Патент на изобретение №2379209
|
||||||||||||||||||||||||||
(54) УСТРОЙСТВО ФИКСАЦИИ ПРОХОЖДЕНИЯ КОЛЕСНОЙ ПАРЫ
(57) Реферат:
Изобретение относится к организации и управлению движением на железных дорогах, в частности к путевым устройствам, взаимодействующим с поездом, и может быть использовано в различных автоматизированных системах. Устройство фиксации прохождения колесной пары состоит из размещенного дистанционно источника питания (12), канала передачи сигнала прохождения колесной пары (11), высокочастотного генератора (6), передающего устройства (7), приемного устройства (10), циркулятора (8) и узконаправленной приемо-передающей антенны (9). При этом выход высокочастотного генератора соединен с первым входом передающего устройства, выход которого соединен с первым выводом циркулятора, второй вывод которого соединен с узконаправленной приемопередающей антенной, а третий вывод циркулятора соединен с первым входом приемного устройства, выход которого соединен с первым входом канала передачи сигнала прохождения колесной пары. Также выход размещенного дистанционно источника питания соединяется со входом высокочастотного генератора, со вторым входом передающего устройства, со вторым входом приемного устройства и вторым входом канала передачи сигнала прохождения колесной пары. Технический результат заключается в повышении надежности устройства, в повышении достоверности выходной информации, в обеспечении универсальности. 3 з.п. ф-лы, 10 ил.
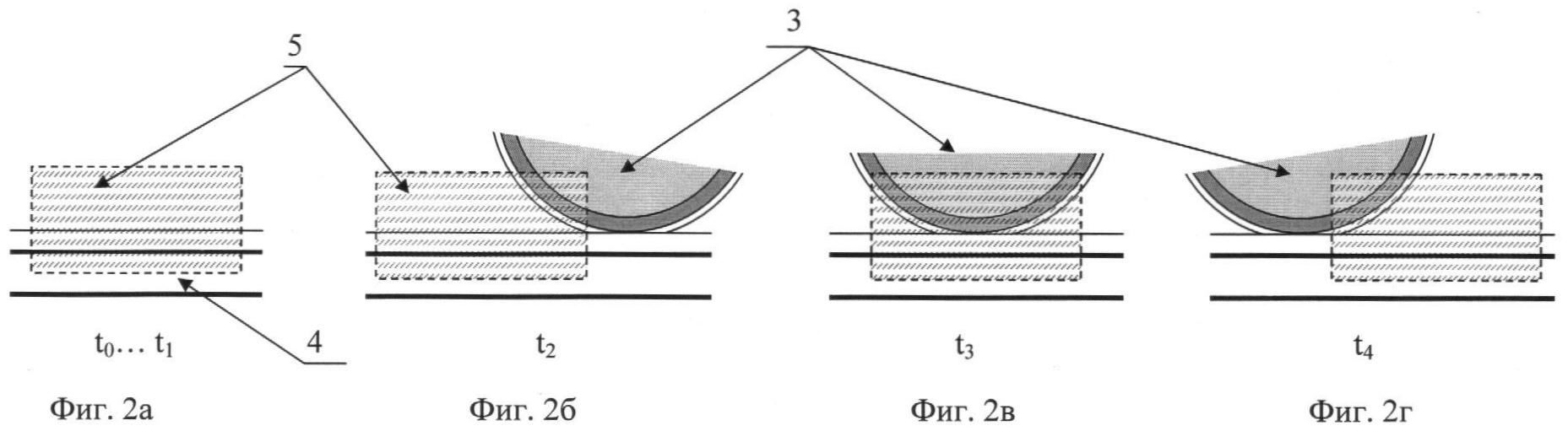
Изобретение относится к организации и управлению движением на железных дорогах, в частности к путевым устройствам, взаимодействующим с поездом, и может быть использовано в различных автоматизированных системах. Известен датчик счета колес, включающий индуктивный путевой датчик фиксации прохождения колесной пары, находящийся в непосредственной близости от рельса, и стабилизатор напряжения, расположенные вблизи рельса в зоне движения реборды колеса, подключенные через согласующий элемент посредством двухпроводной соединительной линии источника питания к дистанционно подсоединенным источнику питания и устройствам обработки и приема информации от датчика (патент РФ Наиболее близким является устройство фиксации прохождения колесной пары, включающее индуктивный путевой датчик фиксации прохождения колесной пары, расположенный вблизи рельса в зоне движения реборды колеса (патент РФ Недостатком известных устройств фиксации прохождения колесной пары является низкая помехозащищенность, так как основным элементом устройств является магнитные катушки, размещенные в непосредственной близости от рельса в зоне движения реборды колеса. Различные предлагаемые технические решения, направленные на повышение достоверности считывания, ведут к значительному усложнению самих устройств, что в значительной мере снижает их надежность. Предлагаемое изобретение, способ фиксации прохождения колесной пары и устройство фиксации прохождения колесной пары решает задачу создания способа и соответствующего устройства, осуществление которого обеспечивает достижение технического результата, заключающегося в повышении надежности устройства, в повышении достоверности выходной информации, в обеспечении универсальности. Технический результат достигается за счет отказа от использования магнитных катушек и применения электромагнитных волн высокочастотного диапазона. Данное техническое решение позволяет также получить дополнительный технический эффект: – контроль прохождения колесной пары на любых скоростях железнодорожного транспортного средства; – возможность определения остановки колесной пары в зоне контроля прохождения колесной пары; – расположение устройства на безопасном расстоянии от рельса; – определение скорости транспортного средства; – функцию самоконтроля. На фиг.1а-1в показано размещение устройства фиксации прохождения колесной пары относительно головки рельса и диаграммы направленности в вертикальной и горизонтальной плоскостях. На фиг.2а-2д показан принцип работы предлагаемого технического решения. На фиг.3 показан вариант исполнения устройства фиксации прохождения колесной пары. На фиг.4 показан вариант исполнения устройства фиксации прохождения колесной пары с блоком управления. Сущность способа состоит в следующем. Передающее 7 устройство, расположенное на безопасном расстоянии от рельса 4, облучает высокочастотным остронаправленным сигналом, имеющим диаграмму 2 