Патент на изобретение №2386954
|
||||||||||||||||||||||||||
(54) УСТАНОВКА ДЛЯ ДОСМОТРА ГРУЗОВ
(57) Реферат:
Использование: для досмотра грузов посредством проникающего излучения. Сущность: заключается в том, что установка для досмотра грузов содержит механическое транспортировочное устройство для удерживания и перемещения досматриваемого объекта, которое формирует путь движения досматриваемого объекта в установке, генератор излучения для получения пучка излучения, которым просвечивается досматриваемый объект, блок сбора информации для получения данных об излучении, прошедшем сквозь досматриваемый объект, и обработки полученных данных, при этом путь движения досматриваемого объекта содержит по меньшей мере два прямолинейных участка, которые находятся под углом друг к другу, блок сбора информации содержит по меньшей мере две матрицы детекторов для измерения пучков излучения, причем каждая матрица детекторов соответствует одному прямолинейному участку, и плоскость приема каждой из матриц детекторов параллельна соответствующему ей прямолинейному участку, причем когда установка работает, генератор излучения и блок сбора информации остаются неподвижными, а досматриваемый груз перемещается по пути движения и при этом совершает поступательное движение на указанных по меньшей мере двух участках без какого-либо вращения. Технический результат: обеспечение возможности быстрого досмотра грузов, а также получение их трехмерного изображения без использования кругового или спирального сканирования и, как следствие, упрощение механической конструкции установки. 21 з.п. ф-лы, 7 ил.
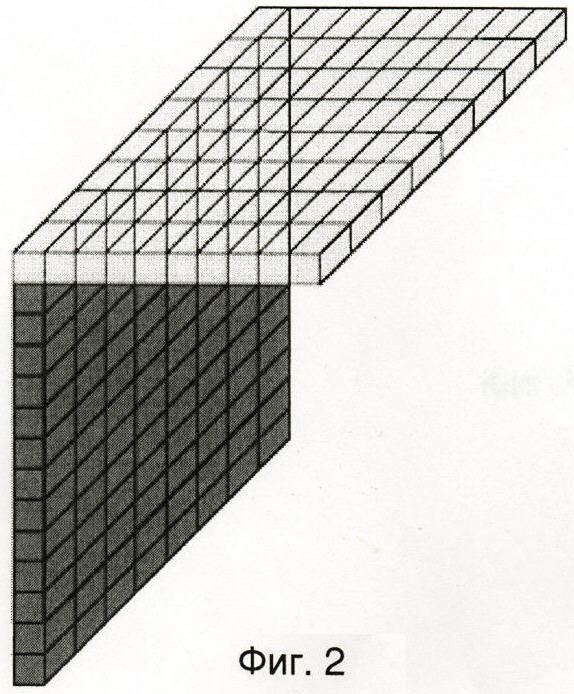
ОБЛАСТЬ ТЕХНИКИ Изобретение относится к получению изображений объектов при их просвечивании проникающим излучением и в частности к установкам для досмотра грузов. ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ Досмотр грузов имеет большое значение в таких областях, как антитеррористическая деятельность и борьба с провозом наркотиков и контрабандных товаров. После нападений террористов 11 сентября в Соединенных Штатах, во многих странах все больше внимания уделяется проблеме досмотра грузов, и в частности принят ряд серьезных мер по ужесточению досмотра багажа пассажиров и грузовых контейнеров в общественных местах, таких как аэропорты, автобусные вокзалы, таможенные посты и порты. В настоящее время основной технологией, широко применяемой в досмотровых установках, является технология получения изображений объектов при их просвечивании проникающим излучением. Основанная на экспоненциальном затухании излучения (фотонов) технология получения радиационных изображений заключается в следующем: для просвечивания излучением досматриваемого объекта используется источник радиации, расположенный с одной стороны от объекта; излучение, прошедшее сквозь досматриваемый объект, принимается устройством измерения излучения, преобразующим принятое излучение в выходные сигналы в цифровой форме, которые объединяются в массив проекционных данных, передаваемых в компьютер для получения изображений, причем компьютер обрабатывает собранные данные и синтезирует или реконструирует изображение и отображает его. Радиационные изображения, получаемые в досмотровых установках, могут быть томографическими или радиографическими изображениями. Томографические изображения досматриваемого объекта могут объединяться для получения трехмерного изображения, получаемого путем объединения многочисленных томографических срезов; радиографическое изображение представляет собой двумерное перспективное изображение досматриваемого объекта. Поскольку для получения томографических изображений требуется, чтобы устройство сбора информации получало проекционные данные в результате измерения излучения при просвечивании досматриваемого объекта со всех сторон, то томографическая досмотровая установка в общем случае должна содержать аппарат компьютерной томографии (КТ), в котором по меньшей мере досматриваемый объект или источник радиации должен вращаться. Для практического применения в общем случае необходима досмотровая установка, обеспечивающая работу в режиме реального времени с высокой скоростью получения изображений. Например, грузы, перевозимые гражданской авиацией, досматриваются на таможне с достаточно высокой скоростью 0,5 м/с, которая практически не может быть обеспечена даже КТ-аппаратом со спиральным сканированием, в котором используется большой шаг спирали. Кроме того, для объектов больших размеров, таких как, например, контейнеры, проходящие через таможню, очень трудно обеспечить вращение контейнера или источника радиации. Также следует заметить, что стоимость КТ-аппаратов достаточно высока. Вышеуказанные факторы не позволяют использовать в досмотровых установках КТ-аппараты для обеспечения режима получения трехмерных изображений, который находит все более широкое применение. Что же касается радиографических досмотровых установок, то они, в отличие от томографических досмотровых установок, широко используются в общественных местах, таких как аэропорты, автобусные вокзалы, таможенные терминалы и порты. Однако в радиографических досмотровых установках не удается устранить недостаток, связанный с перекрытием изображений предметов в направлении прохождения пучка излучения, и поэтому