Патент на изобретение №2376159
|
||||||||||||||||||||||||||
(54) ТЕЛЕМЕТРИЧЕСКАЯ СИСТЕМА КОНТРОЛЯ БОДРСТВОВАНИЯ МАШИНИСТА ЛОКОМОТИВА
(57) Реферат:
Изобретение относится к диагностике психофизиологического состояния человека в процессе профессиональной деятельности и может быть использовано в системах автоматического контроля состояния машинистов железнодорожных транспортных средств. Устройство содержит комплект телеметрических датчиков, блок связи, блок цифровой обработки сигналов и управления, блок обработки внешних сигналов и связи с компьютерной системой локомотива. Блок цифровой обработки сигналов и управления включает два идентичных блока цифровой обработки информации, выполненные с возможностью взаимного обмена информацией, кнопку подтверждения бодрствования, блок сравнения. Блок обработки внешних сигналов и связи с компьютерной системой локомотива содержит блок первичной обработки информации. Технический результат заключается в повышении надежности системы контроля бодрствования машиниста локомотива. 7 з.п. ф-лы, 6 ил.
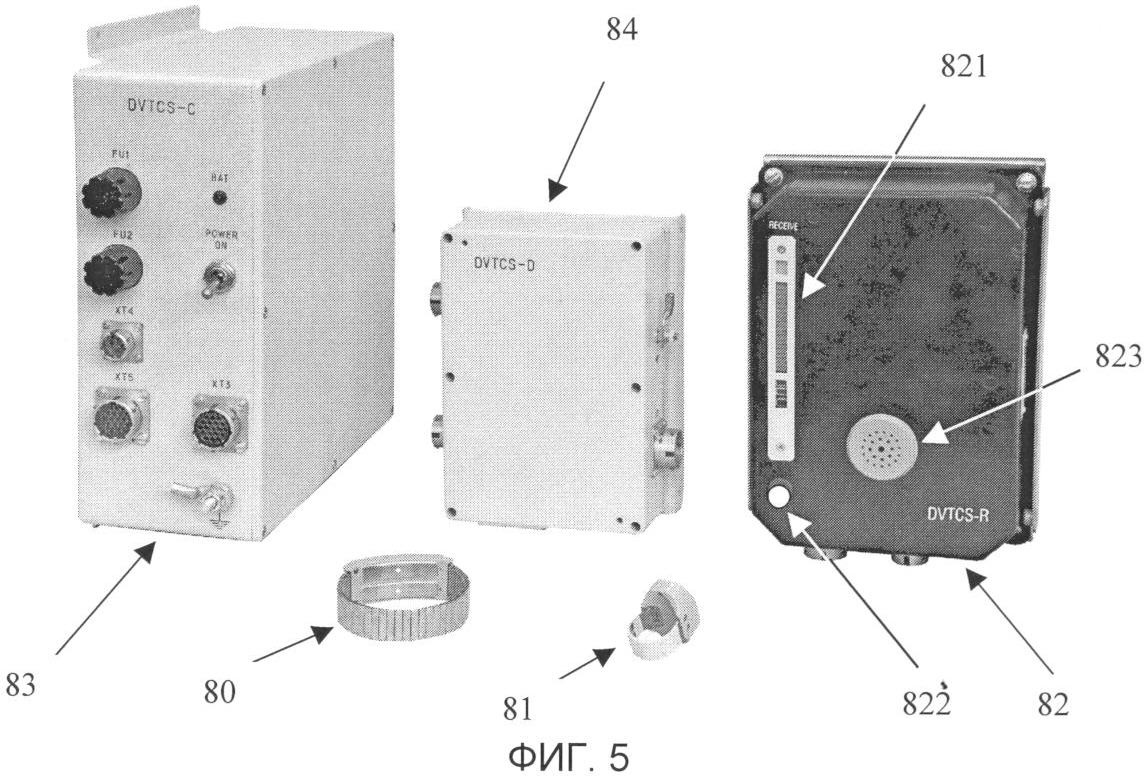
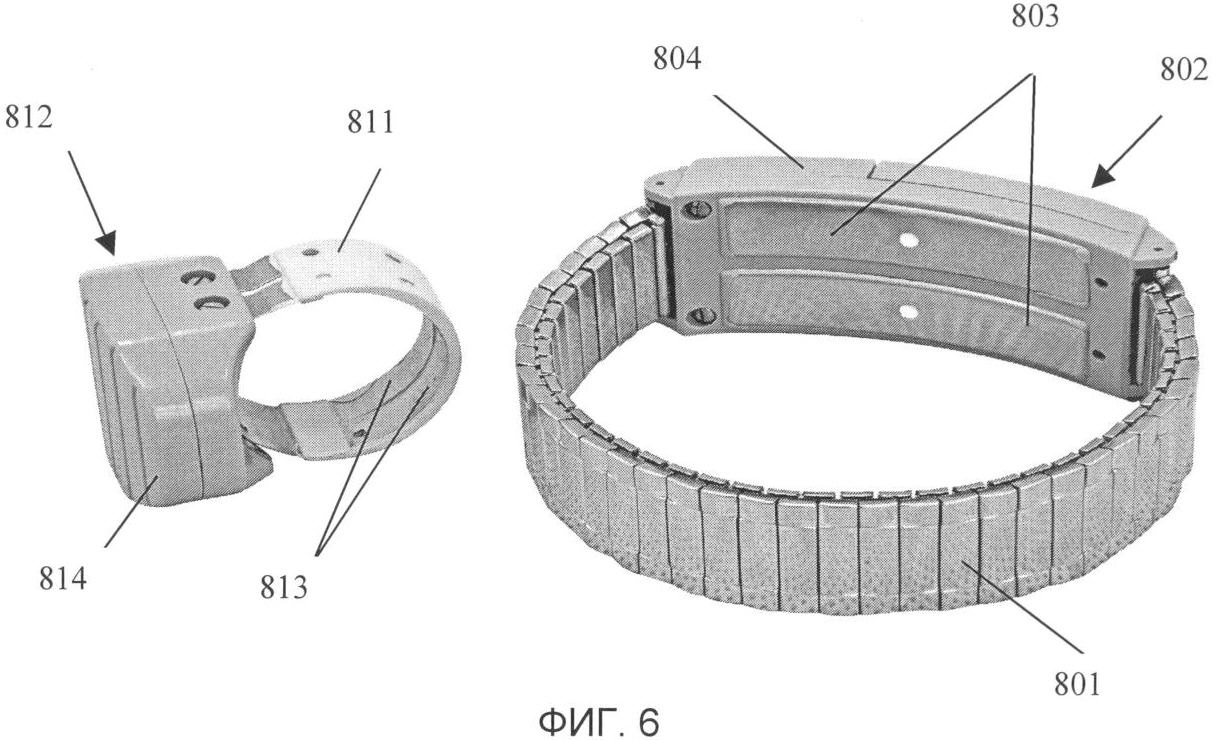
Изобретение относится к диагностике психофизиологического состояния человека в процессе профессиональной деятельности и может быть использовано в системах автоматического контроля состояния машинистов железнодорожных транспортных средств. Одним из наиболее информативных критериев перехода в состояние потери работоспособности водителя – засыпания – является изменение кожно-гальванической реакции (RU 2107460, НЕЙРОКОМ, 27.03.1998; US 6167299, Galchenkov et al., NEUROCOM, 26.12.2000; EP 0925758B1, Galchenkov et al., NEUROCOM, 14.01.2004). Устройство содержит электроды со средствами их крепления, подключенные к входному устройству, средства для подавления импульсных помех, средства для выделения сигнала в полосе фазической составляющей электродермальной активности, средства для детектирования импульсов фазической составляющей, блок регистрации. Технические аспекты реализации устройства на транспорте – обеспечение устойчивой телеметрии и поддержание бодрствования без создания дополнительных неудобств водителю – приведены в описаниях телеметрических систем контроля бодрствования водителя транспортного средства (RU 2200095, 09.08.2001; RU 2251156, 27.04.2005 – НЕЙРОКОМ). Так, система по патенту RU 2251156 включает телеметрический датчик, блоки приема, обработки сигнала и управления, блок индикации, включающий блок управления индикацией, к выходам которого подключены блок звуковой сигнализации и индикаторы уровня бодрствования. Наиболее близким аналогом патентуемой системы является телеметрическая система контроля работоспособности оператора по патенту RU 2282543, НЕЙРОКОМ, 27.08.2006. Система содержит связанные по радиоканалу приемник и два телеметрических датчика, а также блок цифровой обработки сигналов и управления, связанный с блоком индикации. Каждый датчик имеет электроды для обеспечения электрического контакта с кожей водителя, подключенные к аналого-цифровому преобразователю, выход которого подключен к передатчику с антенной. Один из датчиков выполнен с возможностью установки на запястье, а другой – на пальце руки водителя. Передатчики обоих телеметрических датчиков и приемник