Патент на изобретение №2380259
|
||||||||||||||||||||||||||
(54) СПОСОБ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ ЖЕЛЕЗНОДОРОЖНЫХ РЕЛЬСОВ В ПРОЦЕССЕ ДВИЖЕНИЯ ПОДВИЖНОГО СОСТАВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
(57) Реферат:
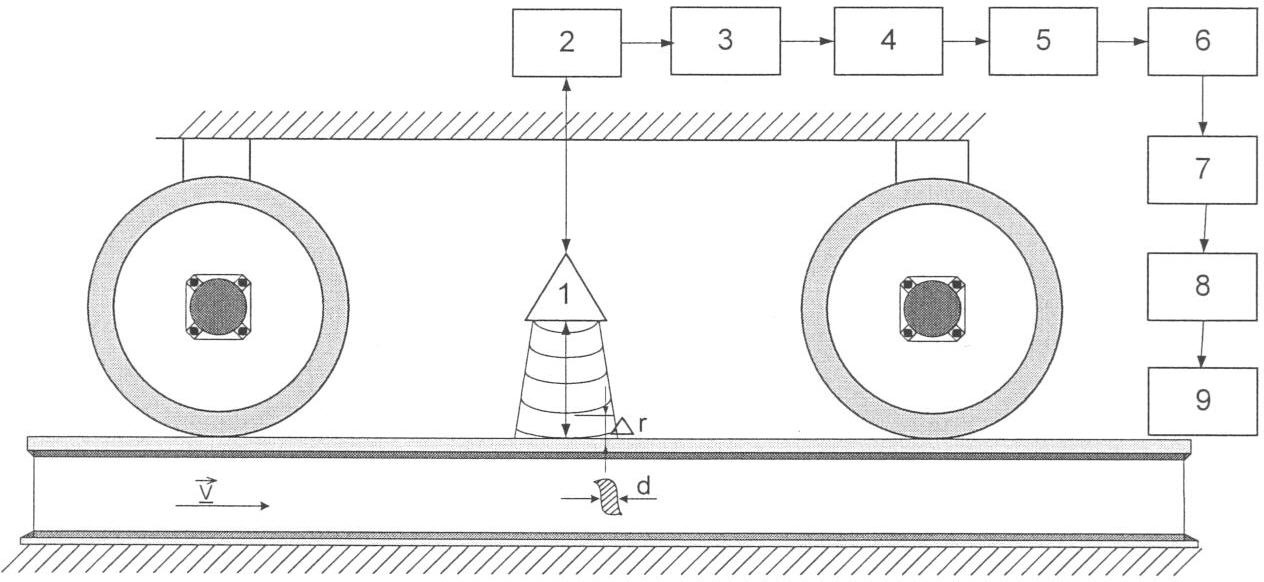
Изобретение относится к области приборостроения. Устройство для бесконтактного получения информации о внутренних дефектах рельса при любой глубине их расположения внутри рельса содержит генератор СВЧ, детектор, индикатор, антенну, последовательно соединенные фильтр нижних частот, усилитель сигнала, аналого-цифровой преобразователь, запоминающее устройство и нейрокомпьютер. В качестве генератора СВЧ используется автодинный приемопередатчик, который соединен с антенной и с входом детектора, а выход нейрокомпьютера подключен к индикатору. В процессе движения подвижного состава вибрирующая поверхность рельса облучается электромагнитными волнами СВЧ диапазона, отражаясь от которой, СВЧ электромагнитные волны принимаются приемопередающей антенной. Путем фазового детектирования выделяется сигнал, содержащий информацию о параметрах вибрации рельса, который сравнивается с эталонными сигналами, хранящимися в памяти устройства. Для принятия решения о дефектах в рельсе используется схема сравнения на основе нейрокомпьютерного алгоритма. Достигается повышение производительности контроля. 2 н.з. ф-лы, 1 ил.