эффективность досмотра с использованием радиографических досмотровых установок недостаточно высока. КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ В свете вышеизложенного основной целью настоящего изобретения является создание установки для досмотра грузов, которая обеспечивает выполнение требований к таким установкам по скорости досмотра, и в то же время в ней решаются проблемы, связанные с трудностью вращения объектов больших размеров и перекрытием частей досматриваемых объектов на пути прохождения пучка излучения, которые характерны для радиографических досмотровых систем. Для достижения указанной цели в настоящем изобретении предлагается следующее техническое решение. Установка для досмотра грузов, через которую перемещается досматриваемый объект и которая содержит: механическое транспортировочное устройство для удерживания и перемещения досматриваемого объекта, которое формирует путь движения досматриваемого объекта в установке; генератор излучения для получения пучка излучения, которым просвечивается досматриваемый объект; блок сбора информации для получения данных об излучении, прошедшем сквозь досматриваемый объект, и обработки полученных данных; причем путь движения досматриваемого объекта содержит по меньшей мере два прямолинейных участка, которые находятся под углом друг к другу; блок сбора информации содержит по меньшей мере две матрицы детекторов для измерения пучков излучения, причем каждому прямолинейному участку соответствует одна матрица детекторов, и плоскость приема каждой из матриц детекторов параллельна соответствующему ей прямолинейному участку; и когда установка работает, генератор излучения и блок сбора информации остаются неподвижными, а досматриваемый груз перемещается по пути движения и при этом он совершает поступательное движение на указанных по меньшей мере двух участках без какого-либо вращения. Предпочтительно установка содержит дополнительно блок получения изображений, причем блок сбора информации объединяет полученные данные об излучении, прошедшем сквозь досматриваемый объект, в проекционные данные для передачи в блок получения изображений, в котором по проекционным данным осуществляется реконструкция изображения. Предпочтительно установка содержит дополнительно устройство отображения для отображения изображений, реконструируемых в блоке получения изображений. Генератор излучения предпочтительно содержит один источник радиации, который используется для всех матриц детекторов, или генератор излучения содержит несколько источников радиации, по одному источнику на одну матрицу детекторов. Механическое транспортировочное устройство предпочтительно содержит транспортер для удерживания и транспортировки досматриваемого объекта и управляющее устройство для управления движением досматриваемого объекта по пути движения. Механическое транспортировочное устройство предпочтительно устроено таким образом, чтобы обеспечивать только поступательное движение досматриваемого объекта на каждом из по меньшей мере двух участков без какого-либо вращения. Механическое транспортировочное устройство предпочтительно устроено таким образом, чтобы обеспечивать только поступательное движение досматриваемого объекта на каждом из по меньшей мере двух участков с постоянной скоростью и без какого-либо вращения. Путь движения досматриваемого объекта предпочтительно содержит дополнительно переходную часть между соседними прямолинейными участками. Механическое транспортировочное устройство предпочтительно устроено таким образом, чтобы обеспечивать только поступательное движение досматриваемого объекта на указанной переходной части без какого-либо вращения. Механическое транспортировочное устройство предпочтительно устроено таким образом, чтобы обеспечивать только поступательное движение досматриваемого объекта на всем пути движения без какого-либо вращения. Механическое транспортировочное устройство предпочтительно устроено таким образом, чтобы обеспечивать только поступательное движение досматриваемого объекта на всем пути движения с постоянной скоростью и без какого-либо вращения. Генератор излучения и блок сбора информации предпочтительно размещаются с обеих сторон пути движения. Предпочтительно блок сбора информации дополнительно содержит: схему преобразования сигналов для преобразования сигналов, соответствующих излучению, принятому матрицами детекторов, в данные об излучении, прошедшем сквозь досматриваемый объект; схему обработки данных для объединения данных об излучении, принятых из схемы преобразования сигналов, в проекционные данные; и логическую схему управления для синхронизации работы матриц детекторов, вырабатывающих сигналы, соответствующие излучению, прошедшему сквозь досматриваемый объект, и схемы обработки данных, передающей проекционные данные. В установке предпочтительно используются линейные или двумерные матрицы детекторов. Линейные матрицы предпочтительно расположены на равных расстояниях или под равными углами, а двумерные матрицы имеют плоскую, цилиндрическую или Г-образную форму. Блок получения изображений предпочтительно реконструирует по проекционным данным перспективное изображение и/или томографическое изображение. Блок получения изображений формирует томографическое изображение предпочтительно с использованием