направленности, зону 5 контроля над рельсом 4, по которому движется колесо 3 колесной пары железнодорожного транспортного средства. При облучении зоны 5 контроля на вход приемного 10 устройства будет поступать отраженный от различных предметов, находящихся в зоне диаграммы 2 направленности узконаправленной 9 приемо-передающей антенны, сигнал. На выходе приемного 10 устройства после амплитудного детектирования будет присутствовать низкочастотный информационный сигнал напряжением U1 (площадь отражающей поверхности S0, временной интервал t0 В случае остановки транспортного средства данный сигнал останется постоянным и максимальным. Кроме того, мощностью излучаемого высокочастотного узконаправленного сигнала можно регулировать расстояние, на котором определяется колесо колесной пары. Для определения колеса колесной пары, расположенной только на ближайшем пути, необходимо обеспечить такую излучаемую мощность на выходе узконаправленной 9 приемо-передающей антенны, чтобы обеспечить на входе приемного 10 устройства уровень мощности, отраженный от колеса колесной пары, находящейся на втором и далее путях, менее чувствительности приемного 10 устройства. Конкретный уровень излучаемой мощности высокочастотного узконаправленного сигнала зависит от частоты несущей и расстояния узконаправленной 9 приемо-передающей антенны до ближайшего рельса. Данный способ не имеет ограничений и по максимальной скорости движения железнодорожных транспортных средств, что позволяет использовать данный способ на высокоскоростных магистралях. Рассмотрим устройство фиксации прохождения колесной пары, реализующий данный способ. Устройство 1 фиксации прохождения колесной пары состоит из высокочастотного 6 генератора, выход которого соединен со входом передающего 7 устройства, нагруженного на первый вывод циркулятора 8, который является входом, второй вывод циркулятора 8, который является двунаправленным, соединен с узконаправленной 9 приемо-передающей антенной. Третий вывод, который является выходом циркулятора 8, соединен со входом приемного 10 устройства, выход которого, в свою очередь, соединен со входом канале 11 передачи сигнала прохождения колесной пары. Высокочастотный 6 генератор, передающее 7 устройство, приемное 10 устройство и канал 11 передачи сигнала прохождения колесной пары имеют вторые входы для подачи напряжения питания с выхода размещенного дистанционно источника 12 питания. Устройство 1 фиксации прохождения колесной пары работает следующим образом. После подачи напряжения питания с размещенного дистанционно источника 12 питания происходит возбуждение высокочастотного 6 генератора, который генерирует монохромный сигнал. Частота генерации может находиться в любом высокочастотном диапазоне, например в разрешенных диапазонах 868 МГц или 2,45 ГГц. Далее сигнал поступает на передающее 7 устройство, где монохромный сигнал усиливается до необходимого уровня и поступает через циркулятор 8 на узконаправленную 9 приемо-передающую антенну, которая в соответствии со своей диаграммой 2 направленности формирует высокочастотный узконаправленный сигнал в сторону зоны 5 контроля. Узконаправленная 9 приемо-передающая антенна имеет узкую диаграмму 2 направленности, чтобы обеспечить зону 5 контроля, в которую попадает нижняя часть колеса 3 колесной пары. При этом в зону 5 контроля не должны попадать элементы подвески и другие металлические части вагона. При облучении зоны 5 контроля на вход приемного 10 устройства через узконаправленную 9 приемо-передающую антенну и циркулятор 8 будет поступать сигнал, отраженный от различных предметов, находящихся в зоне диаграммы 2 направленности узконаправленной 9 приемо-передающей антенны. Приемное 10 устройство осуществляет амплитудное детектирование отраженного сигнала, и на его выходе появится низкочастотный информационный сигнал, пропорциональный амплитуде высокочастотного сигнала, поступающего на вход приемного 10 устройства. С выхода приемного 10 устройства низкочастотный информационный сигнал поступает на вход канала 11 передачи сигнала прохождения колесной пары для передачи его для дальнейшей обработки. Узконаправленная 9 приемо-передающая антенна устройства 1 фиксации прохождения колесной пары располагается по высоте на уровне головки рельса 4 таким образом, что бы избежать отражения от второго и последующего рельсов (фиг.1в). При этом с целью уменьшения влияния эффекта Доплера на обработку отраженного