Патент на изобретение №2386570
|
||||||||||||||||||||||||||
(54) СПОСОБ ИНДИКАЦИИ ЗЕМНОЙ ПОВЕРХНОСТИ ДЛЯ ОБЕСПЕЧЕНИЯ МАЛОВЫСОТНЫХ ПОЛЕТОВ САМОЛЕТОВ (ВЕРТОЛЕТОВ)
(57) Реферат:
Изобретение относится к области авиации, а именно к технике отображения информации в кабине пилотов. При выборе условных цветов графического представления рельефа вместо абсолютных или относительных высот используют отношение расчетных углов возвышения элементов рельефа над текущим положением самолета к предельным углам наклона траектории полета самолета. Подобная индикация земной поверхности при полете в складках рельефа дает летчику наглядную оперативную информацию о том, какие из препятствий на поверхности земли самолет сможет преодолеть, если из данной точки начнет переход в режим наивыгоднейшего набора высоты, а какие нет. Кроме того, летчику может быть предоставлена информация о возможности достижения точек на местности при снижении без разгона самолета (для фаз снижения перед сбросом воды и при заходе на забор воды). Изобретение позволяет повысить безопасность маловысотных полетов самолетов (вертолетов). 1 табл., 8 ил.
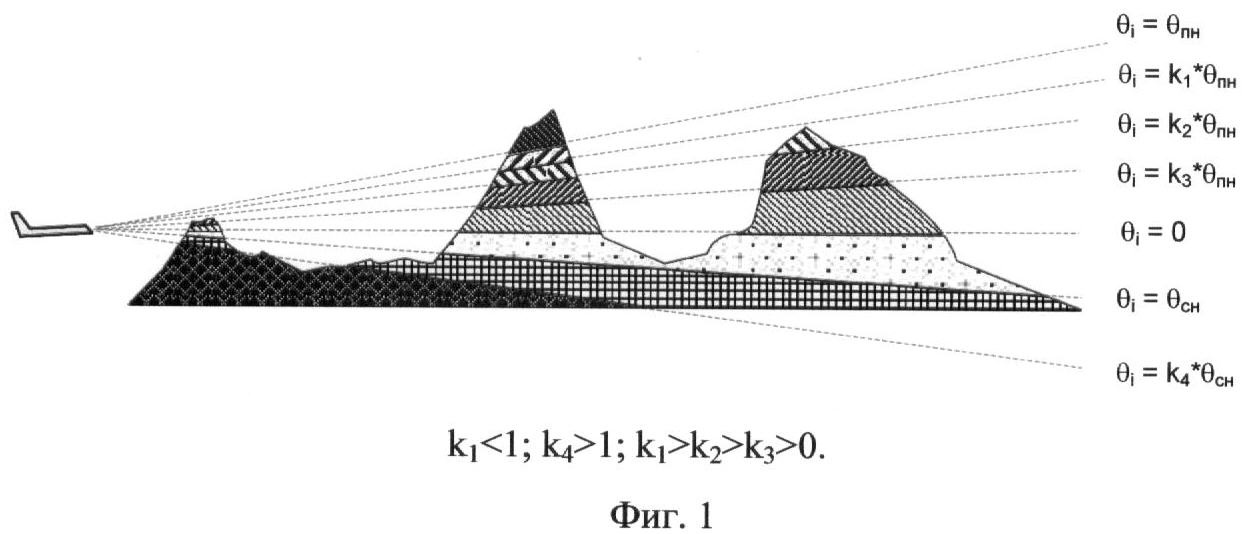
Изобретение относится к области авиационной техники, а именно к способам отображения информации в кабине пилотов. Существуют полетные задания, в которых требуется снижение самолета до предельно малых высот вне аэродромов в условиях сложного горного рельефа. Такие условия полетов типичны, например, для противопожарных самолетов-амфибий, которым приходится выполнять заборы воды на горных озерах, а сбросы воды – на горных склонах, причем пожаротушение эффективно только при сбросе с малых высот над очагом пожара (50 м и ниже). Разработанные для транспортной авиации средства предупреждения столкновения с землей (ниже 600 м вне аэродрома уже «опасная высота») для полетов в складках рельефа не предназначены. На основе только визуального контроля внекабинного пространства не всегда обеспечивается необходимый уровень безопасности полетов противопожарных самолетов – места забора и сброса воды не постоянны, а изучить рельеф досконально по одному-двум облетам невозможно. В местах сброса воды над пожаром высока вероятность ухудшения видимости из-за задымления. Летом 2007 г. произошло несколько катастроф самолетов-амфибий Canadair при тушении пожаров на юге Европы в горной местности, что свидетельствует о необходимости повышения безопасности маловысотных полетов противопожарной авиации. Известны компьютерные бортовые средства индикации внекабинной обстановки (индикаторы), основанные на использовании цифровых моделей рельефа и средств спутниковой навигации, такие как: 1. Автономное пилотажно-навигационное средство ПНС-А [1], которое обеспечивает изображение на дисплее рельефа подстилающей поверхности в трехмерном (3D) или двумерном виде. Функция предупреждения о столкновении с поверхностью и препятствиями реализована в виде линии безопасной высоты – мажоранты, определяемой автоматически, с учетом рельефа и скорости полета. 