Патент на изобретение №2378613
|
||||||||||||||||||||||||||
(54) БЕСКОНТАКТНЫЙ ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ ВАЛА
(57) Реферат:
Изобретение относится к измерительной технике, а именно к устройствам преобразования углового положения вала в электрический сигнал. Технический результат: снижение нелинейности выходной характеристики датчика, повышение ее стабильности в условиях наличия производственных погрешностей изготовления деталей, их износа в процессе эксплуатации датчика, влияния внешних магнитных полей и близкорасположенных предметов из ферромагнитных материалов, а также повышение чувствительности датчика к углу поворота вала. Сущность: датчик содержит магниточувствительный элемент 1, расположенный неподвижно в центре кольцевого ротора-магнита 2. Ротор-магнит намагничен радиально со спаданием поля от центра к краям полуколец, при этом у одного его полукольца векторы индукции направлены наружу, а у другого вовнутрь. Направление чувствительности магниточувствительного элемента лежит в плоскости ротора-магнита. Во внутренней полости ротора-магнита неподвижно и симметрично размещены два одинаковых сегмента-магнитопровода 3, образующие немагнитные зазоры с ротором-магнитом и эквидистантную немагнитную щель между собой, перпендикулярную направлению чувствительности магниточувствительного элемента. Вся конструкция помещена соосно в цилиндрический магнитный экран 4. 8 ил.
Данное изобретение относится к линейным электронным устройствам преобразования углового положения вала в электрический сигнал и может быть использовано в различных системах измерения угловых величин, например в измерительных системах автомобиля. Известно простое линейное устройство преобразования углового положения вала в выходное напряжение, представляющее собой потенциометр, на который подано постоянное напряжение, а выходной сигнал снимается с движка потенциометра [1]. Подобный датчик обладает высокой линейностью преобразования, но из-за износа трущихся подвижной и неподвижной частей недолговечен. Кроме того, непостоянство контакта этих частей при повороте вала приводит к появлению шума в выходном сигнале. Известен бесконтактный датчик углового положения вала [1], содержащий намагниченный радиально цилиндрический ротор-магнит и расположенный снаружи, рядом с его цилиндрической стенкой, неподвижный магниточувствительный элемент, направление чувствительности которого перпендикулярно оси вращения ротора-магнита и пересекает ее. Кроме того, собственная ось ротора-магнита и ось его вращения рассовмещены, но параллельны друг другу, что позволяет получить зависимую от угла поворота величину зазора между ротором-магнитом и чувствительным элементом. При соответствующем выборе размеров деталей конструкции здесь можно достичь нелинейности выходной характеристики датчика менее 1%. Однако из-за малого расстояния между ротором-магнитом и магниточувствительным элементом, обеспечивающего достаточную для работы магниточувствительного элемента крутизну изменения магнитного поля в точке его расположения, погрешности изготовления деталей и нестабильность закона изменения зазора между магниточувствительным элементом и ротором-магнитом приводят к нестабильности выходной характеристики. Так, например, при зазоре 5 мм и смещении оси вращения ротора-магнита вследствие неточности изготовления и/или износа деталей датчика на величину 0,1 мм относительное отклонение выходного сигнала от исходного значения составит 0,1/5·100=2%. Таким образом, срок службы такого датчика существенно ограничен естественным процессом износа деталей. Известны бесконтактные датчики углового положения вала, содержащие линейный (например, в виде параллелепипеда) или кольцевой ротор-магнит и неподвижный магниточувствительный элемент, реагирующий на угловое положение вектора магнитной индукции в плоскости, совпадающей с направлением чувствительности магниточувствительного элемента [2]. В этих датчиках используется совместная обработка синусоидального и косинусоидального сигнала