Изобретение относится к области приборостроения и может использоваться для диагностики технического состояния рельсов на железнодорожном транспорте. Существующие способы для контроля рельсов на железнодорожном транспорте основаны на применении ультразвука (см. Неразрушающий контроль рельсов при их эксплуатации и ремонте / А.К.Гурвич, Б.П.Довнар, Г.А.Круг. – М.: Транспорт, 1983, – 318 с.). Используются теневой, зеркально-теневой, эхо-импульсный способы. Основными недостатками ультразвукового способа дефектоскопии рельсов являются низкая скорость и оперативность контроля, необходимость обеспечения хорошего физического контакта между контролируемым материалом и пьезоэлектрическим преобразователем при помощи жидкости («мокрый метод»), ложная регистрация дефектов (особенно подвержены воздействию ложных факторов мобильные средства – автомотрисы, вагоны-дефектоскопы), плюс наличие человеческого фактора (психофизическое состояние, квалификация и навыки операторов) при проведении испытаний. Существенным недостатком «мокрого» ультразвукового контроля являются высокие эксплуатационные расходы. Пьезоэлектрические преобразователи в процессе дефектоскопии истираются и выходят из строя. По своей конструкции они не восстанавливаемы. Известен бесконтактный способ неразрушающего контроля железнодорожных рельсов в движении, например, вихретоковый способ контроля для измерения износа боковой поверхности головки рельса (патент РФ Также известен акустический способ обнаружения неисправности рельсового пути в процессе движения состава по железной дороге (патент РФ Известно устройство для измерения вибрации (патент РФ Наиболее близким к заявляемому способу является способ, который используется в измерителе вибрации (патент РФ Наиболее близким к заявляемому устройству является устройство для измерения вибрации (патент РФ 2082114 C1, 1997.06.20), которое содержит генератор СВЧ, детектор с подключенным к нему индикатором и антенну в виде круглого волновода. Недостатком данного устройства является то, что при использовании его для контроля в движении на высокой скорости среднее расстояние между антенной и объектом контроля (рельсом) остается неизменным, поэтому выбрать максимальную чувствительность метода путем выбора оптимального расстояния между антенной и объектом контроля не представляется возможным. В основу изобретения положена задача бесконтактного получения информации о внутренних дефектах рельса при любой глубине их расположения внутри рельса, а также повышение производительности контроля. Поставленная задача решается тем, что в способе неразрушающего контроля железнодорожных рельсов в процессе движения подвижного состава, по которому на рельс воздействуют СВЧ электромагнитным полем и извлекают информацию о его дефектах, согласно изобретению, воздействие СВЧ электромагнитным полем осуществляют автодинным приемо-передатчиком и из смеси облучающего и отраженного СВЧ электромагнитного поля путем фазовой демодуляции получают информационные параметры, по которым судят об интегральных дефектах рельсов. Поставленная задача решается тем, что устройство для осуществления способа неразрушающего контроля железнодорожных рельсов в процессе движения подвижного состава, включающее генератор СВЧ, детектор, индикатор и антенну, согласно изобретению, дополнительно содержит последовательно соединенные фильтр нижних частот, усилитель сигнала, аналого-цифровой преобразователь, запоминающее устройство и нейрокомпьютер, при этом в качестве генератора СВЧ использован автодинный приемопередатчик, который соединен с антенной и со входом детектора, а выход нейрокомпьютера подключен к индикатору. Акустические колебания, возникающие в рельсе при движении подвижного состава, распространяясь внутри рельса, претерпевают многократное отражение от несплошностей и граней рельсового фрагмента, интерферируют друг с другом и достигают поверхности рельса, заставляя ее вибрировать соответствующим образом. Причем параметры вибрации по частотному спектру и временной структуре будут отличны от регулярных колебаний, свойственных исправному состоянию рельсового пути. На фиг.1 представлена блок-схема устройства для осуществления заявляемого способа, которое содержит последовательно соединенные открытую приемопередающую антенну 