выполнены с возможностью передачи и приема индивидуальных сигналов от каждого из телеметрических датчиков. Блок цифровой обработки сигналов и управления выполнен с возможностью суммирования сигналов от обоих датчиков в режиме реального времени и вычисления на основе этой информации величины уровня бодрствования (УБ) машиниста. Однако анализ показывает, что надежность системы недостаточна при реализации схемы с единственным блоком цифровой обработки сигналов, поскольку возможны ситуации, когда возникает необнаруживаемый опасный отказ системы в результате неправильной работы блока цифровой обработки сигналов. Иными словами, при исправной системе измерения и телеметрического приема информации от датчиков сбой в блоке цифровой обработки сигналов и вычисления показателей работоспособности может привести к отсутствию сигнала тревоги даже в случае засыпания машиниста. Особенно это драматично для железнодорожного транспорта, поскольку размер ущерба в случае железнодорожных катастроф очень велик. Патентуемая телеметрическая система контроля бодрствования машиниста локомотива содержит: комплект 1 телеметрических датчиков для установки на запястье и на пальце машиниста для регистрации изменения электрического сопротивления кожи, блок 2 связи для приема радиосигналов от телеметрических датчиков 10, 12 и обмена служебной информацией с этими датчиками, включает связанные между собой приемопередатчик 22, блок 23 управления сигналами, блок 24 световой и звуковой индикации, блок 3 цифровой обработки сигналов и управления и блок 4 обработки внешних сигналов и связи с компьютерной системой локомотива, связанные через интерфейсы 25, 26, 31, 41 с упомянутым блоком 2 связи, блок 3 цифровой обработки сигналов и управления включает два идентичных блока 32 и 33 цифровой обработки информации, выполненные с возможностью взаимного обмена информацией (321), кнопку 34 подтверждения бодрствования, блок 35 сравнения, выход которого соединен с блоком 36 формирования выходного сигнала, являющимся выходом системы, а входы блока 35 сравнения соединены с выходами блоков 32 и 33 цифровой обработки информации, входы и один из выходов (331) которых (32, 33) соединены с интерфейсом 31 и кнопкой 34 подтверждения бодрствования, блок 4 обработки внешних сигналов и связи с компьютерной системой локомотива содержит блок 42 первичной обработки информации, имеющий группу входов 43 для подключения к соответствующим электрическим цепям локомотива, и разъем 44 для подключения к внутреннему интерфейсу локомотива. Система может характеризоваться тем, что телеметрический датчик содержит два электрода 101, 102 для обеспечения электрического контакта с кожным покровом руки машиниста, подключенные к входу аналого-цифрового преобразователя 103, выход которого соединен с входом приемопередатчика 104 и антенной. Система может характеризоваться и тем, что один телеметрический датчик выполнен в форме браслета по типу наручных часов, а другой – в форме перстня, на поверхности которых, обращенных к телу водителя, размещены электроды. Система может характеризоваться также тем, что телеметрические датчики установлены в перчатке и скреплены с ней. Система может характеризоваться и тем, что блок цифровой обработки информации выполнен с возможностью