магниточувствительного элемента, а зависимость выходного сигнала от величины магнитной индукции устранена. Благодаря этому линейность характеристики датчиков и ее стабильность высокие. Но из-за сложной процедуры математической обработки сигналов магниточувствительного элемента стоимость таких датчиков относительно высокая. Известен также наиболее близкий к заявляемому и принятый в качестве прототипа бесконтактный датчик углового положения вала, имеющий следующие общие с заявляемым датчиком существенные признаки, а именно: соосный с валом кольцевой ротор-магнит, намагниченный поперек оси так, что у одного его полукольца векторы индукции направлены наружу, а у другого – вовнутрь, а также расположенный неподвижно в центре его внутренней полости магниточувствительный элемент, направление чувствительности которого лежит в плоскости ротора-магнита [1]. Эти признаки являются также достаточными признаками для полного описания прототипа. Этот датчик мало чувствителен к смещению оси ротора-магнита, поскольку магнитное поле в центральной его области однородно. К недостаткам данного датчика следует отнести наличие синусоидальной зависимости выходного сигнала от угла поворота вала. Нелинейность характеристики такого датчика обычно не лучше 6% в диапазоне углов поворота вала ~90 градусов. Для доказательства этого ниже приведен расчет нелинейности датчика-прототипа, преобразующего значения проекции вектора магнитной индукции на направление чувствительности магниточувствительного элемента в выходное напряжение, изменяющееся в диапазоне от 0,52 до 4,4 вольта при изменении углов поворота вала от -45 до +45 градусов относительно направления, перпендикулярного направлению чувствительности. Для идеально линейной характеристики справедлива формула:
где U – текущее значение выходного напряжения датчика; U1=0,52 В; U2=4,4 В;
Реальные значения выходного напряжения датчика, при условии такой его калибровки, когда начальные и конечные значения его выходного напряжения совпадают с соответствующими значениями выходного напряжения идеально линейного датчика, определяются по формуле:
где Ur – реальное напряжение на выходе датчика; Br – текущее значение проекции индукции в точке расположения магниточувствительного элемента на его направление чувствительности; B1 – то же при В2 – то же при Для проекции вектора индукции с модулем В0 на направлении чувствительности магниточувствительного элемента справедливы выражения: Br=B0sin B1=B0sin B2=B0sin Формула для расчета относительной нелинейности датчика-прототипа:
Результаты расчета нелинейности датчика-прототипа представлены в виде графика на фиг.1, откуда видно, что максимум нелинейности характеристики датчика составляет около 7%. В случае радиальной намагниченности ротора магнита суммарная составляющая индукции в направлении чувствительности чувствительного элемента определяется по формуле:
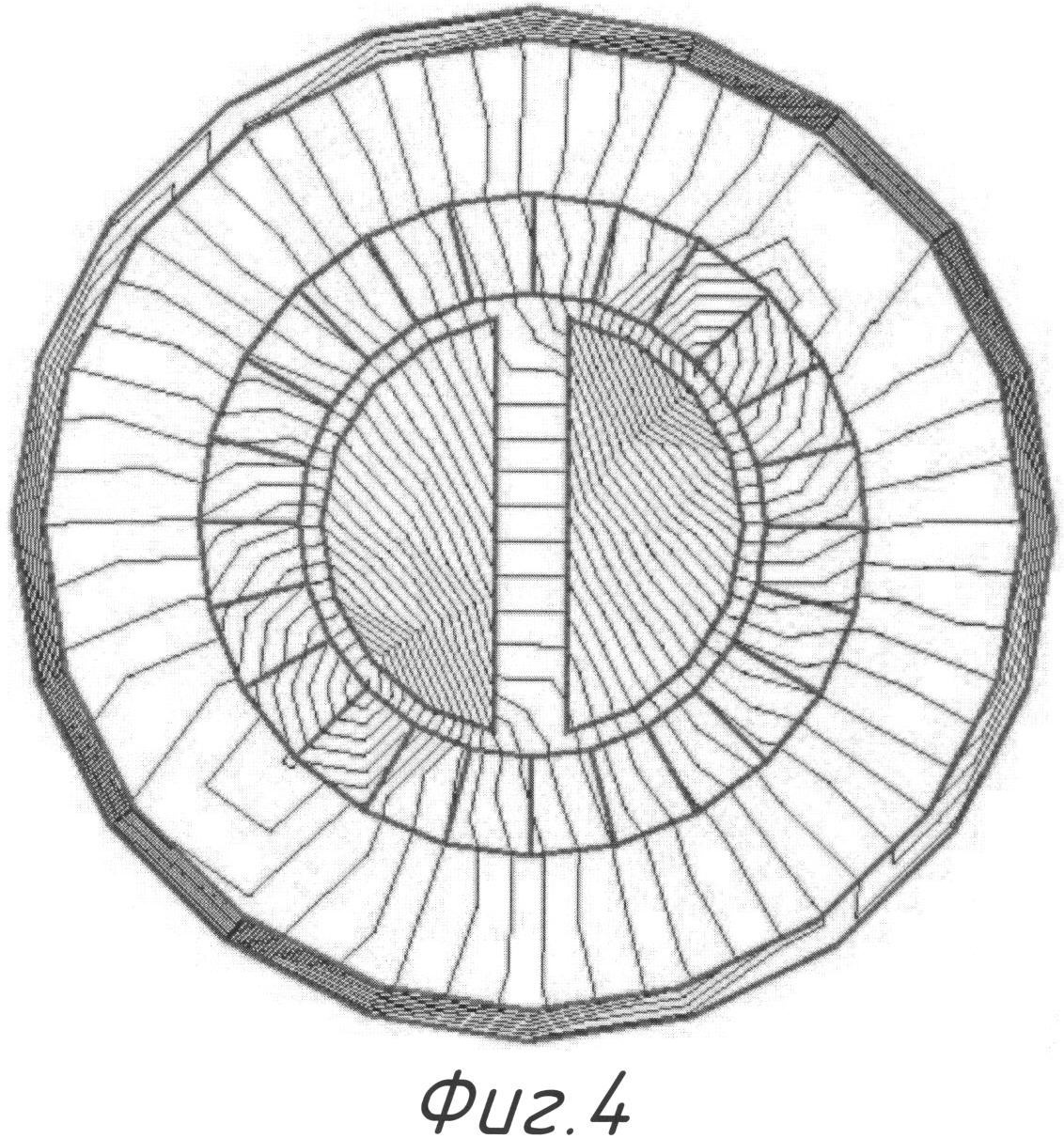
Отсюда видно, что закон изменения полезной составляющей индукции магнитного поля в точке расположения чувствительного элемента – синусоидальный, независимо от того, как намагничен ротор-магнит – диаметрально или радиально. То есть нелинейность датчика-прототипа имеет одинаковые значения при радиальном и диаметральном намагничивании ротора-магнита. Следует также отметить, что, вследствие зависимости магнитного потока внутри кольцевого ротора-магнита от магнитного сопротивления наружной по отношению к нему среды, на характеристику датчика-прототипа оказывают влияние внешние предметы из ферромагнитных материалов. Чувствительность прототипа к углу поворота вала невысокая ввиду значительной протяженности пути силовых линий магнитного поля по воздуху. Каждый из приведенных выше аналогов не удовлетворяет одновременно высоким требованиям к линейности характеристики и к ее устойчивости по отношению к производственным дефектам и естественному износу. Основная задача, которую решает предлагаемое изобретение, заключается в соединении полезных свойств известных устройств в едином датчике углового