|
|
(21), (22) Заявка: 2009108767/11, 10.03.2009
(24) Дата начала отсчета срока действия патента:
10.03.2009
(46) Опубликовано: 20.06.2010
(56) Список документов, цитированных в отчете о
поиске:
RU 2308055 С2, 10.10.2007. RU 2107004 C1, 20.03.1998. JP 7167672 A, 04.07.1995. JP 2005181077 A, 07.07.2005.
Адрес для переписки:
690041, Приморский край, г.Владивосток, ул. Радио, 5, Институт автоматики и процессов управления ДВО РАН (ИАПУ ДВО РАН)
|
(72) Автор(ы):
Дорожко Вениамин Мефодьевич (RU)
(73) Патентообладатель(и):
Институт автоматики и процессов управления Дальневосточного отделения Российской академии наук (статус государственного учреждения) (ИАПУ ДВО РАН) (RU)
|
(54) СПОСОБ ДИСТАНЦИОННОЙ РЕГИСТРАЦИИ ПО РАДИОЛОКАЦИОННЫМ НАБЛЮДЕНИЯМ ВЫХОДА ГРЕБНОГО ВИНТА НА МАКСИМАЛЬНЫЕ ОБОРОТЫ ПРИ ЭКСТРЕННОМ РАЗГОНЕ МОРСКОГО СУДНА
(57) Реферат:
Изобретение относится к области управления движением морских судов и предназначено для дистанционной регистрации по радиолокационным наблюдениям выхода гребного винта на максимальные обороты при экстренном разгоне морского судна по двумерным (угол-расстояние) радиолокационным наблюдениям в интересах обеспечения безопасности морского движения с целью исключения столкновения встречных судов. Изобретение базируется на установленном физическом факте, согласно которому максимум линейного ускорения движения центра судна совпадает по времени с выходом гребного винта судна на максимальные обороты. Согласно заявленному способу сведения о принятом решении судоводителем на переход судна к экстренному разгону формируются в системе управления движением судов в результате постоянного радиолокационного наблюдения за линейным ускорением центра судна, определяемого усреднением координат двух максимально удаленных друг от друга локальных источников радиолокационных эхо-сигналов, выбранных из числа имеющихся на корме и носу судна. Локальные источники формируются разнообразными надпалубными конструкциями, обеспечивающими устойчивые радиолокационные эхо-сигналы. Наблюдение за линейным ускорением движения центра судна, максимум которого совпадает с выходом гребного винта судна на максимальные обороты, позволяет системе управления движением судов дистанционно зарегистрировать развитие винтом максимальных оборотов, т.е. зафиксировать на самой ранней стадии переход судна к экстренному разгону и принять своевременные и эффективные меры по предупреждению столкновения судов. 9 ил.
Текст описания приведен в факсимильном виде.                                      
Формула изобретения
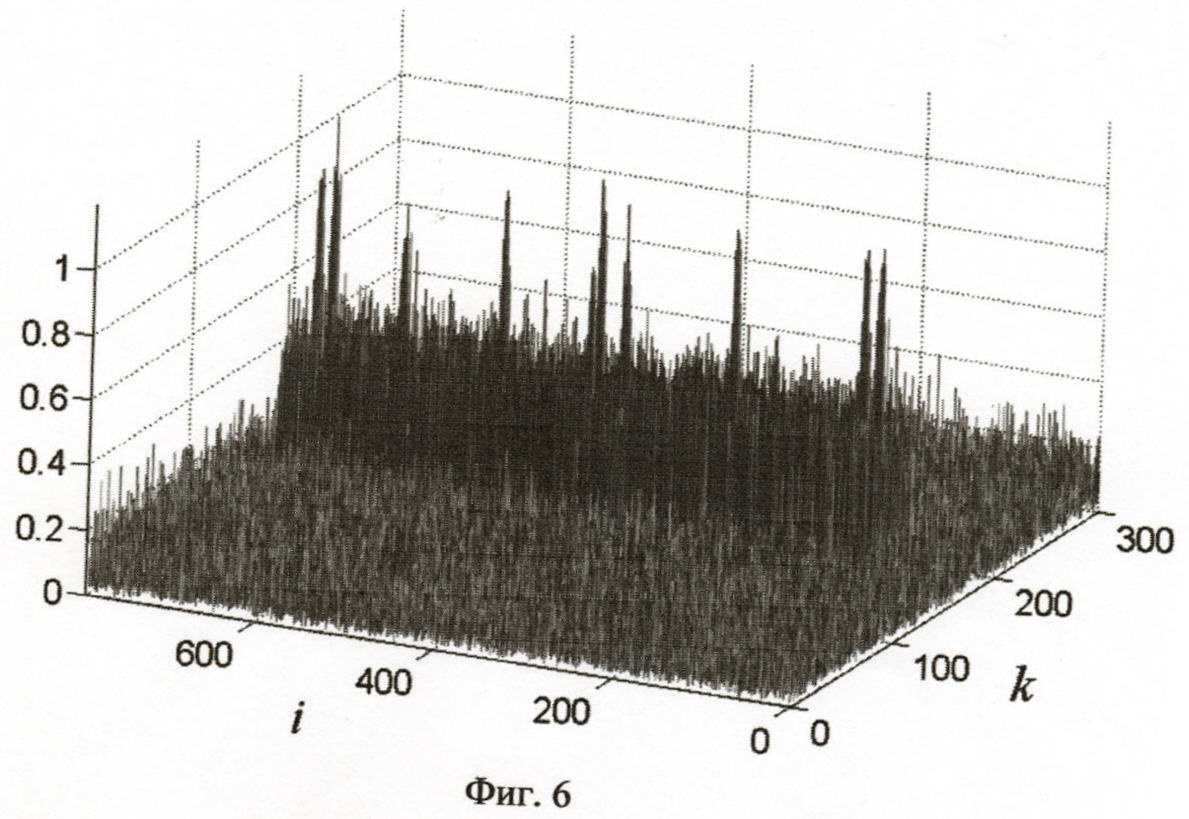
Способ дистанционной регистрации по радиолокационным наблюдениям выхода гребного винта на максимальные обороты при экстренном разгоне морского судна, заключающийся в том, что формируют матрицу, содержащую эхо-сигналы от корпуса морского судна, его локальных источников и поверхностного волнения моря, столбцы которой являются радиолокационными линейками наблюдения для каждого из угловых положений антенны, представляющих собой последовательность дискретных отсчетов эхо-сигналов, для каждой i-й линейки, где i=1, 2,  , q – номер линейки, получают биполярную матрицу вейвлет-спектров эхо-сигналов путем непрерывного вейвлет-преобразования столбцов матрицы эхо-сигналов; исключают элементы одноименной полярности, не содержащие вейвлет-спектров эхо-сигналов от корпуса судна, устанавливают значение порога биномизации, при котором размеры связных множеств биномизированных элементов вейвлет-спектров эхо-сигналов от