алгоритма обратного проецирования с линейной фильтрацией. Предпочтительно матрицы детекторов являются двумерными матрицами, и блок получения изображений дополнительно объединяет томографические изображения в трехмерное изображение. Блок получения изображений предпочтительно объединяет проекционные данные для формирования перспективного изображения для некоторого угла наблюдения или несколько перспективных изображений для нескольких углов наблюдения. Блок получения изображений предпочтительно обрабатывает проекционные данные с использованием одного из пяти типов обработки или любых их комбинаций: поправки на неравномерности характеристик детекторов, поправка на увеличение жесткости излучения, поправка на рассеяние, коррекция артефактов, обработка изображения и распознавание образов. Обработка изображения и распознавание образов предпочтительно содержит один из следующих режимов или их комбинации: улучшение изображения, обнаружение границ и интеллектуальная идентификация опасных предметов. Сумма углов раскрыва плоскостей приема матриц детекторов относительно соответствующих им источников радиации предпочтительно составляет примерно 180°. Предлагаемая в настоящем изобретении установка для досмотра грузов имеет следующие достоинства и преимущества, которые следуют из вышеописанных технических решений: 1. Поскольку в настоящем изобретении вместо круговой или спиральной траектории сканирования используется сканирование при движении досматриваемого груза по прямолинейным участкам пути движения, то осуществляется по существу прямолинейное движение досматриваемого груза, и потому не возникает проблема центробежной силы, типичная для кругового или спирального сканирования. Таким образом, может быть выполнено быстрое сканирование, и скорость получения изображений досматриваемого объекта существенно повышается. Время получения изображений досматриваемого объекта уменьшается настолько, что практически может быть выполнено требование по скорости досмотра грузов на таможне и, соответственно, может быть увеличена скорость досмотра грузов, перевозимых авиационным транспортом. Установка имеет хорошие перспективы применения и востребованности рынком. 2. Поскольку в настоящем изобретении используется сканирование при движении досматриваемого груза по прямолинейным участкам вместо кругового или спирального сканирования, так что досматриваемый груз совершает прямолинейное движение, то отпадает необходимость во вращении крупноразмерных объектов, которое создает серьезные проблемы. 3. Поскольку в соответствии с настоящим изобретением могут быть получены томографические изображения и трехмерные изображения досматриваемого объекта, то изобретение обеспечивает разрешение проблемы наложения предметов, возникающей в случае традиционной установки, обеспечивающей получение радиографических изображений. Кроме того, в соответствии с настоящим изобретением могут быть получены и обычные перспективные изображения с одного или нескольких углов наблюдения, и в предложенной установке в настоящем изобретении может быть выполнен предварительный досмотр объекта с использованием сначала перспективного изображения, и затем осуществляется получение томографических изображений, если обнаружены подозрительные зоны, так что окончательный досмотр осуществляется только в отношении этих подозрительных зон. 4. Поскольку в соответствии с настоящим изобретением отпадает необходимость во вращении досматриваемого объекта или источника радиации, и используется линейное просвечивание досматриваемого объекта, как в известных досмотровых установках, то предлагаемая в изобретении установка имеет простую механическую конструкцию и достаточно дешева в производстве. КРАТКОЕ ОПИСАНИЕ ПРИЛАГАЕМЫХ ЧЕРТЕЖЕЙ Фигура 1 – блок-схема, иллюстрирующая предложенное в настоящем изобретении техническое решение установки для досмотра грузов, в которой используется получение изображений при прохождении груза по прямолинейным участкам пути движения; фигура 2 – схематический вид Г-образной двумерной матрицы детекторов; фигура 3 – вид в плане установки для досмотра грузов, содержащей два прямолинейных участка пути движения груза, в соответствии с первым вариантом осуществления настоящего изобретения; фигура 4 – схематический вид, иллюстрирующий сканирование груза на одном из прямолинейных участков пути движения груза в установке для досмотра грузов, схема которой приведена на фигуре 3; фигура 5 – схематический вид томографического изображения по полученным данным в плоскости ху, когда трехмерное изображение реконструируется с использованием алгоритма обратного проецирования с линейной фильтрацией для досмотровой установки, схема которой приведена на фигуре 3; фигура 6 – примеры томографических изображений, реконструированных с использованием алгоритма обратного проецирования с линейной фильтрацией для досмотровой установки, схема которой приведена на фигуре 3, и перспективное изображение, полученное в установке, предложенной в настоящем изобретении; фигура 7 – вид в плане установки для досмотра грузов, содержащей несколько прямолинейных участков пути движения груза, в соответствии со вторым вариантом осуществления настоящего изобретения; ВАРИАНТЫ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ Рассмотренные ниже варианты