Патент на изобретение №2380489
|
||||||||||||||||||||||||||
(54) РЫХЛИТЕЛЬ УДАРНОГО ДЕЙСТВИЯ
(57) Реферат:
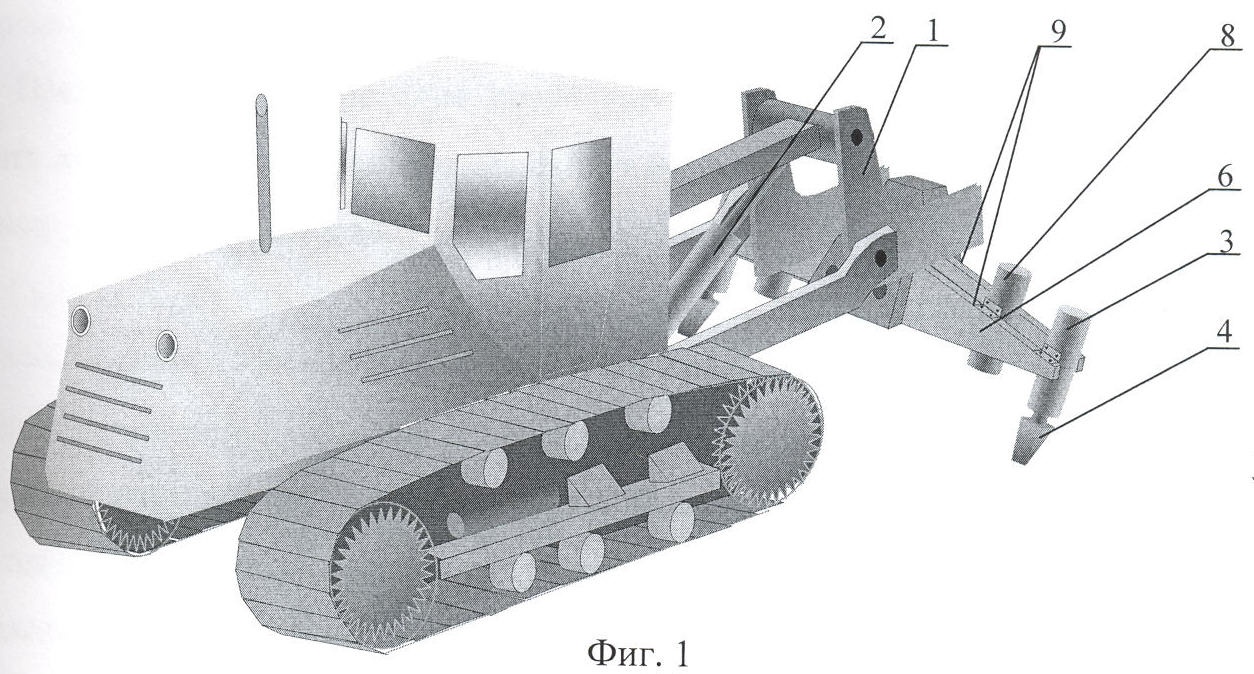
Изобретение относится к строительному и горному делу и может быть использовано при разработке скальных пород, прочных и мерзлых грунтов. Технический результат – повышение эффективности рыхления грунта и снижение динамических нагрузок, воздействующих на базовую машину. Рыхлитель ударного действия включает базовую машину, навесную раму 1, гидроцилиндр и пневмомолот 3. Пневмомолот 3 содержит корпус с установленным внутри поршнем-бойком 5 и зубом 4. Рыхлитель снабжен, по меньшей мере, одной балкой 6, соединенной с навесной рамой 1 при помощи оси вращения 7 и балансировочным грузом 8. При этом пневмомолот 3 и балансировочный груз 8 установлены на балке 6 с возможностью перемещения. 3 ил.