фиксации импульсов электрического тока в полосе частот фазической составляющей электродермальной активности, анализа формы каждого импульса в последовательности импульсов в упомянутой полосе частот, выделения импульсов КГР на основе соответствия их формы установленным критериям. Система может характеризоваться также тем, что контроль бодрствования машиниста осуществляется по параметрам следования импульсов кожно-гальванической реакции, при этом блоки 32 и 33 цифровой обработки информации выполнены с возможностью измерения величины интервалов времени между моментами появления импульсов кожно-гальванической реакции и вычисления текущего значения уровня бодрствования по формуле УБ=1,66·(60-Dt) (%), при Dt<60; УБ=0 (%), при Dt>60; где УБ – текущее значение уровня бодрствования; Dt – интервал времени между моментами появления импульсов кожно-гальванической реакции, сек. Система может характеризоваться, кроме того, тем, что блок 36 формирования выходного сигнала представляет собой преобразователь цифрового сигнала в напряжение, достаточное для управления системой торможения локомотива. Система может характеризоваться также и тем, что блоки 32 и 33 цифровой обработки информации связаны между собой двусторонней шиной 321 обмена байтами промежуточной информации, полученными путем комбинации битов служебной информации и двоичного значения УБ уровня бодрствования, с последующим сравнением с собственными байтами промежуточной информации, и формирования признака ошибки в случае несовпадения байтов. Технический результат настоящего изобретения состоит в повышении надежности системы за счет организации параллельных независимых вычислений уровня бодрствования (УБ) и введения дополнительной схемы сравнения результатов этих вычислений. Организация обмена промежуточной и служебной информацией между независимыми блоками цифровой обработки сигналов и вычисления показателей работоспособности дает возможность определить корректность функционирования устройства. Существо изобретения поясняется чертежами, где: на фиг.1 показана блок-схема патентуемой системы контроля бодрствования машиниста; на фиг.2 – блок-схема телеметрического датчика; на фиг.3 представлен алгоритм функционирования системы в целом; на фиг.4 – алгоритм вычисления уровня бодрствования; на фиг.5 – компоновочное решение блоков системы; на фиг.6 – выполнение телеметрических датчиков. Система содержит (фиг.1, 2) комплект 1 телеметрических датчиков для машиниста локомотива, блок 2 связи с телеметрическими датчиками, блок 3 цифровой обработки сигналов и управления, блок 4 обработки внешних сигналов и связи с компьютерной системой локомотива. Комплект 1 включает по меньшей мере два телеметрических датчика 10, 12. Датчики предназначены для получения информации о психофизиологическом состоянии машиниста транспортного средства и передачи этой информации по радиоканалу. Психофизиологическое состояние регистрируется по изменению кожного сопротивления – кожно-гальванической реакции (КГР). Телеметрические датчики 10, 12 располагаются на запястье и на пальце машиниста. Датчики могут быть выполнены в виде браслета (или наручных часов), перстня или размещаться в перчатке. Единичный телеметрический датчик 10 (см. фиг.2) имеет электроды 101, 102 для