осуществления настоящего изобретения используются для его иллюстрации и не ограничивают его объем. Основная идея настоящего изобретения заключается в следующем. Путь движения досматриваемого объекта в досмотровой установке содержит по меньшей мере два прямолинейных участка, которые проходят под углом друг к другу; для каждого из указанных прямолинейных участков установлена по меньшей мере одна матрица детекторов; и плоскость приема каждой из указанных матриц детекторов параллельна соответствующему ей прямолинейному участку пути груза; при работе установки источник радиации и блок сбора данных остаются неподвижными, а досматриваемый груз перемещается вдоль пути его движения, причем он совершает только поступательное движение по прямолинейным участкам, без какого-либо вращения. Таким образом, поскольку досматриваемый груз не вращается при движении по указанным по меньшей мере двум прямолинейным участкам пути, и плоскости приема по меньшей мере двух матриц детекторов находятся под углом друг к другу, то досматриваемый груз находится под разными углами относительно этих по меньшей мере двух матриц детекторов. Таким образом, предлагаемая в настоящем изобретении установка может получать проекционные данные при просвечивании излучением досматриваемого объекта в большем диапазоне углов, так что могут быть получены КТ-изображения досматриваемого объекта, и в то же время могут быть получены обычные радиографические изображения досматриваемого объекта для разных углов. В частности, когда сумма углов раскрыва матриц детекторов относительно соответствующих им источников радиации равна примерно 180°, то могут быть получены проекционные данные при просвечивании излучением досматриваемого объекта во всех направлениях, так что имеется возможность получения точного томографического изображения. На фигуре 1 приведена блок-схема технического решения установки досмотра грузов в соответствии с настоящим изобретением. Как показано на фигуре 1, установка содержит генератор 101 излучения, механическое транспортировочное устройство 102, блок 103 сбора информации, блок 104 получения изображений и устройство 105 отображения. Источник 101 излучения обеспечивает пучок излучения для просвечивания досматриваемого объекта, и излучение, прошедшее сквозь досматриваемый объект, поступает в блок 103 сбора информации. В качестве источника 101 излучения может использоваться рентгеновская трубка, ускоритель электронов или радиоизотопный источник. Для получения пучков излучения с углом раскрыва порядка 180°, в генераторе 101 излучения могут использоваться несколько источников радиации. Кроме того, генератор 101 излучения может дополнительно содержать вспомогательное устройство для защиты от излучения и регулирования угла раскрыва для обеспечения полного охвата матриц детекторов блока сбора информации. Механическое транспортировочное устройство 102 используется для удерживания и транспортировки досматриваемого объекта и определяет путь его движения в досмотровой установке. Путь движения, определяемый механическим транспортировочным устройством 102, содержит по меньшей мере два прямолинейных участка, которые находятся под некоторым углом друг к другу и которые будут рассмотрены подробно со ссылками на фигуры 3 и 7. Механическое транспортировочное устройство содержит транспортер для удерживания и транспортировки досматриваемого объекта и управляющее устройство для управления движением досматриваемого объекта внутри установки. Механическое транспортировочное устройство 102 перемещает досматриваемый объект в направлении, параллельном плоскости приема блока 103 сбора информации, то есть параллельно плоскостям приема матриц детекторов блока 103 сбора информации. При движении досматриваемого объекта по каждому из нескольких прямолинейных участков устройство управления управляет транспортером для обеспечения перемещения досматриваемого объекта в направлении, параллельном плоскости приема блока сбора информации, с постоянной скоростью, так что досматриваемый объект совершает поступательное движение. Кроме того, при движении с постоянной скоростью на переходной части между двумя соседними прямолинейными участками досматриваемый объект не поворачивается. В общем случае, для транспортировки досматриваемого груза может использоваться ленточный, цепной или роликовый транспортер или аналогичные механизмы, а в качестве управляющего устройства может использоваться электродвигатель. Блок 103 сбора информации используется для измерения излучения, прошедшего сквозь досматриваемый объект, и объединения полученной информации в проекционные данные, которые передаются в блок 104 получения изображений. Блок 103 сбора информации содержит по меньшей мере следующие части: матрицу детекторов, схему преобразования сигналов, схему обработки данных и логическую схему управления. Матрица детекторов используется для приема излучения, прошедшего сквозь досматриваемый объект, затем сигналы, соответствующие принятому излучению, преобразуются схемой преобразования сигналов в цифровые данные, которые объединяются в проекционные данные в схеме обработки данных. Кроме того, синхронная работа матрицы детекторов, принимающих излучение, и схемы обработки данных, вырабатывающей проекционные данные, обеспечивается логической схемой