поверхностного волнения меньше размеров двумерной матрицы морфологического фильтра, выполняют биномизацию матрицы вейвлет-спектров эхо-сигналов с помощью установленного порога биномизации, обеспечивающего исключение элементов вейвлет-спектров эхо-сигналов от взволнованной поверхности моря, с помощью указанного морфологического фильтра путем морфологической обработки сформированной биномизированной матрицы вейвлет-спектров получают вейвлет-спектры эхо-сигналов в виде однополярных импульсов, положение которых на каждой радиолокационной линейке наблюдения соответствует положению эхо-сигналов от отражающего элемента корпуса судна и которые образуют внешний контур корпуса морского судна, с помощью пирамидальных алгоритмов быстрого вейвлет-преобразования получают вейвлет-коэффициенты путем декомпозиции линеек матрицы эхо-сигналов поверхностного волнения вне контура судна, определяют значения порогов ограничения указанных вейвлет-коэффициентов, при которых сумма ограниченных вейвлет-коэффициентов от эхо-сигналов поверхностного волнения вне контура судна равна нулю, с помощью пирамидальных алгоритмов быстрого вейвлет-преобразования получают вейвлет-коэффициенты путем декомпозиции линеек матрицы эхо-сигналов внутри контура судна, ограничение которых выполняют с помощью упомянутых порогов, формируют биполярную матрицу вейвлет-спектров эхо-сигналов путем непрерывного вейвлет-преобразования каждой линейки, образованной суммированием указанных вейвлет-коэффициентов каждой линейки, и исключают из нее элементы одноименной полярности, не содержащие вейвлет-спектры эхо-сигналов от локальных источников, при этом указанные вейвлет-спектры эхо-сигналов от локальных источников в виде однополярных импульсов, положение которых на каждой радиолокационной линейке наблюдения соответствует положению эхо-сигналов от локальных источников, образуют контуры локальных источников, одновременно с формированием вышеупомянутой биполярной матрицы устанавливают число уровней декомпозиции быстрого вейвлет-преобразования, масштаб функции непрерывного вейвлет-преобразования и число суммируемых вейвлет-коэффициентов каждой линейки на последнем уровне декомпозиции, при которых отношение амплитуды элементов вейвлет-спектров от вейвлет-коэффициентов локальных источников к амплитуде элементов вейвлет-спектров от вейвлет-коэффициентов поверхностного волнения внутри контура судна достигает максимума, формируют последовательность матриц, содержащих эхо-сигналы от корпуса морского судна, его локальных источников и поверхностного волнения моря, в течение времени радиолокационного наблюдения за морским судном, на каждой матрице определяют координаты центральных элементов контуров двух максимально удаленных друг от друга локальных источников, выбранных из числа расположенных на корме и носу судна, отличающийся тем, что определяют координаты геометрического центра судна; определяют величины линейного смещения указанного центра за время между двумя смежными циклами сканирования антенны, формируют последовательность указанных смещений центра в течение времени наблюдения за судном, определяют линейное ускорение движения центра судна, временное положение максимума которого принимают в качестве основания для дистанционной регистрации выхода гребного винта на максимальные обороты. , q – номер линейки, получают биполярную матрицу вейвлет-спектров эхо-сигналов путем непрерывного вейвлет-преобразования столбцов матрицы эхо-сигналов; исключают элементы одноименной полярности, не содержащие