1, автодинный приемопередатчик 2, фазовый детектор 3, фильтр нижних частот (ФНЧ) 4, усилитель сигнала 5, аналого-цифровой преобразователь (АЦП) 6, оперативно-запоминающее устройство (ОЗУ) 7, аппаратно-программный блок обработки сигнала (нейрокомпьютер) 8 и индикатор 9. Данное устройство устанавливается на раме тележки подвижного состава. Во время движения подвижного состава вибрирующая поверхность рельса облучается электромагнитными волнами СВЧ диапазона, например 10ГГц. Электромагнитная волна излучается приемопередающей антенной 1, на которую поступает сигнал заданной частоты от автодинного приемо-передатчика 2. Излученная приемопередающей антенной 1 электромагнитная волна проникает в приповерхностный слой рельса на глубину, ограниченную скин-слоем. На поверхности металла электромагнитная волна модулируется параметрами вибрации в рельсе и, переизлучаясь обратно в пространство, регистрируется приемопередающей антенной 1 и поступает на вход автодинного приемопередатчика 2. Далее сигнал поступает на вход фазового детектора 3, где путем фазового детектирования выделяется информация о вибрации поверхности рельса из параметров разностного сигнала между облучающим и отраженным радиосигналами. Разностная частота при этом равна FP=2 fГ – частота облучающей СВЧ электромагнитной волны; fП – частота отраженной СВЧ электромагнитной волны. Принципиальным является модуляция фазового параметра отраженной СВЧ электромагнитной волны, поскольку фаза электромагнитной волны непосредственно переносит информацию об особенностях дефекта рельса, заключенную в его вибрациях при движении подвижного состава. Фазовый сдвиг отраженного сигнала, возникающий за счет вибрации рельса, оценивается, как
При малых величинах Сигнал на приемопередающей антенне описывается, как
Um – амплитуда сигнала;
С выхода фазового детектора 3 сигнал поступает на фильтр нижних частот 4, с выхода которого поступает на вход усилителя сигнала 5 и, усиливаясь, поступает на вход аналого-цифрового преобразователя 6, где преобразовывается в цифровую форму, после чего в цифровой форме запоминается оперативно-запоминающим устройством ОЗУ 7. Из ОЗУ 7 сигналы поочередно считываются и поступают на многовходовый порт аппаратно-программного блока обработки сигнала (нейрокомпьютера) 8, реализуемого на базе микроконтроллера. Программная обработка и интерпретация полезного сигнала осуществляется при помощи обучаемого нейрокомпьютерного алгоритма (например, Ф.Уоссермен Нейрокомпьютерная техника: теория и практика, /пер. с англ./ – М.: Мир, 1992. – 240 с.). На этом этапе происходит непосредственное обнаружение и идентификация типа дефекта в сварном стыке. В состав нейрокомпьютера входит модуль памяти, в котором в цифровой форме хранятся эталонные веса сигналов, являющиеся результатом «обучения» этого нейрокомпьютера в процессе экспериментальных работ, в результате чего формируется компьютерная база данных о типовых дефектах в рельсе. Соответственно, чем больше в памяти находится информации о различных по форме и размерам дефектах, тем более точную качественную оценку можно получить о состоянии объекта контроля по сигналу на входе. Принятие решения нейрокомпьютером по каждому конкретному дефекту базируется не на единичном сравнении, а на основе сравнительного анализа входного сигнала и статистических данных, полученных эмпирически и хранимых во встроенном модуле памяти (например, модуль на основе Flash-памяти). Для того чтобы принять решение о дефектном состоянии рельса, необходимо определить корреляционную взаимосвязь сигналов с эталонами, хранящимися в модуле памяти нейрокомпьютера. Сравнение сигналов осуществляется на основе нейрокомпьютерного алгоритма. Результат выводится на индикатор 9. Предложенный способ в отличие от известных является полностью бесконтактным и, благодаря радиолокационному методу регистрации, обеспечивает контроль в движении на высокой скорости. При этом устройство для осуществления заявляемого способа может быть смонтировано на раме тележки любого штатного подвижного средства – электровоза, вагона, автомотрисы и т.д. Кроме того, отпадает необходимость в использовании оборудования для возбуждения ультразвуковых колебаний в рельсе, что снижает стоимость устройств, используемых для осуществления заявляемого способа контроля.