управления. Блок 103 сбора информации содержит по меньшей мере две матрицы детекторов, причем количество матриц детекторов равно количеству прямолинейных участков. Кроме того, плоскости приема матриц детекторов параллельны соответствующим прямолинейным участкам. Таким образом, поскольку прямолинейные участки проходят под углом друг к другу, то и матрицы детекторов находятся под некоторым углом друг к другу. Кроме того, поскольку досматриваемый объект перемещается поступательно по пути движения, он будет находиться под разными углами относительно указанных по меньшей мере двух матриц детекторов, так что пучки излучения могут проходить сквозь досматриваемый объект под разными углами для попадания на соответствующие матрицы детекторов. Для получения данных прохождения излучения максимально возможно по всем направлениям сумма углов плоскостей приема матриц детекторов и их соответствующих источников радиации предпочтительно составляет примерно 180°. Однако в некоторых случаях, когда требования к точности понижены, сумма углов может быть меньше 180°. Матрицы детекторов могут быть линейными или плоскостными матрицами. Детекторы линейных матриц расположены на одинаковых расстояниях друг от друга или под одинаковыми углами. Двумерные матрицы детекторов могут быть плоскими (панель), цилиндрическими или Г-образными. По сравнению с плоскими или цилиндрическими матрицами детекторов Г-образная матрица может существенно уменьшить необходимое количество детекторов, когда Г-образная матрица накрывает объект, имеющий такую же высоту. Детекторы линейных или двумерных матриц могут быть твердотельными, газовыми или полупроводниковыми детекторами. Матрица детекторов в общем случае расположена напротив источника радиации, и путь движения досматриваемого объекта проходит между матрицей детекторов и источником радиации. В установке для досмотра грузов, в которой используется сканирование досматриваемого объекта для случая двух прямолинейных участков, необходимо использовать две матрицы детекторов, и угол, образуемый плоскостями приема двух матриц детекторов, больше 0° и меньше 180°. Как правило, плоскости приема двух матриц детекторов находятся под углом 90° градусов друг к другу. Относительное расположение двух матриц детекторов показано на фигуре 3, на которой представлен вид в плане установки для досмотра грузов, в которой используется получение изображений для случая двух прямолинейных участков, в соответствии с первым вариантом осуществления настоящего изобретения. В установке для досмотра грузов, в которой осуществляется сканирование досматриваемых грузов на более чем двух прямолинейных участках, относительное расположение нескольких матриц детекторов показано на фигуре 7, на которой представлен вид в плане установки для досмотра грузов, в которой используется получение изображений для случая нескольких (более двух) прямолинейных участков, в соответствии со вторым вариантом осуществления настоящего изобретения. Если в установке для досмотра грузов, в которой используется сканирование досматриваемых грузов на двух или более прямолинейных участках, имеется несколько матриц детекторов на некотором прямолинейном участке, то общая длина К отдельной секции матрицы детекторов связана с расстоянием Т (по перпендикуляру) от источника радиации до матриц детекторов следующим образом: чем больше расстояние Т, тем больше общая длина К, и величины Ф, К и Т связаны между собой отношением К=2Т·tan(Ф/2). Для получения проекционных данных в диапазоне углов порядка 180° должно выполняться отношение Ф=180/N, где Блок 104 получения изображений реконструирует томографическое изображение на основе проекционных данных, полученных из блока 103 сбора информации, в соответствии с алгоритмом обратного проецирования с линейной фильтрацией. С помощью этого алгоритма проекционные данные, полученные в результате сканирования досматриваемого объекта на всех прямолинейных участках, реконструируются, и все полученные реконструкции объединяются для формирования окончательного томографического изображения. В этом случае справедливо следующее. Если в блоке 103 сбора информации используются матрицы детекторов, то значение p(l, t, z) является значением проекционных данных, которое получает детектор, находящийся в точке t в слое z, когда объект приходит в точку с координатой l по оси X, где t, z – величины, полученные для положения, когда матрица детекторов соответствует центральной линии прямолинейного движения досматриваемого объекта. Далее, если D – это расстояние от источника радиации до центральной линии прямолинейного движения, и ±tm представляет максимальное и минимальные положения матрицы детекторов по оси X, то приблизительная оценка просвечиваемого объекта f(r,
где Q(l’,t,z)=q(l,t,z)*h(l) q(l,t,z)=p(l+t,t,z)
h – это ядро свертки с теоретическим значением
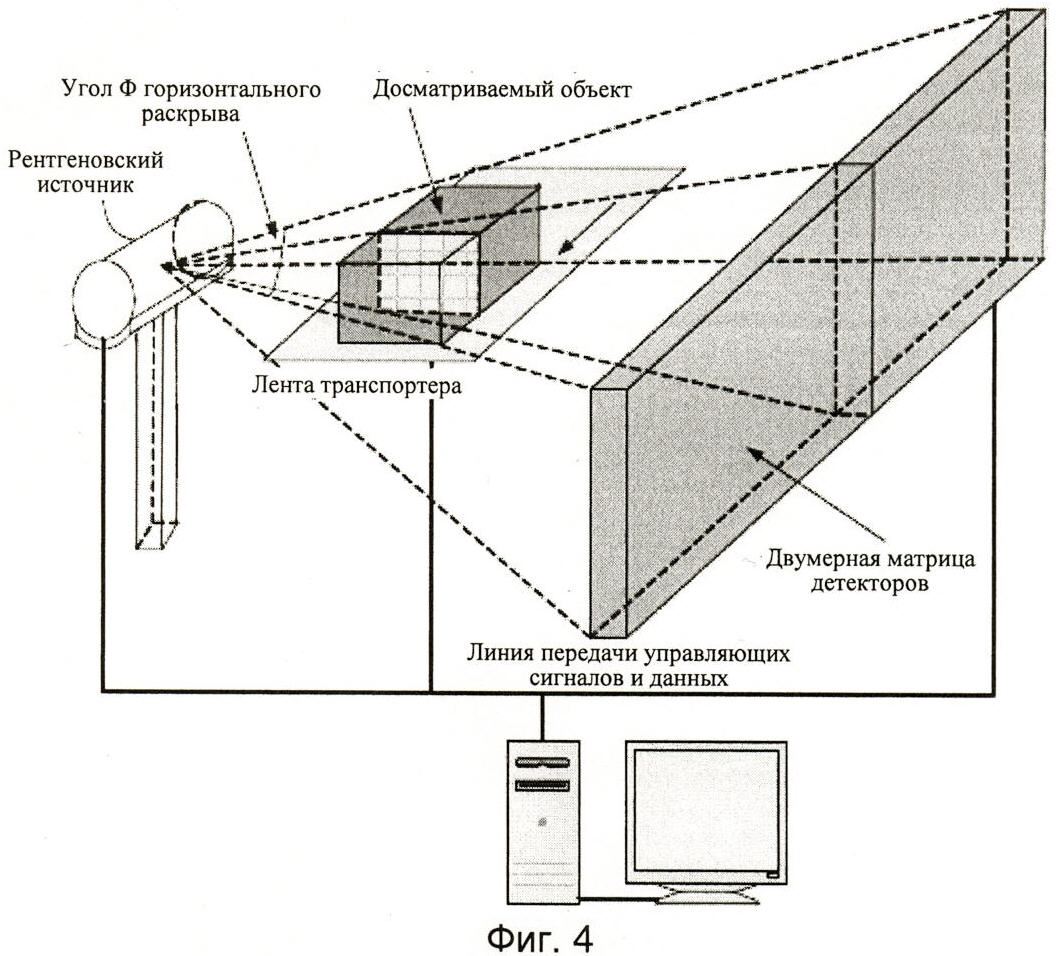
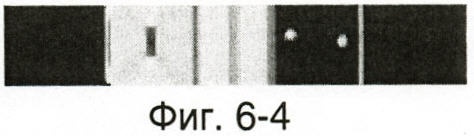
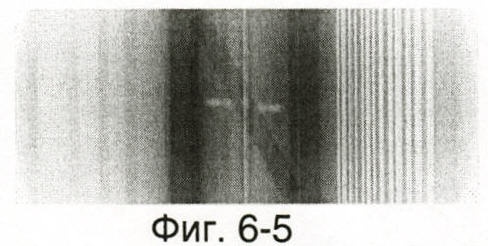