обеспечения электрического контакта с кожей руки машиниста, подключенные к входу аналого-цифрового преобразователя (АЦП) 103, выход которого подключен к входу приемопередатчика 104 с антенной 105. Питание датчика осуществляется от встроенного сменного автономного элемента (не показан). Телеметрические датчики характеризуются идентичной функциональной схемой и различаются только формой корпуса и электродов (см. также фиг.6). Блок 2 связи предназначен для приема высокочастотных радиосигналов от телеметрических датчиков 10, 12, обмена служебной информацией с этими датчиками и блоком 3 цифровой обработки и управления. Блок 2 содержит приемопередатчик 22 с антенной. Приемопередатчик 22, так же как и комплект 1 датчиков 10, 12, выполняется таким образом, чтобы обеспечить прием телеметрической информации по радиоканалу с последующим разделением сигналов. Выход блока 22 связан с возможностью двустороннего обмена с блоком 23 управления сигналами. Один выход блока 23 подключен к блоку 24 световой и звуковой индикации. Другой вход-выход блока 23 через интерфейс 25 подключен к блоку 3 цифровой обработки сигналов и управления. Третий вход-выход блока 23 через интерфейс 26 подключен к блоку 4 обработки внешних сигналов и связи с компьютерной системой локомотива. Блок 24 световой и звуковой индикации – дисплей – предназначен для отображения уровня бодрствования (УБ) машиниста, для индикации наличия радиосигналов от обоих датчиков 10, 12, а также для формирования сигнала тревоги. ). Этот протокол при малых энергоресурсах связываемых устройств предусматривает дальность действия около 10 метров и пропускную способность канала до 250 кбит/с. Передача на этой скорости ведется в диапазоне частот 2,4 ГГц. Блок 3 цифровой обработки сигналов и управления включает интерфейс 31, связывающий его с блоком 2. Интерфейс 31 связан далее с блоками 32 и 33 цифровой обработки информации, которые обеспечивают вычисление УБ. Блоки 32 и 33 идентичны и могут быть выполнены, например, с использованием микроконтроллеров. К входам блоков 32, 33 подключена кнопка 34 подтверждения бодрствования, по назначению и функции, выполняющая роль известной на железнодорожном транспорте т.н. рукоятки бдительности. Блоки 32 и 33 имеют общую цифровую шину 321 для взаимного обмена информацией. Выход одного из блоков 32 или 33 (на фиг.1 показана шина 331) связан через интерфейс 31 с блоком 2 для передачи информации на индикатор 24. Другие выходы блоков 32 и 33 связаны с блоком 35 сравнения для анализа идентичности результатов вычислений УБ. Выход блока 35 сравнения подключен к входу блока 36 формирования выходного сигнала телеметрической системы контроля бодрствования машиниста. Блок 36 представляет собой преобразователь цифрового сигнала в напряжение, необходимое для управления системой торможения локомотива. Выход блока 36 подключен через выходные клеммы 37 к соответствующим цепям управления локомотива. Блок 4 обработки внешних сигналов и связи с компьютерной системой локомотива содержит интерфейс 41, связывающий его с блоком 2, блок 42 первичной обработки информации, имеющий группу входов 43 для подключения к соответствующим электрическим цепям локомотива, разъем 44 для подключения к внутреннему интерфейсу локомотива. Интерфейсы 25 и 31 могут быть организованы, например, по стандарту ИРПС 20 mA “токовая петля”, а интерфейсы 26 и 41 – по стандарту CAN BUS. Система функционирует следующим образом. Телеметрический датчик 10 крепится на палец, а датчик 12 – на запястье машиниста. При контакте электродов 101, 102 датчика 10 и аналогичных электродов датчика 12 с кожей человека обеспечивается возможность измерения электрического сопротивления кожи, характеризующего текущее психофизиологическое состояние машиниста. В датчике 10 посредством АЦП 103 текущее значение электрического сопротивления преобразуется в цифровой вид. Этот сигнал с выхода АЦП 103 поступает на приемопередатчик 104 и антенну 105. Полностью аналогичные процессы осуществляются в датчике 12. Далее, сигналы датчиков 10 и 12 передаются по радиоканалу в блок 2 связи, где с выхода приемопередатчика 22 поступают на вход блока 23 управления сигналами. По запросу блока 3 цифровой обработки сигналами и управления информационный код подается через интерфейс 25 в блок 2. В ответ из блока 2 на блоки 32 и 33 передаются сигналы, соответствующие измеренному текущему значению сопротивления кожи. Блоки 32 и 33 цифровой обработки информации анализируют полученные с блока 2 данные. На основе этого анализа, с учетом известных критериев оценки состояния бодрствования человека по КГР, в блоках 32 и 33 вычисляется УБ машиниста. В процессе вычисления блоки 32 и 33 обмениваются промежуточной, а также служебной информацией для контроля корректности функционирования системы. К такой информации относится: наличие сигнала в радиоканалах, уровень заряда батарей питания датчиков, наличие сигналов на входах 43 блока 4. В соответствии с вычисленным в блоках 32, 33 значением УБ блок 3 через интерфейс 31 в блок 2 выдает код индикации, соответствующий текущей величине УБ. Команда на индикацию УБ передается от одного из блоков 32, 33 на интерфейс 31 по цифровой шине 331. Блок 24, получив от блока 3 код индикации, отображает значение УБ и при его критическом снижении включает визуальный и/или звуковой сигналы тревоги. Появление визуального и/или звукового сигналов тревоги потребует от машиниста нажатия кнопки 34 подтверждения бодрствования. Сигнал от нажатия кнопки 34 передается через блоки 32 и 33 на вход блока 35. Если машинист нажал кнопку 34 или блок 4 зарегистрировал и передал через интерфейс 41 в блок 2 сигнал по любому из входов 43, работа всей системы продолжается в прежнем режиме. В том случае, если кнопка 34 не была нажата или из блока 4 в блок 2 не поступило никакого сигнала, подтверждающего бодрствование, блок 35 сравнения выдает управляющие сигналы на блок 36 формирования выходного сигнала. Поскольку выходные клеммы 37 блока 36 подключены к системе аварийного торможения локомотива, происходит срабатывание этой системы. Если бортовая сеть локомотива использует стандарт CAN BUS, то патентуемая система может быть подключена к ее внутреннему интерфейсу через разъем 44 блока 4 обработки внешних сигналов и связи с компьютерной системой локомотива. Соответственно, в бортовую сеть локомотива в этом случае будет передаваться информация о текущем значении УБ машиниста, подключении сигналов тревоги, факте нажатия машинистом кнопки 34 подтверждения бодрствования, а также информация о наличии сигналов на входах 43 блока 4. Алгоритм функционирования системы показан на фиг.3, 4. При включении питания (шаг п.50) проводится проверка наличия радиосигналов от датчиков 10, 12 (п.51). В том случае, если сигнал от обоих датчиков 10, 12 отсутствует, система возвращается в цикл слежения за появлением сигнала от датчиков. При наличии хотя бы одного из сигналов в блоке 24 включается индикация приема сигнала от соответствующего датчика (п.52). Далее, с блока 2 на вход каждого из блоков 32, 33 передается информация о текущем значении кожного сопротивления (п.53), служебная информация (п.54). Блоками 32, 33 производится вычисление УБ (п.55) и преобразование его в двоичный код. При этом за стопроцентный УБ принимается значение «32», соответствующее полной работоспособности (профессиональной активности) машиниста, а значение «0» – УБ, соответствующему состоянию засыпания. Алгоритм обработки сигналов телеметрии и критерии определения УБ известны из упомянутых выше патентов (RU 2107460, US 6167299 и ЕР 0925758), в настоящем описании приводятся кратко и состоят в следующем (см. фиг.4). Датчиками 10 и 12 регистрируются изменения электрического сопротивления кожи машиниста, возникающие в полосе частот фазической составляющей электродермальной активности. Анализируется форма каждого импульса в последовательности импульсов в полосе частот фазической составляющей. Для этого в блоках 32, 33 вычисляется производная по времени от логарифма численного значения электрического тока (см. п.550, 551 на фиг.4), вычисляется вторая производная по времени от логарифма численного значения электрического тока (п.552). Определяется величина тренда, обусловленного изменениями сигнала в полосе частот тонической составляющей электродермальной активности, и корректируется величина первой производной путем вычитания из нее величины тренда (п.553). Определяются начало импульса по моменту превышения второй производной пороговой величины (п.554) и момент окончания импульса (п.555). Для определения формы импульса регистрируют значения максимальной (fMAX) и минимальной (fMIN) величин первой производной за вычетом величины тренда, их отношение (r), интервал времени (tx) между минимумом и максимумом первой производной. При этом моменты достижения fMAX и fMIN определяются по моменту смены знака второй производной. Критериями принадлежности анализируемого импульса к сигналу фазической составляющей электродермальной активности (КГР) (п.556) могут являться следующие неравенства: 0,5 Далее определяют соответствие формы импульса установленным критериям (п.557). При наличии такого соответствия относят анализируемый импульс к сигналам КГР (п.558), а при отсутствии соответствия – к артефактам (п.559). Уровень бодрствования УБ, например, в процентах вычисляется каждым из блоков 32, 33 по величине интервалов Dt времени (в секундах) между моментами появления импульсов КГР (п.560) по формуле УБ=1,66·(60-Dt)(%), при Dt<60; УБ=0 (%), при Dt>60. (*) Все численные значения критериев определения формы импульсов и отнесения их к сигналам КГР и определения УБ получены на большом статистическом материале (более 10000 измерений). С использованием полученной информации формируются два байта промежуточной информации (п.56). Байты вычисляются путем комбинации битов служебной информации и двоичного значения УБ, рассчитанного блоками 32, 33. Затем производится обмен байтами промежуточной информации по шине 321 между блоками 32 и 33 (п.57). Полученные байты сравниваются с собственными байтами промежуточной информации. В случае несовпадения байтов блок 32 и/или 33 формирует у себя признак ошибки (п.58). Если ошибки имеются (п.59), то производится индикация их факта (п.68). Причины формирования признака ошибки 1. Отсутствие радиосигналов на входе блока 2 связи с телеметрическими датчиками. 2. При наличии радиосигналов с датчиков 10, 12 – отсутствие электрического контакта электродов 101, 102 с кожей руки машиниста, например, при снятии датчиков с руки. 3. Наличие двух и более работающих комплектов датчиков в зоне приема радиосигналов блоком 2 связи. Одновременно из блоков 32, 33 упомянутые проверочные байты передаются на блок 35 сравнения (п.60). В случае несовпадения (п.61) проверочных байтов блок 35 сравнения выдает сигнал ошибки на блок 36 формирования управляющего воздействия на клеммах 37 (п.67). Если ошибки не выявлены, производится индикация текущего значения УБ (п.62). Далее проводится анализ значения УБ (п.63). Критическим значением УБ для подачи сигнала тревоги является значение 10% по формуле (*), т.е. в описываемой реализации – величина «3». Если значение УБ выше критического, система возвращается на шаг (п.51). Если значение УБ ниже критического, выдается сигнал тревоги (п.64). Затем проверяется ответная реакция машиниста: была ли нажата в течение заданного интервала времени кнопка 34 (п.65). Если кнопка 34 нажата, система возвращается на шаг (п.63). Если кнопка 34 не нажата, проверяется наличие сигналов от органов управления локомотивом (п.66) с группы входов 43. Если хотя бы один из этих сигналов присутствует, то система возвращается на шаг – п.63. При отсутствии сигналов от кнопки 34 (п.65) или группы входов 43 (п.66) подается управляющее воздействие (п.67) на выходные клеммы 37, подключенные к системе торможения локомотива. После чего происходит (п.69) перезапуск системы и возврат на шаг (п.51). На фиг.5, 6 показана фотография одной из возможных реализаций системы. Телеметрический датчик 80 предназначен для запястья машиниста и содержит браслет 801 по типу браслета для наручных часов, к которому присоединен собственно чувствительный узел 802 телеметрического датчика. На внутренней поверхности узла 802 размещены два электрода 803 для контакта с кожным покровом машиниста при надевании на руку. Элементы радиосхемы (АЦП, приемопередатчик и антенна) размещены в корпусе 804. Аналогичное воплощение имеет перстень 81, состоящий из шинки – пружинистого кольца 811, чувствительного узла 812, электродов 813 на внутренней поверхности кольца и корпуса 814 для размещения элементов радиосхемы. Источник питания (не показан) размещается в корпусах датчиков. Основные блоки системы скомпонованы в виде отдельных узлов: поз.82 – блок связи, поз.83 – блок цифровой обработки сигналов и управления, поз.84 – блок обработки внешних сигналов и связи с компьютерной системой локомотива. Поз. 821 показан индикатор УБ в форме линейки светодиодов, поз.822 – кнопка подтверждения бодрствования, поз.823 – звуковой сигнализатор тревоги.
Формула изобретения
1. Телеметрическая система контроля бодрствования машиниста локомотива, содержащая комплект телеметрических датчиков для установки на запястье и на пальце машиниста для регистрации изменения электрического сопротивления кожи, блок связи для приема радиосигналов от телеметрических датчиков и обмена служебной информацией с этими датчиками, включающий связанные между собой приемопередатчик, блок управления сигналами, блок световой и звуковой индикации, блок цифровой обработки сигналов и управления и блок обработки внешних сигналов и связи с компьютерной системой локомотива, связанные через интерфейсы с упомянутым блоком связи, блок цифровой обработки сигналов и управления включает два идентичных блока цифровой обработки информации, выполненные с возможностью взаимного обмена информацией, кнопку подтверждения бодрствования, блок сравнения, выход которого соединен с блоком формирования выходного сигнала, являющимся выходом системы, а входы блока сравнения соединены с выходами блоков цифровой обработки информации, входы и один из выходов которых связаны с интерфейсом и кнопкой подтверждения бодрствования, блок обработки внешних сигналов и связи с компьютерной системой локомотива содержит блок первичной обработки информации, имеющий группу входов для подключения к соответствующим электрическим цепям локомотива и разъем для подключения к внутреннему интерфейсу локомотива. 2. Система по п.1, в которой телеметрический датчик содержит два электрода для обеспечения электрического контакта с кожным покровом руки машиниста, подключенных к входу аналого-цифрового преобразователя, выход которого связан с входом приемопередатчика и антенной. 3. Система по п.1, в которой один телеметрический датчик выполнен в форме браслета по типу наручных часов, а другой – в форме перстня, на поверхности которых, обращенных к телу водителя, размещены электроды. 4. Система по п.1, в которой телеметрические датчики установлены в перчатке и скреплены с ней. 5. Система по п.1, в которой блок цифровой обработки информации выполнен с возможностью фиксации импульсов электрического тока в полосе частот фазической составляющей электродермальной активности, анализа формы каждого импульса в последовательности импульсов в упомянутой полосе частот, выделения импульсов кожно-гальванический реакции на основе соответствия их формы установленным критериям. 6. Система по п.1, в которой контроль бодрствования машиниста осуществляется по параметрам следования импульсов кожно-гальванической реакции, при этом блоки цифровой обработки информации выполнены с возможностью измерения величины интервалов времени между моментами появления импульсов кожно-гальванической реакции и вычисления текущего значения уровня бодрствования по формуле 7. Система по п.1, в которой блок формирования выходного сигнала представляет собой преобразователь цифрового сигнала в напряжение, достаточное для управления системой торможения локомотива. 8. Система по п.1, в которой блоки цифровой обработки информации связаны между собой двусторонней шиной обмена байтами промежуточной информации, полученными путем комбинации битов служебной информации и двоичного значения УБ, с последующим сравнением с собственными байтами промежуточной информации и формированием признака ошибки в случае несовпадения байтов.
РИСУНКИ
|
||||||||||||||||||||||||||