2. Навигационный прибор GNC 420 [2] фирмы Garmin, в котором предусмотрен режим индикации рельефа (режим “terrain”, аналогичный [3] по способу графического представления элементов рельефа). В последние годы фирма Garmin использует в своих индикаторах 3D технологию SVT (Synthetic Vision Technology). При этом «угрожающие» (пересекающиеся с прогнозом траектории самолета) элементы на трехмерном изображении рельефа подкрашиваются цветом опасности (красным). Наиболее близким техническим решением, выбранным в качестве прототипа, является способ отображения характера подстилающей поверхности на дисплее в системе раннего предупреждения приближения к земле ТТА-124 [3], где обеспечивается вывод информации на дисплей в виде карты. В стандартном режиме цвета и их насыщенность определяются высотой элементов подстилающей поверхности по отношению к текущей высоте воздушного судна (ВС). На дисплее отображаются только те элементы подстилающей поверхности, высота которых более, чем текущая высота ВС минус 600 м. Все остальные элементы закрашиваются черным цветом, на этапе крейсерского полета дисплей пустой (черный). В режиме абсолютных высот на дисплее отображаются все элементы подстилающей поверхности. Высота не опасных элементов (текущая высота ВС минус 600 м) индицируется градациями темно-зеленого цвета. Уровень моря индицируется голубым цветом. В этом режиме на дисплее отображаются символы ВПП (с учетом длины и курса ВПП) и символы точечных препятствий. Для систем, устанавливаемых на вертолеты, также отображаются линии электропередач. При маловысотных полетах над сложным рельефом важна оперативная информация о преодолимости встречаемых препятствий, т.е. о потенциальной способности самолета на пути к данному элементу рельефа набрать высоту, необходимую для предотвращения столкновения. Причем пилоту желательно знать, в каком направлении возможен безопасный выход из котловины или ущелья еще до того, как самолет будет переведен в режим набора высоты. Упомянутые способы индикации [1, 2, 3] малополезны для этой цели. Например, при снижении самолета для сброса воды в ущелье, практически, весь окружающий рельеф будет показан цветом опасности (красным). Линия безопасной высоты, которая изображается при способе индикации, примененном в [1], скорее всего будет требовать прекратить снижение (алгоритм ее формирования и способ интерпретации, к сожалению, в доступных документах не прояснены). А применяемая в 3D изображениях по технологии SVT (Garmin) индикация «угрожающих» элементов рельефа выделит цветом опасности именно тот участок местности, с которым самолет вынужден сближаться для выполнения успешного сброса воды. В этой ситуации представляется целесообразным не столько дать информацию о том, что самолет находится в опасных условиях (это заведомо известно летчику, сознательно выполняющему задачу сброса