Патент на изобретение №2390003
|
||||||||||||||||||||||||||
(54) СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ КОЛЕСА С ПОВЕРХНОСТЬЮ АЭРОДРОМНОГО ПОКРЫТИЯ
(57) Реферат:
Изобретение относится к измерительной технике и может быть использовано для оценки состояния поверхности взлетно-посадочных полос аэродромов, а также для определения коэффициента сцепления дорожных покрытий. Способ заключается в определении силы динамического торможения, когда электродвигатель работает в генераторном режиме. При этом измерительное колесо катят по поверхности покрытия, а его механическая энергия вращения передается на генератор постоянного тока, превращается в электрическую и выделяется в виде тепловой энергии в активной нагрузке. При этом определяют нормальную нагрузку измерительного колеса на поверхность аэродромного покрытия. Дополнительно определяют продольную силу сцепления измерительного колеса с поверхностью аэродромного покрытия при заданной пробуксовке (проскальзывании) измерительного колеса, когда ступица измерительного колеса через каретку воздействует на датчик силы, при стабилизации нормальной нагрузки измерительного колеса на поверхность покрытия. Значение коэффициента динамического торможения определяют при тарировании устройства. Технический результат заключается в повышении точности определения коэффициента сцепления. 3 ил.
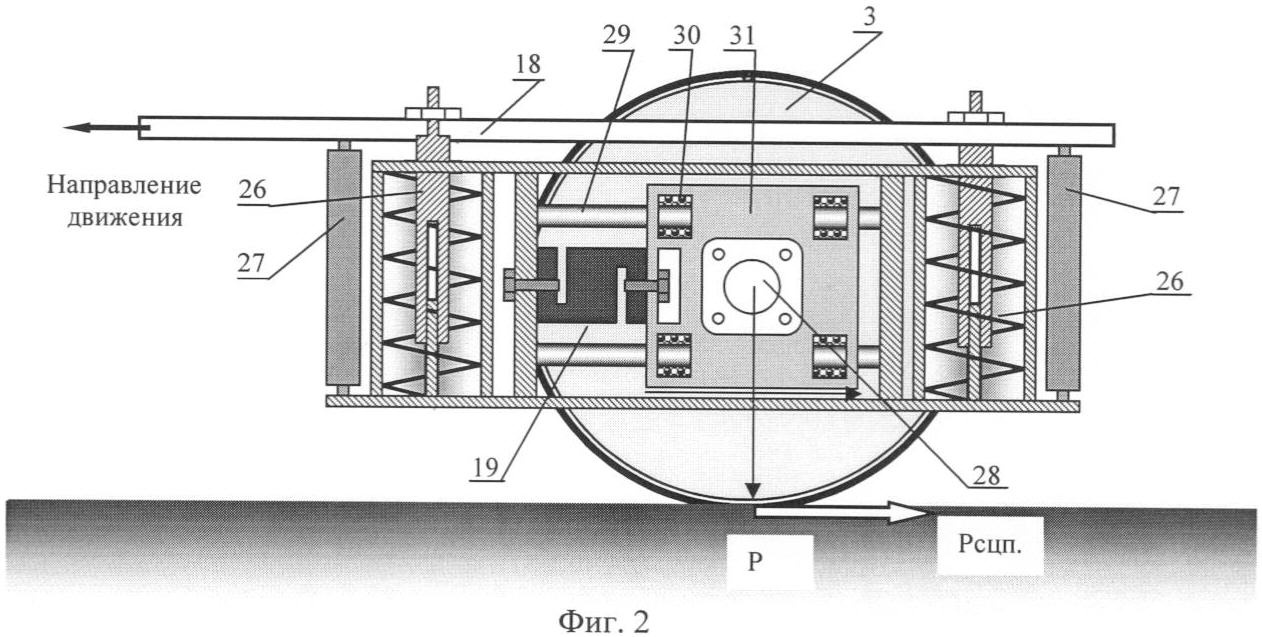
Изобретение относится к устройствам и системам для оценки состояния поверхности взлетно-посадочных полос (ВПП) аэродромов, но может также использоваться для определения коэффициента сцепления дорожных покрытий. Известен способ, когда в аэропорту отсутствуют средства оценки состояния летного поля, оценку эффективности торможения осуществляют обработкой результатов измерения расстояния или времени торможения. Грузовой или легковой автомобиль двигается с заданной скоростью, тормозится до остановки, при этом торможение осуществляют с полным юзом колес. При измерении дистанции торможения эффективность торможения определяют по формуле µs=V2/2gS, где V – скорость в момент включения тормозов, м/с; S – дистанция торможения, м; g – ускорение силы тяжести, м/с. При измерении времени торможения эффективность торможения определяется по формуле: µt=V/tg, где t – время до остановки, с. Получаемая величина эффективности торможения характеризует фрикционные свойства движения колес со 100%-ным скольжением. Для приведения результатов к торможению с проскальзыванием, соответствующим максимальной величине коэффициента торможения, следует полученные величины µs и µt умножить на 1,2 для значений в диапазоне 0 Недостатком этого способа является то, что из-за большого количества используемых в расчетах исходных параметров математической модели процесса торможения, каждый из которых измеряется с различной точностью, суммарная погрешность определения коэффициента сцепления достигает значительной величины. («Руководство по эксплуатации гражданских аэродромов Российской Федерации», РЭГА РФ-94, часть 3, приложение 6 – Методы и средства оценки состояния элементов летного поля.) Другим известным устройством является применяемая на аэродромах Российской Федерации “Аэродромная тормозная тележка “, АТТ-2. (Способ определения коэффициента сцепления описан в “Руководстве по эксплуатации гражданских аэродромов Российской Федерации”, РЭГА РФ-94, часть 3, приложение 6 – Методы и средства оценки состояния летного поля и в Авторском свидетельстве Способ определения коэффициента сцепления известного устройства заключается в следующем. Аэродромная тормозная тележка имеет два колеса: ведущее и измерительное, соединенных между собой редуктором. Колеса разных диаметров. Соотношение диаметров обеспечивает пробуксовку измерительного колеса на 15-17%. Вследствие пробуксовки измерительного колеса образуется максимальная продольная сила сцепления Рсцп.