Алгоритм обратного проецирования с линейной фильтрацией характеризуется фильтрацией массива полученных проекционных данных в направлении l получения данных и интеграции массива полученных проекционных данных в направлении t детекторов для осуществления алгоритма обратного проецирования. Эти характеристики определяются прямолинейными участками, на которых осуществляется сканирование. По сравнению с методом ребиннинга (rebinning method), в котором данные, полученные для расходящихся лучей, преобразуются в данные для параллельных лучей, алгоритм обратной проекции с одномерной фильтрацией может более эффективно использовать все полученные проекционные данные для обеспечения более высокого разрешения реконструированного изображения, причем в этом случае чувствительность к недостаточности данных существенно ниже, чем в случае метода ребиннинга. Если в блоке 104 получения изображений по проекционным данным, полученным из блока сбора информации, осуществляется реконструкция томографического изображения, то процесс реконструкции содержит следующие стадии: фильтрацию проекционных данных, полученных из блока сбора информации, в направлении получения данных с использованием алгоритма обратного проецирования с линейной фильтрацией, интеграцию профильтрованных проекционных данных в направлении детектора для осуществления обратной проекции для получения томографического изображения. Блок 104 получения изображений может также объединять полученные томографические изображения в трехмерное изображение. Если в блоке 104 получения изображений осуществляется реконструкция перспективного изображения по проекционным данным, полученным из блока сбора информации, то процесс реконструкции содержит следующие стадии: объединение проекционных данных, полученных из блока сбора информации, для формирования перспективного изображения с одного направления или с нескольких направлений. На стадии объединения проекционных данных в блоке получения изображений может использоваться определенный столбец или несколько столбцов данных в нескольких (две и более) матрицах детекторов. Кроме того, реконструкция изображения в блоке 104 получения изображений по проекционным данным, полученным из блока сбора информации, содержит дополнительно стадию обработки проекционных данных с использованием одного из пяти типов обработки или любых их комбинаций: поправки на неравномерности характеристик детекторов, поправки на увеличение жесткости излучения, поправка на рассеяние, коррекция артефактов, обработка изображения и распознавание образов. Такая обработка изображения и распознавание образов содержит одну из следующих стадий или любых их комбинаций: улучшение изображения, обнаружение границ и интеллектуальная идентификация опасных предметов. Блок 104 получения изображений может представлять собой вычислительное устройство, компьютерную рабочую станцию или несколько компьютеров. Устройство 105 отображения используется для отображения трехмерного изображения или перспективного изображения, сформированного в блоке 104 получения изображений. В качестве такого устройства 105 отображения может использоваться дисплей на электронно-лучевой трубке или жидко-кристаллический дисплей. Вариант 1 осуществления изобретения На фигуре 3 приведен вид в плане установки для досмотра грузов, содержащей два линейных участка пути движения груза, в соответствии с первым вариантом осуществления настоящего изобретения. В этом варианте используются два источника рентгеновского излучения, например, источник I и источник II, входящие в генератор 101 излучения. В качестве источников I и II могут использоваться рентгеновские трубки, ускорители электронов или радиоизотопные источники. Конкретные типы используемых источников рентгеновского излучения зависят от досматриваемых объектов и особенностей практических применений. Рентгеновский источник создает пучок излучения с углом раскрыва 90° и обеспечивает просвечивание досматриваемого объекта в горизонтальной плоскости. Устройство управления в механическом транспортировочном устройстве 102 управляет транспортером для обеспечения поступательного перемещения досматриваемого объекта на участках I и II с постоянной скоростью, и, кроме того, досматриваемый объект не поворачивается при прохождении с постоянной скоростью переходной части между участками I и II. Блок 103 сбора информации содержит два комплекта двумерных матриц детекторов, расположенных напротив источников I и II. Плоскости приема двумерных матриц детекторов перпендикулярны плоскости, в которой находится платформа для установки груза механического транспортировочного устройства 102. Плоскости приема двух комплектов двумерных матриц детекторов образуют угол 90°. Блок 104 получения изображений представляет собой компьютерную рабочую станцию, которая обеспечивает управление, передачу данных, реконструкцию изображений и обработку информации установки для досмотра грузов. После поступления в рабочую станцию массива проекционных данных, полученных двумя комплектами двумерных матриц детекторов блока 103 сбора информации, рабочая станция осуществляет реконструкцию перспективного, томографического или трехмерного изображения досматриваемого объекта по проекционным данным с использованием алгоритма обратного проецирования с линейной фильтрацией и отображает реконструированное перспективное, томографическое или трехмерное изображение на дисплее. На фигуре 4 приведен схематический вид, иллюстрирующий сканирование груза на одном из прямолинейных участков пути движения груза в установке для досмотра грузов, схема которой приведена на фигуре 3. Рентгеновский источник