воды на сложном рельефе), сколько показать, какие элементы окружающего рельефа самолет не сможет преодолеть даже на пределе возможностей и какие элементы при грамотном пилотировании являются преодолимыми. Задачей предлагаемого изобретения является повышение безопасности маловысотных полетов самолетов (вертолетов) с помощью предлагаемого способа индикации земной поверхности. Поставленная задача достигается тем, что для обеспечения маловысотных полетов самолетов (вертолетов) применяется способ индикации земной поверхности, который заключается в показе двумерного или трехмерного изображения местности с раскраской существенных для пилотирования самолета элементов рельефа условными цветами, основанный на использовании цифровой модели рельефа местности, устройства спутниковой навигации, вычислителя, пульта управления, датчиков текущего состояния самолета, дисплея, базы данных о летно-технических характеристиках самолета, в том числе, о предельных углах наклона траектории и параметрах его типовых маневров разворота и разгона (торможения), и компьютерной программы, при этом на изображении рельефа условными цветами показывают соотношения между расчетными углами возвышения точек земной поверхности над текущим положением самолета и предельными углами наклона траектории полета самолета, при этом предельные углы наклона траектории определяют из базы данных на основе показаний датчиков текущего состояния самолета и с учетом заданных летчиком с пульта управления дополнительных условий, расчетные углы возвышения точек земной поверхности над текущим положением самолета определяют на основе цифровой модели рельефа, координат самолета, полученных через устройство спутниковой навигации, с учетом силы и направления ветра и параметров текущего состояния самолета, полученных от датчиков, а также параметров из базы данных, типовых маневров разворота и разгона (торможения) самолета. Главным отличием предлагаемого способа индикации от известных, перечисленных выше, является то, что при выборе условных цветов графического представления рельефа вместо абсолютных или относительных высот используется отношение расчетных углов возвышения элементов рельефа над текущим положением самолета к предельным углам наклона траектории полета самолета. В качестве расчетного угла возвышения в первом приближении понимается вертикальный угол визирования с самолета на точку рельефа, но для более полного учета факторов (влияние ветра, необходимость разгона или торможения для достижения наивыгоднейшей скорости, необходимость доворота самолета для выхода на данную точку), влияющих на способность самолета преодолеть препятствие, которое находится в данной точке, в расчетный угол могут быть введены поправки (см. формулу 1). Для элементов рельефа, которые находятся выше текущего положения самолета, цвет i-той точки на карте определяется соотношением расчетного угла возвышения Угол Влияние ветра обычно также включается в характеристику