макс. измерительного колеса с поверхностью аэродромного покрытия, измеренная датчиком силы. Значение коэффициента сцепления Ксцп.макс. вычисляют по формуле: Ксцп.макс.=Рсцп.макс./Р. где Рсцп.макс. – продольная сила сцепления измерительного колеса с поверхностью аэродромного покрытия, Н; Р – нормальная сила нагрузки измерительного колеса на поверхность аэродромного покрытия, Н. Недостатком данного способа является то, что при измерении коэффициента сцепления требуется смачивание поверхности, что ограничивает использование данного способа в зимнее время. А также из-за разницы диаметров ведущего и измерительного колес имеет место занос аэродромной тормозной тележки – появляется поперечная сила торможения, появляется ошибка в определении продольной силы сцепления измерительного колеса с поверхностью аэродромного покрытия. Наиболее близким к заявленному изобретению по технической сущности является “Способ определения коэффициента сцепления колеса с аэродромным покрытием” (Заявка Российской Федерации В известном способе (прототипе) коэффициент сцепления колеса с аэродромным покрытием определяют методом динамического торможения, когда электродвигатель работает в генераторном режиме, при котором механическая энергия тормозного элемента (измерительного колеса) превращается в электрическую и выделяется в виде тепловой энергии в активной нагрузке. При этом определяют: нормальную нагрузку Р измерительного колеса на поверхность покрытия. Дополнительно определяют продольную силу сцепления Рсцп. измерительного колеса с поверхностью аэродромного покрытия и коэффициент динамического торможения k. Максимальное значение коэффициента сцепления Ксцп.макс. измерительного колеса с поверхностью аэродромного покрытия определяют по формуле Ксцп.макс.=(Рсцп./Р)k Где Ксцп.макс. – максимальное значение коэффициента сцепления колеса с поверхностью аэродромного покрытия; Рсцп. – продольная сила сцепления измерительного колеса с поверхностью аэродромного покрытия, Н; Р – нормальная нагрузка измерительного колеса на поверхность покрытия, H; k – коэффициент динамического торможения. Коэффициент динамического торможения k определяют как отношение Рсцп.макс. к Рсцп. (Рсцп.макс. – максимальная продольная сила сцепления измерительного колеса с поверхностью покрытия при 15-17% его пробуксовки.) k=Рсцп.макс./Рсцп. В известном способе (прототипе) определение максимального значения коэффициента сцепления Ксцп.макс. условно делится на два этапа – поиска и слежения. В режиме поиска осуществляют поиск силы динамического торможения Рт равной силе сцепления Рсцп. измерительного колеса с поверхностью покрытия. При равенстве Рт и Рсцп. измерительное колесо начинает проскальзывать. Режим поиска начинают с минимального и равномерного увеличения тока на активной нагрузке. При этом сила динамического торможения Рт измерительного колеса будет также пропорционально расти. Когда сила динамического торможения Рт станет равна силе сцепления Рсцп. измерительного колеса с поверхностью покрытия, – появляется пробуксовка измерительного колеса. Пробуксовка фиксируется. На этом режим поиска заканчивают. В режиме слежения отслеживают начало пробуксовки измерительного колеса. При этом обеспечивают равенство сил Рт и Рсцп. В режиме слежения в соответствии с программным обеспечением обеспечивают заданный минимальный диапазон пробуксовки, в пределах которого определяют силу динамического торможения Рт при этом Рт=Рсцп. Коэффициент динамического торможения k вычисляют при проведении тарирования устройства, как отношение Рсцп.