сигнала целесообразно ось максимума диаграммы направленности узконаправленной 9 приемо-передающей антенны направлять перпендикулярно плоскости колеса 3 колесной пары. В рассматриваемом варианте (фиг.2) зона 5 контроля захватывает часть рельса 4. Это не принципиально, но такое расположение зоны 5 контроля позволяет реализовать функцию самоконтроля устройства 1 фиксации прохождения колесной пары, которое состоит в следующем. При подаче напряжения с размещенного дистанционно источника 12 питания только на приемное 10 устройство имитируется отсутствие на его входе какого-либо входного отраженного сигнала. В этом случае на выходе приемного 10 устройства будет постоянное напряжение U0. Подача напряжения на высокочастотный 6 генератор и передающее 7 устройство в отсутствие колеса 3 колесной пары в зоне 5 контроля приведет к появлению на входе приемного 10 устройства отраженного от рельса высокочастотного сигнала, который, в свою очередь, приведет к появлению на выходе приемного 10 устройства низкочастотного информационного сигнала с напряжением U1>U0 (площадь отражающей поверхности S0, временной интервал t0 С целью уменьшения влияния перепадов питающего напряжения на параметры сигнала непосредственно в устройство введен стабилизатор напряжения, при этом вход стабилизатора напряжения соединен с выходом размещенного дистанционно источника 12 питания, а выход стабилизатора напряжения соединен со входами питания элементов устройства, а именно: со входом высокочастотного 6 генератора, со вторым входом передающего 7 устройства, со вторым входом приемного 10 устройства и вторым входом канала 11 передачи сигнала прохождения колесной пары. Кроме стабилизации напряжения, стабилизатор напряжения выполняет функции фильтрации помех, поступающих по цепям питания от размещенного дистанционно источника 12 питания. В случае подачи напряжения питания на устройство фиксации прохождения колесной пары в виде переменного напряжения 220 вольт или любого другого переменного напряжения в устройство вводится понижающий трансформатор питания и выпрямительный блок, при этом выход размещенного дистанционно источника 12 питания соединен со входом последовательно соединенных понижающего трансформатора питания и выпрямительного блока, выход которого соединен со входом высокочастотного 6 генератора, со вторым входом передающего 7 устройства, со вторым входом приемного 10 устройства и вторым входом канала 11 передачи сигнала прохождения колесной пары. Так как сигнал, генерируемый высокочастотным 6 генератором и излучаемый узконаправленной 9 приемо-передающей антенной является узкополосным немодулируемым сигналом, а изменения отраженного от колеса колесной пары сигнала за счет эффекта Доплера нет, то для уменьшения влияния внешних помех, поступающих по радиоканалу, в устройство вводится узкополосный фильтр, вход которого соединен с третьим выводом циркулятора 8, а выход соединен с первым входом приемного 10 устройства. Для расширения функциональных задач устройство фиксации прохождения колесной пары может содержать блок 13 управления. Блок 13 управления может использоваться для решения следующих задач: – управление режимами высокочастотного 6 генератора, передающего 7 устройства, приемного 10 устройства и канала 11 передачи сигнала прохождения колесной пары; – тестирование устройства фиксации прохождения колесной пары; – реализация функции самоконтроля устройства фиксации прохождения колесной пары. – контроль напряжения источника 12 питания; – подключение резервного источника питания; – управление питанием блоков и узлов устройства фиксации прохождения колесной пары; – кодирование сигналов прохождения колесной пары с целью повышения помехозащищенности каналу 11 передачи сигнала прохождения колесной пары; – привязывание сигналов прохождения колесной пары к шкале времени (абсолютной и относительной); – выполнение цифровой фильтрации принятых с приемного 10 устройства сигналов; – осуществление любой обработки отраженного и демодулированного сигнала, алгоритм которой можно задать программно (например, корреляционную обработку или измерение длительности сигнала с целью определения скорости или направления движения колеса). На фиг.4 показан вариант исполнения устройства фиксации прохождения колесной пары с блоком 13 управления, включение которого позволяет выключать питание различных блоков и узлов устройства фиксации прохождения колесной пары в зависимости