ХI, Zi, Нi – координаты точки рельефа; Хс, Zс, Нс – текущие координаты самолета;
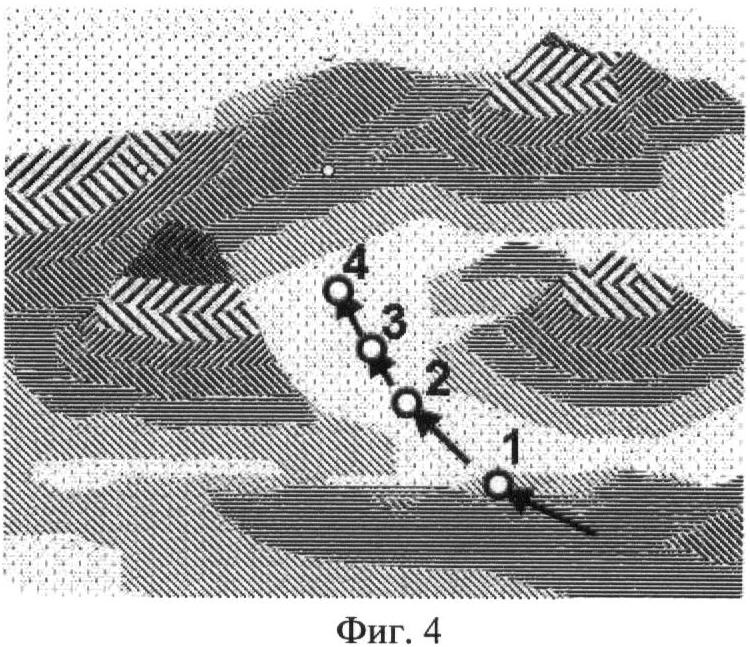
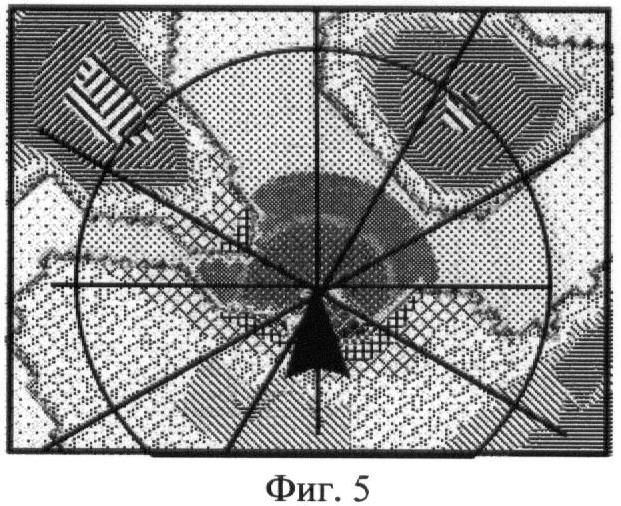
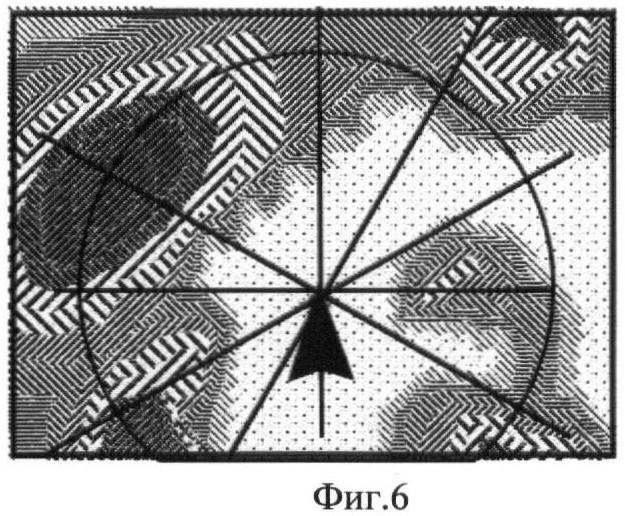
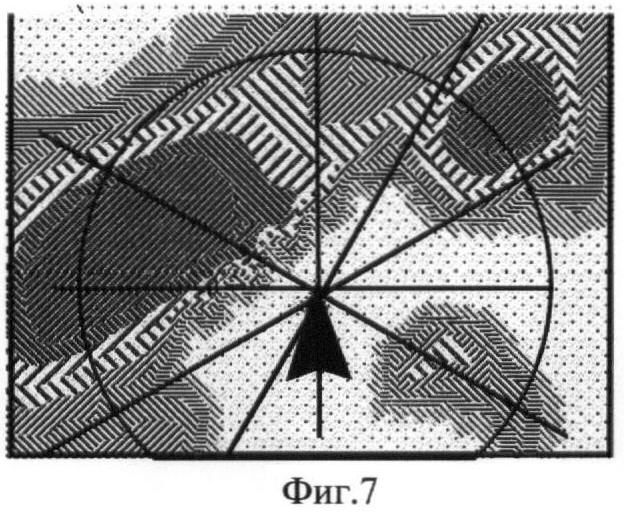
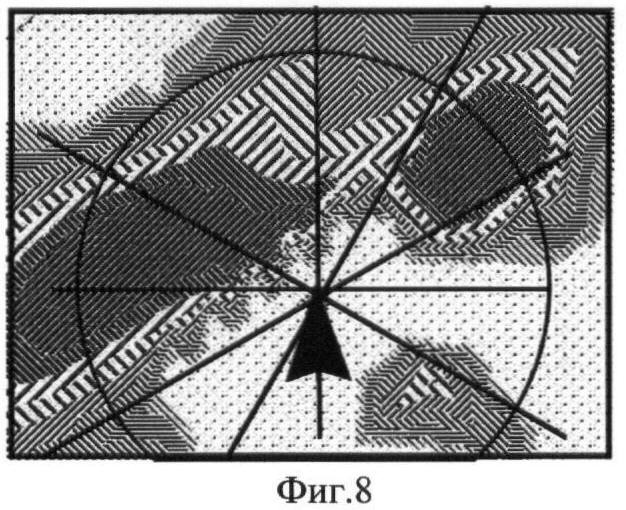
Поскольку речь идет о простых элементах траектории, параметры маневров могут быть определены на математических моделях заранее для спектра комбинаций условий, а в оперативном режиме потребные Для элементов рельефа, которые находятся ниже текущего положения самолета, цвета точек на карте определяются по аналогичному принципу, но вместо наклона траектории, предельного в наборе высоты, используется предельный угол наклона траектории Предлагаемое изобретение поясняется чертежами: – на фиг.1 показана цветовая схема индикации; – на фиг.2 показана схема реализации способа индикации земной поверхности; – на фиг.3 показана упрощенная схема реализации способа индикации земной поверхности; – на фиг.4 показано 3D изображение рельефа и схема траектории самолета-амфибии на заборе воды; – на фиг.5 показана предполагаемая индикация участка рельефа. Самолет в воздухе в точке 1 траектории, изображенной на фиг.4; – на фиг.6 показана предполагаемая индикация участка рельефа. Самолет на воде в точке 2 траектории, изображенной на фиг.4; – на фиг.7 показана предполагаемая индикация участка рельефа. Самолет на воде в точке 3 траектории, изображенной на фиг.4; – на фиг.8 показана индикация участка рельефа. Самолет на воде в точке 4 траектории, изображенной на фиг.4. – в таблице 1 приведены условные обозначения основных цветов индикации, использованные на фиг.1 и фиг.4-8. В вычислителе 1 (фиг.2) содержатся данные цифровой модели рельефа 2, база данных (БД) 3, содержащая летно-технические характеристики (ЛТХ) самолета, и компьютерная программа 4. В компьютерной программе 4 обеспечивается представление рельефа местности на дисплее 5 в виде карты или 3D изображения, где условными цветами показано соотношение между предельными углами наклона траектории полета самолета и расчетными углами возвышения элементов рельефа над текущим положением самолета. Предельные углы наклона траектории определяются на основе показаний датчиков 6 текущего состояния самолета, ЛТХ из БД 3 и с учетом заданных летчиком с пульта управления 7 дополнительных условий (учет возможного отказа двигателя, сброса воды и т.п.). Расчетные углы возвышения элементов рельефа над текущим положением самолета определяются на основе цифровой модели рельефа 2, координат самолета, полученных через устройство спутниковой навигации 8, с учетом силы и направления ветра и других текущих параметров движения, полученных от датчиков 6 состояния самолета, а также параметров из БД 3 типовых маневров разворота и разгона (торможения) самолета. Как представляется, предлагаемый способ индикации может быть полезен и в случае применения более