макс. к Рсцп. Недостатком известного способа определения коэффициента сцепления Ксцп. является то, что измерительный элемент 19 (датчик силы) размещается между измерительной тележкой и транспортным средством. При этом показания датчика силы равно: Ри=Рт+Рк+Рв, где Ри – сила буксировки измерительной тележки; Рт – сила динамического торможения измерительного колеса; Рк – сила сопротивления качению ведомых колес, которая определяется по формуле Рк=GY; G – нормальная нагрузка на ось ведомых колес; Y – коэффициент сопротивления качению, который при скорости движения до 80 км/час равен 0,012; Рв – сила сопротивления воздуху. Каждая из приведенных величин Рт, Рк и Рв измеряется с различной точностью и результирующая погрешность вычисления коэффициента сцепления может достигать значительной величины. Целью предлагаемого способа является повышение точности в определении коэффициента сцепления измерительного колеса с поверхностью аэродромного покрытия. Повышение точности получают путем исключения из расчета коэффициента сцепления силы сопротивления качению Рк ведомых колес и силы сопротивления воздуха Рв. Измерение силы сцепления Рсцп измерительного колеса с поверхностью покрытия осуществляют непосредственно на ступице измерительного колеса. Улучшена амортизация независимого груза, что стабилизирует нормальную нагрузку Р измерительного колеса на поверхность покрытия. Поставленная цель в “Способе определения коэффициента сцепления колеса с поверхностью аэродромного покрытия” достигается тем, что в нем, как в прототипе, коэффициент сцепления колеса с поверхностью аэродромного покрытия определяется методом динамического торможения, когда электродвигатель работает в генераторном режиме. Измерительное колесо катят по поверхности покрытия, а его механическая энергия вращения передается на генератор постоянного тока, превращается в электрическую и выделяется в виде тепловой энергии в активной нагрузке, при этом определяют нормальную нагрузку Р измерительного колеса на поверхность аэродромного покрытия. Дополнительно определяют продольную силу сцепления Рсцп. измерительного колеса с поверхностью аэродромного покрытия при заданной пробуксовке (проскальзывании) измерительного колеса, когда ступица измерительного колеса через каретку воздействует на датчик силы при стабилизации нормальной нагрузки Р измерительного колеса на поверхность покрытия. Значение коэффициента динамического торможения k определяют при тарировании устройства. При этом максимальное значение коэффициента сцепления Ксцп.макс. вычисляют по формуле: Ксцп.макс.=(Рсцп/Р)k, где Ксцп.макс. – максимальное значение коэффициента сцепления измерительного колеса с аэродромным покрытием; Рсцп. – продольная сила сцепления измерительного колеса с поверхностью аэродромного покрытия, измеренная датчиком силы, при заданном значении пробуксовки (проскальзывании) измерительного колеса, Н; Р – нормальная нагрузка измерительного колеса на поверхность покрытия, Н; k – коэффициент динамического торможения, который вычисляют при тарировании устройства, как отношение Рсцп.макс. к Рсцп. Рсцп.макс. – продольная сила сцепления измерительного колеса при 15-17% его пробуксовки, Н. В известных технических решениях признаков, сходных с отличительными признаками заявленного способа, не обнаружено, вследствие чего можно считать, что предлагаемый способ соответствует изобретательскому уровню. Использование предложенного способа при его реализации позволит повысить безопасность при взлете и посадке летательных аппаратов путем повышения точности определения коэффициента сцепления авиашасси с поверхностью аэродрома. Сущность предлагаемого “Способа определения коэффициента сцепления колеса с поверхностью аэродромного покрытия” поясняется чертежами, где представлены: на фиг.1 – структурная схема, реализующая предложенный способ определения коэффициента сцепления; на фиг.2 – рисунок, поясняющий установку датчика силы и средств амортизации; на фиг.3 – алгоритм предложенного способа измерения коэффициента сцепления. В предлагаемом “Способе определения коэффициента сцепления колеса с поверхностью аэродромного покрытия,” как и в прототипе, коэффициент сцепления определяется методом динамического торможения, когда электродвигатель