от сигналов управления, поступающих по каналу 11 передачи сигнала прохождения колесной пары, которые могут формироваться, например, от сигналов рельсовой цепи (есть транспортное средство на определенном участке пути или нет). Кроме того, при данном включении блок 13 управления может контролировать напряжение питания, поступающее с источника 12 питания. В случае снижения напряжения ниже допустимого или в случае его исчезновения блок 13 управления может включать резервный блок питания (на фиг.4 не показан). Высокочастотный 6 генератор может быть выполнен по любой известной схеме, например, в виде кварцевого генератора с умножителями частоты или в виде синтезатора. Передающее 7 устройство может быть выполнено в качестве усилителя мощности по любой известной схеме. Циркулятор 8, предназначенный для развязки передающего и приемного каналов при работе на одну антенну, может быть выполнен, например, по патентам РФ Приемное 10 устройство может быть выполнено, например, по патенту РФ Канал 11 передачи сигнала прохождения колесной пары может быть выполнен, например, в виде стандартного модема. Узконаправленная 9 приемо-передающая антенна может быть выполнена, например, в виде рупорной или микрополосковой антенны, с диаграммой 2 направленности с углом 2 Блок 13 управления может быть выполнен в виде, например, микропроцессорного устройства. Применение конкретного микропроцессора будет зависеть от решаемых задач. Например, для решения задач определения скорости необходимо АЦП, встроенное или внешнее. Размещенный дистанционно источник 12 питания может быть выполнен как в виде источника постоянного тока, так и источника переменного тока. Таким образом, предлагаемые способ фиксации прохождения колесной пары и устройство его реализующее, по сравнению с прототипами и другими техническими решениями обеспечивают повышение надежности устройства, достоверности выходной информации и универсальность применение.
Формула изобретения
1. Устройство фиксации прохождения колесной пары, состоящее из размещенного дистанционно источника питания и канала передачи сигнала прохождения колесной пары, отличающееся тем, что в устройство вводится высокочастотный генератор, передающее устройство, приемное устройство, циркулятор и узконаправленная приемопередающая антенна, при этом выход высокочастотного генератора соединен с первым входом передающего устройства, выход которого соединен с первым выводом циркулятора, второй вывод которого соединен с узконаправленной приемопередающей антенной, а третий вывод циркулятора соединен с первым входом приемного устройства, выход которого соединен с первым входом канала передачи сигнала прохождения колесной пары, при этом выход размещенного дистанционно источника питания соединяется со входом высокочастотного генератора, со вторым входом передающего устройства, со вторым входом приемного устройства и вторым входом канала передачи сигнала прохождения колесной пары. 2. Устройство по п.1, отличающееся тем, что в устройство введен стабилизатор напряжения, причем вход стабилизатора напряжения соединен с выходом размещенного дистанционно источника питания, а выход соединен со входом высокочастотного генератора, со вторым входом передающего устройства, со вторым входом приемного устройства и вторым входом канала передачи сигнала прохождения колесной пары. 3. Устройство по п.1, отличающееся тем, что устройство может содержать понижающий трансформатор питания и выпрямительный блок, при этом выход размещенного дистанционно источника питания соединен со входом последовательно соединенных понижающего трансформатора питания и выпрямительного блока, выход которого соединен со входом высокочастотного генератора, со вторым входом передающего устройства, со вторым входом приемного устройства и вторым входом канала передачи сигнала прохождения колесной пары. 4. Устройство по п.1, отличающееся тем, что в устройство вводится узкополосный фильтр, вход которого соединен с третьим выводом циркулятора, а выход соединен с первым входом приемного устройства.
РИСУНКИ
|
||||||||||||||||||||||||||
 2089424, 10.09.97, B61L 1/16).
2089424, 10.09.97, B61L 1/16). t1, фиг.2а и 2д). После появления в зоне 5 контроля колеса 3 колесной пары отражающая поверхность будет увеличиваться (временной интервал t1
t1, фиг.2а и 2д). После появления в зоне 5 контроля колеса 3 колесной пары отражающая поверхность будет увеличиваться (временной интервал t1