простых, чем вышеизложенный, алгоритмов определения расчетных углов возвышения. В частности, можно представить упрощенные примеры универсальной (не связанной с конкретным типом самолета) схемы реализации такого способа индикации (при этом в формуле (1) добавки, которые не определены, принимаются равными 0). Например, в самом простом случае известные из РЛЭ предельные углы наклона траектории летчик вводит в вычислитель 1 с пульта 7. Возможные влияния ветра, предварительных маневров доворота и т.п. должны быть учтены летчиком при интерпретации изображения на дисплее. Другой пример: кроме предельных углов наклона траектории летчик вводит в вычислитель 1 рекомендуемые скорости самолета в наборе и на снижении, а также скорость и направление ветра. В этом случае В этих случаях возможна упрощенная конфигурация устройства, реализующего этот способ индикации (фиг.3), и оно может работать автономно (без связи с бортовым оборудованием, аналогично ПНС-А). При этом предельные углы наклона траектории, наивыгоднейшую скорость набора высоты и скорость, при которой выполнимо снижение без разгона, летчик вводит в программу 4 с пульта 7. Эти данные вводятся для нескольких вариантов условий, в том числе для варианта с отказом двигателя и, например, для вариантов заполнения водяных баков противопожарного самолета (до и после забора воды или до и после сброса воды). Также с пульта 7 вводятся скорость и направление ветра, а также выполняется выбор дополнительных условий индикации: учет возможного отказа двигателя, сброса воды и т.п. Расчетные углы возвышения элементов рельефа над текущим положением самолета определяются на основе цифровой модели 2 рельефа, координат самолета, полученных через устройство спутниковой навигации 8, и с учетом силы и направления ветра. Представление информации на дисплее может быть как в виде карты, так и в виде 3 D изображения. По аналогии с ПНС-А может быть обеспечено применение предлагаемого способа индикации в предполетной подготовке, чтобы заранее оценить выполнимость полетного задания, а также определить безопасные траектории подхода (ухода), например, на заборе или сбросе воды. Целесообразно предусмотреть возможность для летчика оперативно выбирать с пульта дополнительные условия индикации: при всех работающих двигателях или при отказе одного из двигателей, при заполненных водяных баках или при условии сброса воды. Предполагается применять предлагаемый способ индикации как один из режимов работы компьютерного бортового средства индикации внекабинной обстановки (по выбору летчика) наряду с известными. Также возможны комбинированные режимы, которые можно реализовать, например, путем наложения цветов, соответствующих предлагаемому способу индикации, в виде сеточной маски поверх существующей раскраски уже применяемых способов индикации. На фиг.4-8 показан пример предполагаемой индикации (в двумерном варианте, в виде карты) при выполнении забора воды. В