работает в генераторном режиме, при этом измерительное колесо катят по поверхности покрытия. Механическая энергия вращения измерительного колеса передается на генератор постоянного тока, превращается в электрическую и выделяется в виде тепловой энергии в активной нагрузке, при этом определяют нормальную нагрузку Р измерительного колеса на поверхность аэродромного покрытия. Дополнительно определяют продольную силу сцепления Рсцп. измерительного колеса с поверхностью аэродромного покрытия при заданной пробуксовке (проскальзывании) измерительного колеса, когда ступица 28 измерительного колеса 3 через каретку 31 воздействует на датчик силы 19, при стабилизации нормальной нагрузки Р измерительного колеса 3 на поверхность покрытия. Значение коэффициента динамического торможения k определяют при тарировании устройства. При этом максимальное значение коэффициента сцепления Ксцп.макс. вычисляют по формуле: Ксцп.макс.=(Рсцп/Р)k, где Ксцп.макс. – максимальное значение коэффициента сцепления измерительного колеса с аэродромным покрытием; Рсцп. – продольная сила сцепления измерительного колеса с поверхностью аэродромного покрытия, измеренная датчиком силы, при заданном значении пробуксовки (проскальзывании) измерительного колеса, Н; Р – нормальная нагрузка измерительного колеса на поверхность аэродромного покрытия, Н; k – коэффициент динамического торможения, который вычисляют при тарировании устройства, как отношение Рсцп.макс. к Рсцп.; Рсцп.макс. – продольная сила сцепления измерительного колеса при 15-17%-ов его пробуксовки, Н. Структурная схема устройства для реализации заявленного способа приведена на фиг.1. Устройство заявленного способа содержит: измерительную тележку 1 и блок регистрации 2. Измерительная тележка 1 снабжена измерительным колесом 3 – авиационное шасси и ведомыми колесами 17 – автомобильное шасси. В состав измерительной тележки 1 входят: – блокировочная муфта 4; – редуктор 5, которым обеспечивают номинальный диапазон скорости вращения генератора постоянного тока 8; – независимый груз 6, обеспечивающий нормальную нагрузку Р на измерительное колесо 3; – муфта свободного хода 7 обеспечивает передачу вращающего момента в одном направлении (от редуктора 5 к ротору генератора постоянного тока 8). – генератор постоянного тока 8, который работает в двух режимах: стартерном и генераторном. Стартерный режим обеспечивает разгон ротора генератора 8 до номинальной скорости вращения, что исключает перегрузку измерительного колеса при разгоне автомобиля-буксировщика. Генераторный режим обеспечивают силой сцепления измерительного колеса с поверхностью аэродромного покрытия; – блок силовых ключей 9, которым обеспечивают нагрузку генератора постоянного тока в соответствии с сигналами блока управления 22; – активная нагрузка 10; – первый 11 и второй 12 датчики угловых скоростей; – пусковое сопротивление 13; – аккумуляторная батарея 14, которой обеспечивают стартерный режим генератора 8; – регулятор напряжения 15 генератора; – контактор 16, подключающий аккумуляторную батарею 14 к генератору 8 в стартерном режиме; – рама 18 измерительной тележки 1; – датчик силы 19, которым определяют силу сцепления измерительного колеса 3 с поверхностью аэродромного покрытия. Установка датчика силы 19 изображена на фиг.2. Датчик силы 19 крепежными болтами с одной стороны крепится к стойке амортизаторов, а с другой – к каретке 31. Каретка 31 перемещается по направляющим валам 29. Для уменьшения трения направляющие валы снабжены подшипниками 30. Во время проведения измерений ступица 28 измерительного колеса 3 через каретку 31 воздействует на датчик силы 19 с силой, равной силе сцепления Рсцп. измерительного колеса 3 с поверхностью аэродромного покрытия. Для стабилизации нормальной нагрузки Р измерительного колеса 3 на поверхность покрытия используются пружинные 26 и гидравлические 27 амортизаторы. Блок регистрации 2 