Изобретение относится к строительному и горному делу и может быть использовано при разработке скальных пород, прочных и мерзлых грунтов. Известен рыхлитель, включающий молот с двуплечим шарнирным рычагом, на концах которого установлены рыхлительные зубья (см. а.с. Однако этот рыхлитель имеет низкую эффективность при разработке грунтов, так как рыхление осуществляется без использования сил отдачи. Наиболее близким техническим решением к изобретению является рыхлитель, включающий базовую машину, смонтированный на навесной раме пневмомолот с корпусом, внутренняя полость которого разделена поршнем-бойком на переднюю и заднюю камеры и воздухораспределитель с источником сжатого воздуха (см. Захарчук Б.З. и др. Навесное тракторное оборудование для разработки высокопрочных грунтов. М., «Машиностроение», 1979 г., с.33-36). Недостатками указанного устройства являются нагрузка на навесную раму от сил отдачи и снижение за счет этого общей эффективности рыхления. Техническим результатом изобретения является повышение эффективности рыхления грунта за счет снижения динамических нагрузок, воздействующих на базовую машину, и передачи их в зону разрушения грунта. Сущность изобретения заключается в том, что рыхлитель, включающий базовую машину, навесную раму, гидроцилиндр и пневмомолот, содержащий корпус с установленным внутри поршнем-бойком и зубом, снабжен балкой, соединенной с навесной рамой при помощи оси вращения, и балансировочным грузом, при этом пневмомолот и балансировочный груз установлены на балке с возможностью перемещения, а расстояние от центра вращения балки до оси симметрии пневмомолота определяют из условия:
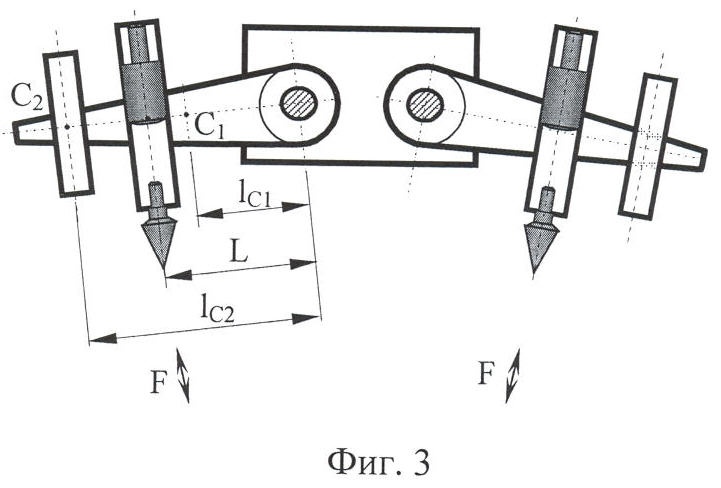
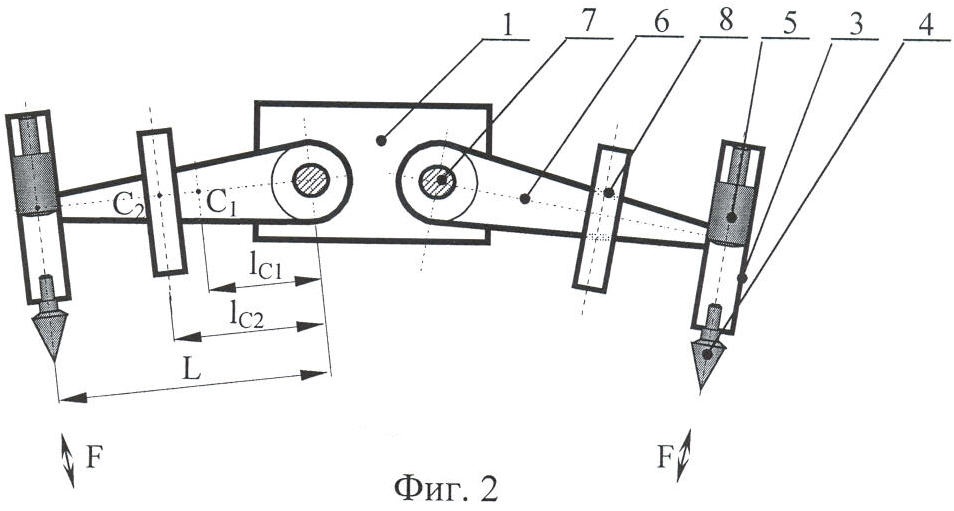
где L – расстояние от центра вращения балки до оси симметрии пневмомолота; Jo1 – момент инерции балки относительно оси вращения; Jо2 – момент инерции балансировочного груза относительно оси вращения; JС3 – момент инерции пневмомолота относительно центра масс; m1 – масса балки; m2 – масса балансировочного груза; lC1 – расстояние от оси вращения до центра масс балки; lC2 – расстояние от оси вращения балки до центра масс балансировочного груза. Для создания концентраторов напряжения в замкнутом объеме грунта и исключения центробежных сил инерции при работе рыхлитель снабжен дополнительной балкой с осью вращения, балансировочным грузом и пневмомолотом. Снабжение рыхлителя балкой с осью вращения, балансировочным грузом и пневмомолотом, расположенным на расстоянии Снабжение рыхлителя дополнительной балкой с осью вращения, пневмомолотом и балансировочным грузом позволяет компенсировать центробежные силы инерции, возникающие при вращении, а также создавать концентраторы напряжений в объеме грунта, заключенном между зубьями пневмомолотов и, тем самым, снизить энергоемкость процесса разрушения грунта. В совокупности указанные преимущества