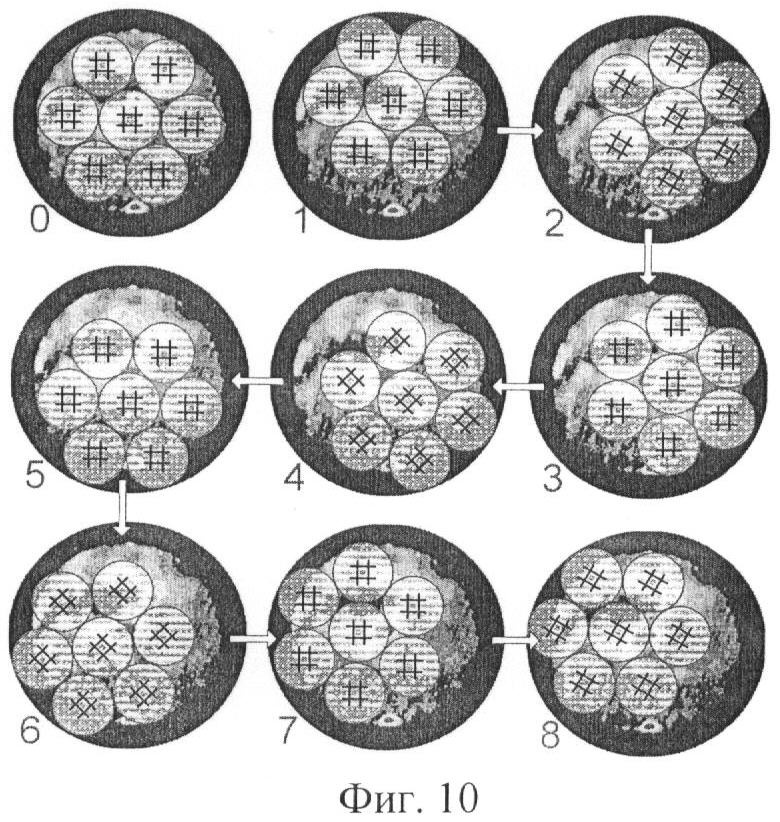
, где N – число ПЭ, Ns – линейная размерность матрицы реконструируемого изображения. На фиг.9, например, показано изображение Марса, полученное с помощью радиолокационной системы Goldstone-VLA. На фиг.10 – схема сканирования, где 0 – прямое измерение по центру матрицы 2 без сканирования, а 1 и т.д. – шаги сканирования со смещением центра вращения построения изображения относительно центра матрицы 2.
и т.д. – шаги сканирования со смещением центра вращения построения изображения относительно центра матрицы 2. . Получалась модель массива зарегистрированных данных. Далее решалась некорректная обратная задача реконструкции изображения на выбранной сетке дискретизации по рассчитанным модельным зарегистрированным данным с учетом рассчитанных передаточных функций оптической системы для каждого ПЭ 3. Сравнение изображений, полученных в результате реконструкции, с исходными и усредненными изображениями показало удовлетворительную работу устройства (фиг.13, 14). Это означает, что в рассматриваемом случае предложенное УФИ позволяет получить субдифракционное разрешение не менее чем в десять раз лучшее, чем разрешение при дифракционном ограничении, т.е. при прямом измерении с помощью матрицы 2, размеры приемных элементов 3 которой выбраны соответствующими дифракционному пятну телескопа.
. Получалась модель массива зарегистрированных данных. Далее решалась некорректная обратная задача реконструкции изображения на выбранной сетке дискретизации по рассчитанным модельным зарегистрированным данным с учетом рассчитанных передаточных функций оптической системы для каждого ПЭ 3. Сравнение изображений, полученных в результате реконструкции, с исходными и усредненными изображениями показало удовлетворительную работу устройства (фиг.13, 14). Это означает, что в рассматриваемом случае предложенное УФИ позволяет получить субдифракционное разрешение не менее чем в десять раз лучшее, чем разрешение при дифракционном ограничении, т.е. при прямом измерении с помощью матрицы 2, размеры приемных элементов 3 которой выбраны соответствующими дифракционному пятну телескопа. =1, 2 мм диаметр дифракционного пятна Эйри в фокусе Несмита составляет
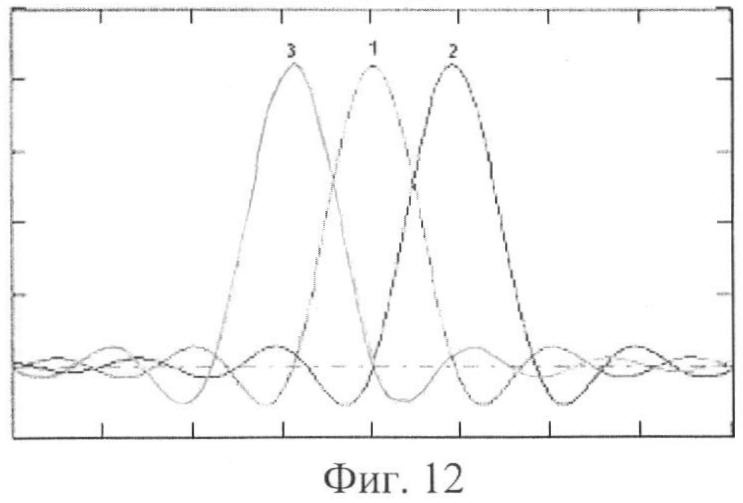
=1, 2 мм диаметр дифракционного пятна Эйри в фокусе Несмита составляет  В этом случае через трубу 15, имеющую диаметр 180 мм, проходят без существенных искажений лишь семь пучков излучения с сечением в форме гексагональной «ромашки». Соответственно этому выбрана и конфигурация матрицы 2 и размеры ее приемных элементов 3 (фиг.3, 10). Аппаратная функция телескопа БТА – распределение интенсивности поля излучения в трех пятнах Эйри, расположенных вдоль диаметра гексагональной «ромашки» на выходе из трубы 15, изображена на фиг.12.
В этом случае через трубу 15, имеющую диаметр 180 мм, проходят без существенных искажений лишь семь пучков излучения с сечением в форме гексагональной «ромашки». Соответственно этому выбрана и конфигурация матрицы 2 и размеры ее приемных элементов 3 (фиг.3, 10). Аппаратная функция телескопа БТА – распределение интенсивности поля излучения в трех пятнах Эйри, расположенных вдоль диаметра гексагональной «ромашки» на выходе из трубы 15, изображена на фиг.12.
 , xs и ys – координаты центра вращения изображения (центр смещен на расстояние e относительно центра матрицы), Rd – эффективный радиус одного ПЭ 3,
, xs и ys – координаты центра вращения изображения (центр смещен на расстояние e относительно центра матрицы), Rd – эффективный радиус одного ПЭ 3, 

 . Таким образом, согласно (3) интенсивность изображения в пределах одного пикселя считается постоянной.
. Таким образом, согласно (3) интенсивность изображения в пределах одного пикселя считается постоянной.


 :
:
 – заданный малый параметр. Минимизация функционала сводится к решению системы алгебраических уравнений относительно неизвестных компонент вектора А. Решение производится по методу LQ-разложения с применением регуляризации или с помощью алгебраических итерационных алгоритмов.
– заданный малый параметр. Минимизация функционала сводится к решению системы алгебраических уравнений относительно неизвестных компонент вектора А. Решение производится по методу LQ-разложения с применением регуляризации или с помощью алгебраических итерационных алгоритмов.