испускает пучок излучения с углом Ф раскрыва в горизонтальной плоскости для просвечивания в горизонтальной плоскости досматриваемого объекта, который перемещается на ленте транспортера с постоянной скоростью; пучок излучения, прошедший сквозь досматриваемый объект, падает на плоскость приема двумерной матрицы детекторов; детекторы двумерной матрицы обеспечивают получение проекционных данных и передают их в компьютер; компьютер осуществляет реконструкцию изображения по проекционным данным с использованием алгоритма обратного проецирования с линейной фильтрацией и затем отображает реконструированное изображение на дисплее. Для случая, когда установка для досмотра грузов в рассматриваемом варианте осуществляет реконструкцию томографических изображений с использованием алгоритма обратного проецирования с линейной фильтрацией, такое томографическое изображение для данных, полученных в плоскости ху, приведено на фигуре 5, а реконструированное томографическое изображение и перспективное изображение приведено на фигуре 6. На фигуре 5 приведен вид для результатов моделирования с использованием модели багажа, и результаты реконструкции показаны для центрального среза. На фигуре 5-1 приведен исходный вид модели, а на фигуре 5-2 приведен вид реконструированного томографического изображения в плоскости ху. На фигуре 6 приведены 4 вида, последовательно размещенные в верхней части, которые представляют исходный вид и перспективное изображение в плоскостях xz и yz до и после реконструкции модели багажа, где на фигуре 6-1 представлен схематический исходный вид центрального среза в плоскости xz до реконструкции модели багажа, на фигуре 6-2 представлен схематический вид перспективного изображения центрального среза в плоскости xz после реконструкции модели багажа, на фигуре 6-3 представлен схематический исходный вид центрального среза в плоскости yz до реконструкции модели багажа, и на фигуре 6-4 представлен схематический вид перспективного изображения центрального среза в плоскости yz после реконструкции модели багажа. На фигуре 6-5 представлен схематический вид перспективного изображения в плоскости xz после реконструкции модели багажа. Вариант 2 осуществления изобретения На фигуре 7 приведен вид в плане установки для досмотра грузов, содержащей несколько линейных участков пути движения груза, в соответствии со вторым вариантом осуществления настоящего изобретения. В этом варианте сканирование досматриваемого груза осуществляется на четырех прямолинейных участках пути движения досматриваемого груза. В досмотровой установке используются четыре источника рентгеновского излучения: источник I, источник II, источник III и источник IV, входящие в состав генератора излучения. В качестве источников I, II, III и IV могут использоваться рентгеновские трубки, ускорители электронов или радиоизотопные источники. Конкретные типы используемых источников рентгеновского излучения зависят от досматриваемых объектов и особенностей практических применений. Каждый рентгеновский источник излучает пучок излучения с углом раскрыва 45°, и сумма углов между плоскостями приема матриц детекторов и соответствующими источниками составляет 180°. Устройство управления в механическом транспортировочном устройстве управляет транспортером для обеспечения поступательного перемещения досматриваемого объекта на участках I, II, III и IV с постоянной скоростью, и, кроме того, досматриваемый объект не поворачивается при прохождении с постоянной скоростью переходных частей между указанными участками. Блок сбора информации содержит четыре комплекта двумерных матриц детекторов, расположенных напротив источников I, II, III и IV. Плоскости приема двумерных матриц детекторов перпендикулярны плоскости, в которой находится платформа для установки и перемещения груза механического транспортировочного устройства. Плоскости приема двух соседних комплектов двумерных матриц детекторов образуют угол 130°. Блок получения изображений представляет собой компьютерную рабочую станцию, которая обеспечивает управление, передачу данных, реконструкцию изображений и обработку информации установки для досмотра грузов. После поступления в рабочую станцию массива проекционных данных, полученных четырьмя комплектами двумерных матриц детекторов блока сбора информации, рабочая станция осуществляет реконструкцию перспективного, томографического или трехмерного изображения досматриваемого объекта по проекционным данным с использованием алгоритма обратного проецирования с линейной фильтрацией и отображает реконструированное перспективное, томографическое или трехмерное изображение на дисплее. В рассматриваемом варианте были получены такие же результаты реконструкции томографических и перспективных изображений с использованием алгоритма обратного проецирования с линейной фильтрацией, как и в вышеописанном варианте 1. Чтобы не увеличивать объем описания, изображения для этого варианта не приводятся. В описании были рассмотрены только варианты осуществления настоящего изобретения, и они никоим образом не ограничивают его объем. В соответствии с вышеприведенным описанием средний специалист в данной области техники очевидно может предложить некоторые альтернативные решения, которые должны быть включены в объем охраны настоящего изобретения.