предлагаемого устройства по сравнению с прототипом позволяют увеличить передачу энергии динамических нагрузок в грунт, снизить их воздействие на базовую машину, уменьшить тяговое усилие. На фиг.1 изображен рыхлитель ударного действия, общий вид. На фиг.2, 3 – вид сверху на рабочий орган (верхняя часть рабочего органа условно не показана). Рыхлитель содержит базовую машину с навесной рамой 1, гидроцилиндр 2, пневмомолоты 3, содержащие зубья 4 и поршни-бойки 5, балки 6, соединенные осями 7 с навесной рамой 1, балансировочные грузы 8. На балке 6 расположены направляющие 9. Рыхлитель работает следующим образом. При опускании навесной рамы 1 гидроцилиндром 2 происходит касание зубьями 4 дневной поверхности грунта. Статическая нагрузка, действуя на зубья 4, приводит к подаче сжатого воздуха в полость между поршнем-бойком 5 и зубом 4 пневмомолотов 3 (поршни-бойки 5 в начальный момент времени находились в нижней части корпусов пневмомолотов 3). Усилие сжатого воздуха начинает ускоренно перемещать поршни-бойки 5 вверх. При этом силы отдачи воздействуют на корпус пневмомолотов 3, прижимая их к зубьям 4. Далее усилие передается на грунт, приводя его к разрушению. В момент ускоренного перемещения корпуса пневмомолота 3 вниз, сила инерции пневмомолота 3 и балки 6 воздействует на ось 7, соединяющую балку с навесной рамой 1. Аналогичная ситуация возникает и в случае, когда поршень-боек 5 при подъеме вверх силами сжатого воздуха ударяет о верхнюю часть корпуса пневмомолота 3. Но в этом случае сил реакции будет передаваться на ось 7 в противоположном направлении. При перемещении поршня-бойка 5 вниз, силы реакции давления сжатого воздуха действуют на корпус пневмомолота 3 и далее на балку 6, ось 7, навесную раму 1. Накопленная кинетическая энергия в момент касания поршнем-бойком 5 зуба 4 передается в грунт. Поочередное воздействие динамической нагрузки на ось 7 воздействует на базовую машину и оператора. Для исключения динамической составляющей усилия резания грунта на навесную раму 1, на балках 6 установлены балансировочные грузы 8. При этом положение пневмомолота 3 относительно оси вращения определяется из условия динамического равновесия (см., например, книгу Яблонского А.А. Курс теоретической механики. Ч.2. Динамика. Учебник для втузов. Изд. 5-е, испр. – М.: Высш. школа, 1977. – 430с. С.279-292). Полагая, что реакция в точке крепления балки 6 равна нулю, условие равновесия сил и моментов сил, включая силы инерции, может быть представлено следующей зависимостью:
где Jo – момент инерции вращающихся тел относительно оси вращения (балки 6 – Jo1, балансировочного груза 8 – Jo2 и пневмомолота – Jo3); В соответствии с теоремой о моментах инерции относительно параллельных осей (см., например, книгу Яблонского А.А. Курс теоретической механики. Ч.2. Динамика. Учебник для втузов. Изд. 5-е, испр. – М.: Высш. школа, 1977. – 430с. С.93-94), момент инерции пневмоударника 3 представим в следующем виде