вейвлет-спектров эхо-сигналов от корпуса судна, устанавливают значение порога биномизации, при котором размеры связных множеств биномизированных элементов вейвлет-спектров эхо-сигналов от поверхностного волнения меньше размеров двумерной матрицы морфологического фильтра, выполняют биномизацию матрицы вейвлет-спектров эхо-сигналов с помощью установленного порога биномизации, обеспечивающего исключение элементов вейвлет-спектров эхо-сигналов от взволнованной поверхности моря, с помощью указанного морфологического фильтра путем морфологической обработки сформированной биномизированной матрицы вейвлет-спектров получают вейвлет-спектры эхо-сигналов в виде однополярных импульсов, положение которых на каждой радиолокационной линейке наблюдения соответствует положению эхо-сигналов от отражающего элемента корпуса судна и которые образуют внешний контур корпуса морского судна, с помощью пирамидальных алгоритмов быстрого вейвлет-преобразования получают вейвлет-коэффициенты путем декомпозиции линеек матрицы эхо-сигналов поверхностного волнения вне контура судна, определяют значения порогов ограничения указанных вейвлет-коэффициентов, при которых сумма ограниченных вейвлет-коэффициентов от эхо-сигналов поверхностного волнения вне контура судна равна нулю, с помощью пирамидальных алгоритмов быстрого вейвлет-преобразования получают вейвлет-коэффициенты путем декомпозиции линеек матрицы эхо-сигналов внутри контура судна, ограничение которых выполняют с помощью упомянутых порогов, формируют биполярную матрицу вейвлет-спектров эхо-сигналов путем непрерывного вейвлет-преобразования каждой линейки, образованной суммированием указанных вейвлет-коэффициентов каждой линейки, и исключают из нее элементы одноименной полярности, не содержащие вейвлет-спектры эхо-сигналов от локальных источников, при этом указанные вейвлет-спектры эхо-сигналов от локальных источников в виде однополярных импульсов, положение которых на каждой радиолокационной линейке наблюдения соответствует положению эхо-сигналов от локальных источников, образуют контуры локальных источников, одновременно с формированием вышеупомянутой биполярной матрицы устанавливают число уровней декомпозиции быстрого вейвлет-преобразования, масштаб функции непрерывного вейвлет-преобразования и число суммируемых вейвлет-коэффициентов каждой линейки на последнем уровне декомпозиции, при которых отношение амплитуды элементов вейвлет-спектров от вейвлет-коэффициентов локальных источников к амплитуде элементов вейвлет-спектров от вейвлет-коэффициентов поверхностного волнения внутри контура судна достигает максимума, формируют последовательность матриц, содержащих эхо-сигналы от корпуса морского судна, его локальных источников и поверхностного волнения моря, в течение времени радиолокационного наблюдения за морским судном, на каждой матрице определяют координаты центральных элементов контуров двух максимально удаленных друг от друга локальных источников, выбранных из числа расположенных на корме и носу судна, отличающийся тем, что определяют координаты геометрического центра судна; определяют величины линейного смещения указанного центра за время между двумя смежными циклами сканирования антенны, формируют последовательность указанных смещений центра в течение времени наблюдения за судном, определяют линейное ускорение движения центра судна, временное положение максимума которого принимают в качестве основания для дистанционной регистрации выхода гребного винта на максимальные обороты.
РИСУНКИ
|
|