положения вала. К этим свойствам относятся: линейность и стабильность характеристики датчика независимо от неточности изготовления и износа его деталей, а также защищенность от влияния близкорасположенных предметов из ферромагнитных материалов и внешних магнитных полей. Кроме того, перед изобретением ставится задача повышения чувствительности датчика к углу поворота вала, что позволило бы снизить требование к величине индукции поля ротора-магнита. Техническим результатом решения поставленной задачи с помощью предлагаемого изобретения является снижение нелинейности выходной характеристики датчика, повышение ее устойчивости к производственным погрешностям изготовления деталей и их износу в процессе эксплуатации датчика, к влиянию внешних магнитных полей и близкорасположенных предметов из ферромагнитных материалов, а также повышение чувствительности датчика к углу поворота вала. Сущность предлагаемого изобретения состоит в том, что в известном устройстве датчика углового положения вала, содержащем соосный с валом кольцевой ротор-магнит, намагниченный поперек оси так, что у одного его полукольца векторы индукции направлены наружу, а у другого вовнутрь, а также расположенный неподвижно в центре его внутренней полости магниточувствительный элемент, направление чувствительности которого лежит в плоскости ротора-магнита, ротор-магнит намагничен радиально со спаданием поля от центра к краям каждого полукольца, а в его внутренней полости неподвижно и симметрично размещены два одинаковых сегмента-магнитопровода, образующие немагнитные зазоры с ротором-магнитом, а также эквидистантную немагнитную щель между собой, поперечную направлению чувствительности магниточувствительного элемента, причем вся конструкция помещена соосно в цилиндрический магнитный экран. К существенным признакам данного изобретения относятся: – наличие соосного с валом кольцевого ротора-магнита с такой поперечной оси радиальной намагниченностью, при которой векторы индукции одного его полукольца направлены наружу, а другого вовнутрь, причем полукольца намагничены со спаданием поля от их центров к краям; – наличие неподвижно расположенного в центре ротора-магнита магниточувствительного элемента, чувствительность которого ориентирована в направлении, лежащем в плоскости ротора-магнита; – наличие пары одинаковых сегментов-магнитопроводов, расположенных неподвижно и симметрично во внутренней полости ротора-магнита и образующих немагнитные зазоры с ротором-магнитом, а также эквидистантную немагнитную щель между собой; – наличие соосного с датчиком цилиндрического магнитного экрана, охватывающего всю конструкцию датчика. К существенным отличительным признакам предлагаемого изобретения относятся: – ротор-магнит намагничен радиально, причем его полукольца намагничены со спаданием намагничивающего поля от их центров к краям; – наличие пары сегментов-магнитопроводов, размещенных неподвижно, симметрично и соосно во внутренней полости ротора-магнита и образующих немагнитные зазоры с ротором-магнитом, а также эквидистантную немагнитную щель между собой; – наличие соосного с датчиком цилиндрического магнитного экрана, охватывающего всю конструкцию датчика. В одном из приведенных аналогов ротор-магнит тоже намагничен радиально, причем эта намагниченность так же, как и в предлагаемом датчике, служит для улучшения линейности характеристики. Однако вся совокупность признаков датчика-аналога, включая радиальную намагниченность ротора-магнита, не обеспечивает получение высокой стабильности характеристики. В предлагаемом же датчике обе проблемы решены положительно. В датчике-прототипе возможно применение радиальной намагниченности. Но линейность характеристики датчика-прототипа не зависит от характера намагниченности. Для него существенным признаком является только намагниченность в плоскости магнита, обеспечивающая наличие ненулевого поля в центре, где расположен магниточувствительный элемент. Магнитный экран в предлагаемом датчике выполняет несколько функций: во-первых, компенсацию