Формула изобретения
1. Способ неразрушающего контроля железнодорожных рельсов в процессе движения подвижного состава, по которому на рельс воздействуют СВЧ электромагнитным полем и извлекают информацию о его дефектах, отличающийся тем, что воздействие СВЧ электромагнитным полем осуществляют автодинным приемопередатчиком, а из смеси облучающего и отраженного СВЧ электромагнитного поля путем фазовой демодуляции получают информационные параметры, по которым судят о дефектах рельса. 2. Устройство для осуществления способа неразрушающего контроля железнодорожных рельсов в процессе движения подвижного состава, включающее генератор СВЧ, детектор, индикатор и антенну, отличающееся тем, что оно дополнительно содержит последовательно соединенные фильтр нижних частот, усилитель сигнала, аналого-цифровой преобразователь, запоминающее устройство и нейрокомпьютер, при этом в качестве генератора СВЧ использован автодинный приемопередатчик, который соединен с антенной и с входом детектора, а выход нейрокомпьютера соединен с индикатором.
РИСУНКИ
|
||||||||||||||||||||||||||
 2236971 С2, 2002.07.16). Для реализации данного способа применяется устройство, которое устанавливается в вагоне-путеизмерителе с ходовой тележкой. После установки на неподрессоренной раме ходовой тележки вагона-путеизмерителя датчиков в исходное положение и включения питания устройства генератор напряжения начинает вырабатывать высокочастотное напряжение, которое с его выхода одновременно поступает на вход датчика износа боковой поверхности головки рельса. Возникшее при этом электромагнитное поле, взаимодействует с контролируемым рельсом, создавая в приповерхностной области головки рельса вихревые токи, плотность которых зависит от геометрической формы и размеров головки рельса. Электромагнитное поле вихревых токов воздействует на датчик, наводя в нем пропорциональную этим токам ЭДС, в результате чего на выходах датчика появляется соответствующее выходное напряжение, величина которого позволяет судить о дефектности головки рельса. Данный способ позволяет производить контроль на любой скорости. Основным его недостатком является ограниченная способность определять дефекты в глубине рельса. Регистрируются дефекты на глубине не более 6-8 мм.
2236971 С2, 2002.07.16). Для реализации данного способа применяется устройство, которое устанавливается в вагоне-путеизмерителе с ходовой тележкой. После установки на неподрессоренной раме ходовой тележки вагона-путеизмерителя датчиков в исходное положение и включения питания устройства генератор напряжения начинает вырабатывать высокочастотное напряжение, которое с его выхода одновременно поступает на вход датчика износа боковой поверхности головки рельса. Возникшее при этом электромагнитное поле, взаимодействует с контролируемым рельсом, создавая в приповерхностной области головки рельса вихревые токи, плотность которых зависит от геометрической формы и размеров головки рельса. Электромагнитное поле вихревых токов воздействует на датчик, наводя в нем пропорциональную этим токам ЭДС, в результате чего на выходах датчика появляется соответствующее выходное напряжение, величина которого позволяет судить о дефектности головки рельса. Данный способ позволяет производить контроль на любой скорости. Основным его недостатком является ограниченная способность определять дефекты в глубине рельса. Регистрируются дефекты на глубине не более 6-8 мм. ·(fГ·fП), где
·(fГ·fП), где , где
, где r(
r( ) – амплитуда вибраций рельса в зависимости от их частоты
) – амплитуда вибраций рельса в зависимости от их частоты  – длина облучающей СВЧ электромагнитной волны.
– длина облучающей СВЧ электромагнитной волны. отраженная СВЧ электромагнитная волна будет иметь амплитудную модуляцию с индексом, соответствующим
отраженная СВЧ электромагнитная волна будет иметь амплитудную модуляцию с индексом, соответствующим 
 – рабочая частота СВЧ электромагнитной волны,
– рабочая частота СВЧ электромагнитной волны,