где JС3– момент инерции пневмомолота 3 относительно центра масс. Ускорение центра масс вращающихся тел представим в следующем виде аС=
где lС1, lС2, lС3 – расстояние от оси вращения до центра масс, соответственно, балки 6, балансировочного груза 8 и пневмомолота 3. Расстояние от оси вращения до центра масс пневмомолота 3 lС3=L. С учетом полученных преобразований, формулы (1) и (2) примут вид
Решая совместно уравнения (3) и (4), получим
Для исключения центробежных сил инерции, возникающих при вращении балки 6 с пневмомолотом 3 и балансировочным грузом 8, а также разработке грунта в замкнутом объеме, на навесной раме 1 установлены дополнительная балка 6 с пневмомолотом 3 и балансировочным грузом 8. При работе в стесненных условиях одна из балок 6 вместе с пневмоударником 3 и балансировочным 8 грузом может убираться. Для работы рыхлителя в различных грунтовых условиях на балке 6 установлены направляющие 9, относительно которых могут перемещаться пневмомолот 3 и балансировочный груз 8. Применение предлагаемого рыхлителя позволяет повысить эффективность рыхления грунта за счет снижения тягового усилия и динамических нагрузок, воздействующих на базовую машину, и передачи их в зону разрушения грунта.
Формула изобретения
Рыхлитель ударного действия, включающий базовую машину, навесную раму, гидроцилиндр и пневмомолот, содержащий корпус с установленным внутри поршнем-бойком и зубом, отличающийся тем, что он снабжен, по меньшей мере, одной балкой, соединенной с навесной рамой при помощи оси вращения и балансировочным грузом, при этом пневмомолот и балансировочный груз установлены на балке с возможностью перемещения, а расстояние от оси вращения балки до оси симметрии пневмомолота определяется из условия
РИСУНКИ
|
||||||||||||||||||||||||||
 574534, М. кл. Е21С 37/02, 1974 г.).
574534, М. кл. Е21С 37/02, 1974 г.).
 от оси, причем балансировочный груз и пневмомолот установлены с возможностью перемещения относительно балки, позволяет максимально снизить передачу динамических нагрузок на базовую машину.
от оси, причем балансировочный груз и пневмомолот установлены с возможностью перемещения относительно балки, позволяет максимально снизить передачу динамических нагрузок на базовую машину.

 – угловое ускорение балки 6; F – усилие, возникающее при работе пневмоударника; L – расстояние от оси вращения рычага до оси симметрии пневмомолота 3; М – масса вращающихся тел (балки 6 – m1, балансировочного груза 8 – m2 и пневмомолота 3 – m3); ас – ускорение центра масс вращающихся тел.
– угловое ускорение балки 6; F – усилие, возникающее при работе пневмоударника; L – расстояние от оси вращения рычага до оси симметрии пневмомолота 3; М – масса вращающихся тел (балки 6 – m1, балансировочного груза 8 – m2 и пневмомолота 3 – m3); ас – ускорение центра масс вращающихся тел.