содержит: вычислитель 20, пульт управления 21, блок управления 22, блок памяти 23, контроллер 24 и дисплей 25. В заявленном “Способе определения коэффициента колеса с поверхностью аэродромного покрытия” тарирование осуществляют, как и в прототипе, на роликовом стенде. При тарировании калибруют датчик силы 19, определяют и вносят в блок памяти 23 показания датчика силы 19 при отсутствии динамического торможения Рт, определяют коэффициент динамического торможения k, который может определяться и проверяться в полевых условиях. Тарирование устройства осуществляют при изготовлении устройства, а затем в соответствии с инструкцией по эксплуатации. Способ определения коэффициента сцепления колеса с поверхностью аэродромного покрытия Определение коэффициента сцепления осуществляют в соответствии с алгоритмом работы устройства, приведенного на фиг.3. Для реализации предложенного способа проводят подготовительную работу: – на пульте управления 21 включают режим работы устройства – «измерение»; – включают блокировочную муфту 4; – на пульте управления 21 выставляют исходную информацию (дату, время, номер полосы, направление движения); – при гололеде включается стартерный режим, при этом ротор генератора постоянного тока 8 раскручивают до номинальной скорости вращения. После проведения подготовительной работы автомобиль-буксировщик набирает заданную скорость движения, при которой ротор генератора 8 вращается в диапазоне номинальной скорости вращения силой сцепления измерительного колеса 3 с поверхностью аэродромного покрытия. Процесс определения коэффициента сцепления, как в прототипе, условно делится на два этапа – поиска и слежения. В режиме поиска осуществляют поиск силы динамического торможения Рт, когда сила динамического торможения Рт станет равна силе сцепления Рсцп. измерительного колеса 3 с поверхностью покрытия Рт=Рсцп. В режиме слежения осуществляют слежение за началом пробуксовки в заданном диапазоне. При этом обеспечивают равенство сил Рт и Рсцп. При этом необходимо отметить, что датчик силы 19 установлен между подвижной кареткой 31, которая закреплена на ступице 28 измерительного колеса 3, и одним из вертикальных кронштейнов системы подвеса и амортизации измерительного колеса 3. При динамическом торможении Рт в месте контакта измерительного колеса 3 с поверхностью возникает сила сцепления Рсцп. с поверхность аэродромного покрытия, которая стремится сдвинуть измерительное колесо в противоположную сторону линейному перемещению измерительного колеса. Сила сцепления Рсцп. действует на ступицу 28 измерительного колеса 3, а значит и на каретку 31, что вызывает появление силы растяжения датчика силы 19. При этом сила растяжения датчика силы 19 равна силе сцепления Рсцп. измерительного колеса с поверхность покрытия. Для стабилизации нормальной нагрузки Р измерительного колеса 3 на поверхность покрытия используются пружинные 26 и гидравлические 27 амортизаторы (фиг.2). Режим поиска начинают с минимального и равномерного увеличения тока на активной нагрузке блока 10. При этом сила динамического торможения Рт измерительного колеса 3 будет также пропорционально расти. Когда сила динамического торможения Рт станет равна силе сцепления Рсцп. измерительного колеса, появляется его пробуксовка. Пробуксовка измерительного колеса 3 определяется по информации датчиков угловых скоростей 11 и 12. Каждый из датчиков выдает по 1000 импульсов за один оборот. Из импульсов датчика угловых скоростей 12, установленного на ведомом колесе, формируется период Т. За один оборот ведомого колеса формируется пять периодов Т. Каждый из периодов синхронизирует работу всего устройства. Если за период Т количество импульсов с датчика угловых скоростей 11 пришло меньше в сравнении с датчиком 12, появилась пробуксовка измерительного колеса 3. На этом режим поиска заканчивают. В режиме слежения обеспечивают слежение за началом