нелинейности характеристики датчика, во-вторых, снижение влияния на характеристику датчика внешних полей и предметов из ферромагнитных материалов, в-третьих, повышение чувствительности датчика к углу поворота вала. Сегменты-магнитопроводы участвуют в линеаризации характеристики датчика и повышении его чувствительности к углу поворота вала. На фиг.1 показана зависимость относительной нелинейности датчика-прототипа от углового положения вала. Нелинейность обусловлена синусоидальной зависимостью величины проекции вектора магнитной индукции на направление чувствительности магниточувствительного элемента и превышает 6%. На фиг.2 приведено поперечное сечение предлагаемого датчика, содержащего магниточувствительный элемент 1, ротор-магнит 2, сегменты-магнитопроводы 3 и магнитный экран 4. Примечание: показанное на чертеже деление ротора-магнита на секторы использовалось при моделировании его магнитного поля для случая радиального намагничивания. На фиг.3, 4 показан ход силовых линий в элементах датчика при среднем положении ротора-магнита и при его повороте на угол 45 градусов. На фиг.5, 6 приводится распределение векторов магнитной индукции в элементах датчика при среднем положении ротора-магнита и при его повороте на угол 45 градусов. Если ротор-магнит повернуть на угол -45 градусов относительно среднего положения, то направление векторов индукции в щели между сегментами изменится на противоположное. На фиг.7 приводится расчетная характеристика нелинейности предлагаемого датчика. На фиг.8 схематически показана зависимость относительного изменения индукции от направления отклонения оси ротора-магнита на величину, равную 0,1 миллиметра, при фиксированном угле поворота ротора-магнита 45 градусов. В конструкции предлагаемого датчика, схематически представленной на фиг.2 в виде его поперечного оси сечения, между сегментами-магнитопроводами 3, ротором-магнитом 2 и магнитным экраном 4 имеются эквидистантные немагнитные зазоры. Вращающейся частью датчика является только ротор-магнит. Сегменты-магнитопроводы расположены симметрично во внутренней полости ротора-магнита. Причем щель между ними ориентирована в направлении среднего углового положения ротора-магнита, при котором середины его полуколец совпадают с линией продольной симметрии щели. Направление чувствительности магниточувствительного элемента поперечно щели. В данной конструкции силовые линии магнитного поля кольцевого ротора-магнита (фиг.3, 4) замыкаются через наружные и внутренние немагнитные зазоры и щель, а также через сегменты-магнитопроводы и магнитный экран, выполненные из ферромагнитного материала. Путь каждой силовой линии в общем случае может быть описан следующей последовательностью: наружная цилиндрическая поверхность ротора-магнита – немагнитный зазор между ротором-магнитом и магнитным экраном – магнитный экран – немагнитный зазор между магнитным экраном и ротором-магнитом – наружная поверхность ротора-магнита – внутренняя поверхность ротора-магнита – немагнитный зазор между ротором-магнитом и первым сегментом-магнитопроводом – первый сегмент-магнитопровод – немагнитная щель между первым и вторым сегментами-магнитопроводами – второй сегмент-магнитопровод – немагнитный зазор между вторым сегментом-магнитопроводом и внутренней цилиндрической поверхностью ротора-магнита – наружная цилиндрическая поверхность ротора-магнита. Часть силовых линий замыкается, минуя немагнитную щель между сегментами-магнитопроводами. При вращении ротора-магнита происходит перераспределение магнитных потоков между каналами, проходящими через немагнитную щель и минуя ее. Внутри щели векторы магнитной индукции имеют только одну поперечную щели составляющую, совпадающую с направлением чувствительности магниточувствительного элемента (фиг.5, 6). При такой конструкции характеристика датчика однозначна в диапазоне углов поворота ротора-магнита ±90 градусов относительно среднего положения. При повороте ротора-магнита в указанном диапазоне углов происходит изменение вектора индукции в щели между