данном примере забор воды следовало прекратить в точке 3. Из точки 4 нормальный взлет с водой уже невозможен – следует переключить индикатор на показ возможности взлета в случае сброса воды сразу после отрыва. Если и в этом случае нормальный набор высоты невозможен, следует прекращать взлет, откачивать воду, выполнять повторный взлет. Предлагаемый способ индикации земной поверхности позволит при полете в складках рельефа дать летчику наглядную оперативную информацию о том, какие из препятствий на поверхности земли самолет сможет преодолеть, если из данной точки начнет переход в режим наивыгоднейшего набора высоты, а какие нет. Также данный способ индикации может дать летчику информацию о возможности достижения точек на местности при снижении без разгона самолета (для фаз снижения перед сбросом воды и при заходе на забор воды). Использованная литература 1. Автономное пилотажно-навигационное средство ПНС-А. ООО «ТеКнол». www.teknol.ru 2. Garmin GNC 420(A) Pilit’s Guide and Reference 190-00140-20 Rev. H www8.garmin.com/products/manual 3. Система раннего предупреждения приближения к земле ТТА-124 ЗАО «Транзас». www.transas.ru (прототип)
Формула изобретения
Способ индикации земной поверхности для обеспечения маловысотных полетов самолетов (вертолетов), заключающийся в показе двумерного или трехмерного изображения местности с раскраской существенных для пилотирования самолета элементов рельефа условными цветами, основанный на использовании цифровой модели рельефа местности, устройства спутниковой навигации, вычислителя, пульта управления, датчиков текущего состояния самолета, дисплея, базы данных о летно-технических характеристиках самолета, в том числе о предельных углах наклона траектории и параметрах его типовых маневров разворота и разгона (торможения), и компьютерной программы, отличающийся тем, что на изображении рельефа условными цветами показывают соотношения между расчетными углами возвышения точек земной поверхности над текущим положением самолета и предельными углами наклона траектории полета самолета, при этом предельные углы наклона траектории определяют из базы данных на основе показаний датчиков текущего состояния самолета и с учетом заданных летчиком с пульта управления дополнительных условий, расчетные углы возвышения точек земной поверхности над текущим положением самолета определяют на основе цифровой модели рельефа, координат самолета, полученных через устройство спутниковой навигации, с учетом силы и направления ветра и параметров текущего состояния самолета, полученных от датчиков, а также параметров из базы данных типовых маневров разворота и разгона (торможения) самолета.
РИСУНКИ
|
||||||||||||||||||||||||||
 i и предельного (наибольшего достижимого самолетом в данных эксплуатационных условиях) угла наклона траектории
i и предельного (наибольшего достижимого самолетом в данных эксплуатационных условиях) угла наклона траектории 
 I, Ri,
I, Ri,