пробуксовки измерительного колеса 3. Информация датчиков 11 и 12 (измерительного 3 и ведомого 17 колес) поступает в вычислитель 20, где их показания сравниваются. Пробуксовка измерительного колеса отсутствует – показания датчиков угловой скорости 11 и 12 равны между собой. В этом случае с вычислителя 20 в блок управления 22 поступает сигнал увеличения нагрузки на генератор 8. Сигнал увеличения нагрузки с блока управления 22 поступает в блок силовых ключей 9. Нагрузка блока 10 увеличивается. Возрастает нагрузка на генераторе 8, увеличивается сила динамического торможения Рт измерительного колеса 3. С появлением пробуксовки измерительного колеса увеличение тока на активной нагрузке блока 10 прекращается. Если пробуксовка измерительного колеса 3 больше заданной величины, тогда уменьшают ток активной нагрузки блока 10, соответственно уменьшается нагрузка на генератор 8, уменьшается сила динамического торможения Рт измерительного колеса 3, уменьшается его пробуксовка. При достижении заданной величины пробуксовки дальнейшее уменьшение тока нагрузки блока 10 прекращается. В соответствии с программным обеспечением вычислителем 20 обеспечивают заданный минимальный диапазон пробуксовки – nб, в пределах которого определяют силу динамического торможения Рт и силу сцепления измерительного колеса Рсцп., при этом Рт=Рсцп. Контроль за работой устройства осуществляют на дисплее 25. При необходимости информация о состоянии поверхности летного поля считывается через контроллер 24 на внешние устройства. Максимальный коэффициент сцепления измерительного колеса с поверхностью аэродромного покрытия определяют по формуле: Ксцп.макс.=(Рсцп./Р)k Положительный эффект от реализации предложенного способа заключается в том, что при определении силы сцепления Рсцп. измерительного колеса с поверхностью аэродромного покрытия из расчетов исключают определение силы качения Рк ведомых колес и силу сопротивления воздуха Рв, что повышает точность определения силы сцепления Рсцп. и Рсцп.макс. С увеличение точности Рсцп. и Рсцп. макс. увеличивается и точность расчета коэффициента динамического торможения k. Пружинные 26 и гидравлические 27 амортизаторы стабилизируют нормальную нагрузку Р измерительного колеса 3 на поверхность аэродромного покрытия, когда измерительное колесо 3 переезжает через стыковочные швы плит взлетно-посадочной полосы, что также увеличивает точность в определении максимального значения коэффициента сцепления.
Формула изобретения
Способ определения коэффициента сцепления колеса с поверхностью аэродромного покрытия методом динамического торможения, когда электродвигатель работает в генераторном режиме, при этом измерительное колесо катят по поверхности покрытия, а его механическая энергия вращения передается на генератор постоянного тока, превращается в электрическую и выделяется в виде тепловой энергии в активной нагрузке, при этом определяют нормальную нагрузку Р измерительного колеса на поверхность аэродромного покрытия, отличающийся тем, что дополнительно определяют продольную силу сцепления (Рсцп.) измерительного колеса с поверхностью аэродромного покрытия при заданной пробуксовке (проскальзывании) измерительного колеса, когда ступица измерительного колеса через каретку воздействует на датчик силы, при стабилизации нормальной нагрузки Р измерительного колеса на поверхность покрытия значение коэффициента динамического торможения k определяют при тарировании устройства, при этом максимальное значение коэффициента сцепления (Ксцп.макс.) вычисляют по формуле
РИСУНКИ
|
||||||||||||||||||||||||||
 0,3 ед. к.с. и на 1,3 для значений в диапазоне 0,31
0,3 ед. к.с. и на 1,3 для значений в диапазоне 0,31 630982, кл. 01N 19/02 – “Устройство для определения коэффициента сцепления колеса с аэродромным покрытием.”)
630982, кл. 01N 19/02 – “Устройство для определения коэффициента сцепления колеса с аэродромным покрытием.”)