сегментами-магнитопроводами как по модулю, так и по направлению. Причем возможны только два взаимно противоположных направления этого вектора, которые, кроме того, поперечны щели. Линеаризация характеристики датчика достигается совместным применением сегментов-магнитопроводов, магнитного экрана и специального намагничивания ротора-магнита, заключающегося в том, что радиальное поле ротора-магнита должно спадать от центров полуколец к их краям. В отличие от датчика-прототипа упрощенный расчет характеристики предлагаемого датчика невозможен в силу сложного распределения магнитных полей. Поэтому для расчета характеристики датчика применялся метод конечных элементов. В процессе расчетов была произведена оптимизация размеров магнитного экрана при заданных диаметрах ротора-магнита и блока сегментов-магнитопроводов, а также распределения намагничивающего поля для ротора-магнита с точки зрения улучшения линейности характеристики датчика. Для оптимизации распределения поля ротора-магнита применялась весовая функция cos( Ввиду симметрии конструкции датчика и значительной разницы в величинах зазоров и допусков на них при производстве датчиков или их отклонений в результате износа можно считать, что небольшие смещения оси ротора-магнита приводят к примерно одинаковым по абсолютной величине и противоположным по знаку изменениям двух эквивалентных магнитных сопротивлений, составляющих последовательную цепь с немагнитной щелью между сегментами-магнитопроводами и ротором-магнитом. При этом магнитный поток через щель практически не изменяется, а значит, датчик становится малочувствительным к смещениям оси ротора-магнита. Результаты расчетов, отраженные на фиг.7, 8, показывают, что нелинейность предлагаемого датчика более чем на порядок меньше нелинейности прототипа, а зависимость характеристики от смещения оси ротора меньше, чем у датчика с наружным размещением магниточувствительного элемента по отношению к ротору-магниту. С точки зрения влияния смещения оси ротора-магнита на выходную характеристику предлагаемый датчик сравним с прототипом, имеющим аналогичную с предлагаемым датчиком эквивалентную схему. Однако при прочих равных условиях предлагаемый датчик обладает из-за наличия внешнего экрана и внутренних сегментов-магнитопроводов значительно большей чувствительностью к углу поворота вала. Наличие магнитного экрана уменьшает наружное по отношению к нему магнитное поле, создаваемое ротором-магнитом. Это приводит к уменьшению влияния на характеристику датчика внешних предметов из ферромагнитных материалов. Магнитный экран ослабляет также влияние сторонних магнитных полей на эту характеристику. Таким образом, технический результат, заключающийся в снижении нелинейности характеристики датчика и повышении ее помехоустойчивости в условиях наличия неточности изготовления деталей и их износа в процессе эксплуатации, а также в повышении чувствительности датчика к углу поворота вала, данным изобретением достигается. Источники информации
2. Бараночников М.Л. Микромагнитоэлектроника. – М.: ДМК Пресс, 2001. – С.272-276.
Формула изобретения
Бесконтактный датчик углового положения вала, содержащий соосный с валом кольцевой ротор-магнит, намагниченный поперек оси так, что у одного его полукольца векторы индукции направлены наружу, а у другого – вовнутрь, а также расположенный неподвижно в центре его внутренней полости магниточувствительный элемент, направление чувствительности которого лежит в плоскости ротора-магнита, отличающийся тем, что ротор-магнит намагничен радиально со спаданием поля от центра к краям каждого полукольца, а в его внутренней полости неподвижно и симметрично размещены два одинаковых сегмента-магнитопровода, образующие немагнитные зазоры с ротором-магнитом, а также эквидистантную немагнитную щель между собой, поперечную направлению чувствительности магниточувствительного элемента, причем вся конструкция помещена соосно в цилиндрический магнитный экран.
РИСУНКИ
|
||||||||||||||||||||||||||
 2 с.52-59.
2 с.52-59.
 1=-45°;
1=-45°;