Формула изобретения
1. Установка для досмотра грузов, через которую перемещается досматриваемый объект, содержащая: 2. Установка по п.1, содержащая дополнительно блок получения изображений, причем блок сбора информации объединяет полученные данные об излучении, прошедшем сквозь досматриваемый объект, в проекционные данные для передачи в блок получения изображений, в котором по проекционным данным осуществляется реконструкция изображения. 3. Установка по п.2, содержащая дополнительно устройство отображения для отображения изображений, реконструируемых в блоке получения изображений. 4. Установка по п.1, отличающаяся тем, что генератор излучения содержит один источник радиации, который используется для всех матриц детекторов, или генератор излучения содержит несколько источников радиации, по одному источнику на одну матрицу детекторов. 5. Установка по п.1, отличающаяся тем, что механическое транспортировочное устройство содержит транспортер для удерживания и транспортировки досматриваемого объекта и управляющее устройство для управления перемещением досматриваемого объекта по пути движения. 6. Установка по п.1, отличающаяся тем, что механическое транспортировочное устройство выполнено с возможностью обеспечения только поступательного движения досматриваемого объекта на каждом из по меньшей мере двух прямолинейных участков без какого-либо вращения. 7. Установка по п.1, отличающаяся тем, что механическое транспортировочное устройство выполнено с возможностью обеспечения только поступательного движения досматриваемого объекта на каждом из по меньшей мере двух прямолинейных участков с постоянной скоростью без какого-либо вращения. 8. Установка по п.1, отличающаяся тем, что путь движения досматриваемого объекта содержит дополнительно переходную часть между соседними прямолинейными участками. 9. Установка по п.8, отличающаяся тем, что механическое транспортировочное устройство выполнено с возможностью обеспечения только поступательного движения досматриваемого объекта на указанной переходной части без какого-либо вращения. 10. Установка по п.1, отличающаяся тем, что механическое транспортировочное устройство выполнено с возможностью обеспечения только поступательного движения досматриваемого объекта на всем пути движения без какого-либо вращения. 11. Установка по п.1, отличающаяся тем, что механическое транспортировочное устройство выполнено с возможностью обеспечения только поступательного движения досматриваемого объекта на всем пути движения с постоянной скоростью без какого-либо вращения. 12. Установка по п.1, отличающаяся тем, что генератор излучения и блок сбора информации размещены с обеих сторон пути движения. 13. Установка по п.2, отличающаяся тем, что блок сбора информации дополнительно содержит: 14. Установка по п.1, отличающаяся тем, что матрицы детекторов представляют собой линейные или двумерные матрицы детекторов. 15. Установка по п.14, отличающаяся тем, что линейные матрицы расположены на равных расстояниях или под равными углами, а двумерные матрицы имеют плоскую, цилиндрическую или Г-образную форму. 16. Установка по п.2, отличающаяся тем, что блок получения изображений выполнен с возможностью реконструирования по проекционным данным перспективного изображения и/или томографического изображения. 17. Установка по п.16, отличающаяся тем, что блок получения изображений выполнен с возможностью формирования томографического изображения с использованием алгоритма обратного проецирования с линейной фильтрацией. 18. Установка по п.17, отличающаяся тем, что матрицы детекторов являются двумерными матрицами, и блок получения изображений дополнительно объединяет томографические изображения в трехмерное изображение. 19. Установка по п.16, отличающаяся тем, что блок получения изображений объединяет проекционные данные для формирования перспективного изображения для некоторого угла наблюдения или нескольких перспективных изображений для нескольких углов наблюдения. 20. Установка по п.16, отличающаяся тем, что блок получения изображений выполнен с возможностью обработки проекционных данных с использованием одного из пяти типов обработки или любых их комбинаций: поправки на неравномерности характеристик детекторов, поправка на увеличение жесткости излучения, поправка на рассеяние, коррекция артефактов, обработка изображения и распознавание образов. 21. Установка по п.20, отличающаяся тем, что обработка изображений и распознавание образов содержит один из следующих режимов обработки или любых их комбинаций: улучшение изображения, обнаружение границ и интеллектуальная идентификация опасных предметов. 22. Установка по п.4, отличающаяся тем, что сумма углов раскрыва плоскостей приема матриц детекторов относительно их соответствующих источников радиации составляет примерно 180°.
РИСУНКИ
|
||||||||||||||||||||||||||
 005
005
 – угол раскрыва пучка излучения и N – количество линейных секций. Физический смысл параметров Ф, К и T можно понять из фигур 3 и 7. Когда матрица детекторов принимает излучение, прошедшее сквозь досматриваемый объект, он двигается с постоянной скоростью, и временные интервалы
– угол раскрыва пучка излучения и N – количество линейных секций. Физический смысл параметров Ф, К и T можно понять из фигур 3 и 7. Когда матрица детекторов принимает излучение, прошедшее сквозь досматриваемый объект, он двигается с постоянной скоростью, и временные интервалы  t приема излучения одинаковы. Если скорость движения досматриваемого объекта равна v, то расстояние, эквивалентное времени выборки данных матрицей детекторов, принимающей излучение, прошедшее сквозь досматриваемый объект, в установке для досмотра грузов в соответствии с настоящим изобретением равно
t приема излучения одинаковы. Если скорость движения досматриваемого объекта равна v, то расстояние, эквивалентное времени выборки данных матрицей детекторов, принимающей излучение, прошедшее сквозь досматриваемый объект, в установке для досмотра грузов в соответствии с настоящим изобретением равно  , z) имеет следующий вид:
, z) имеет следующий вид:

 где обычно используется функция фильтра S-L, и дискретная форма функции h имеет вид:
где обычно используется функция фильтра S-L, и дискретная форма функции h имеет вид: