Патент на изобретение №2375290
|
||||||||||||||||||||||||||
(54) ПНЕВМОКОНВЕЙЕР СО СТРУЙНЫМ УПРАВЛЕНИЕМ
(57) Реферат:
Изобретение относится к производственным системам транспортирования на воздушной подушке изделий при реализации различных технологических процессов. Пневмоконвейер содержит пневматическую камеру и расположенную над ней несущую поверхность, в которой выполнены перпендикулярно продольной ее осевой линии щелевые отверстия, сообщенные с пневматической камерой. Несущая поверхность пневмоконвейера снабжена центральным рядом прямоугольных карманов. В дне каждого из карманов выполнено щелевое отверстие, параллельно которому в противоположных стенках прямоугольного кармана выполнены каналы управления. Изобретение обеспечивает упрощение конструкции устройства, устранение подвижных механических элементов и повышение надежности ее работы. 5 ил.
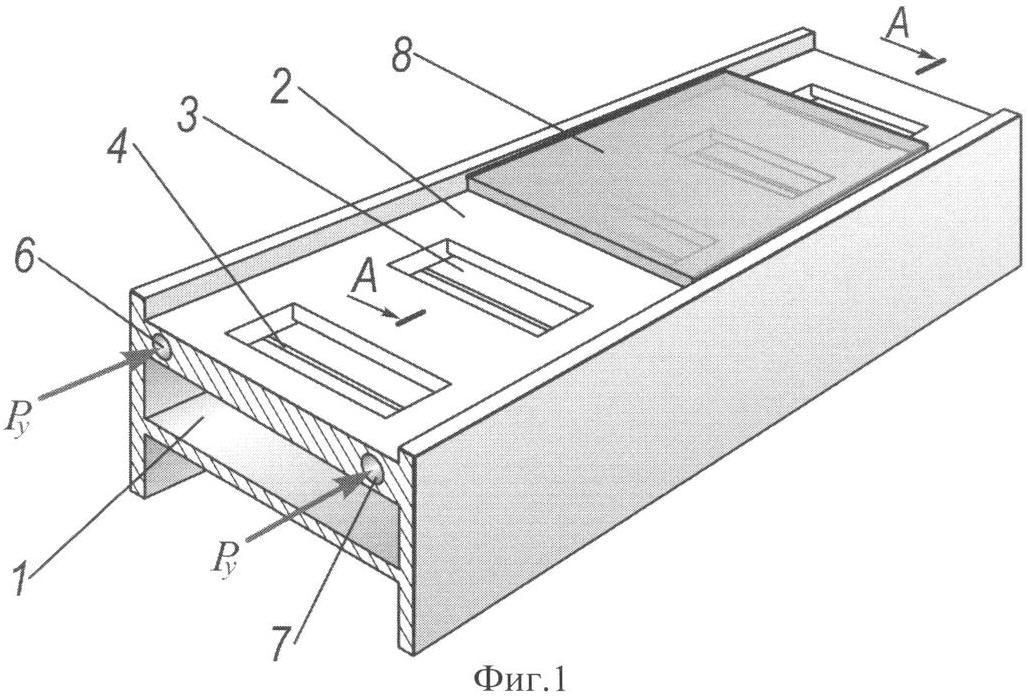
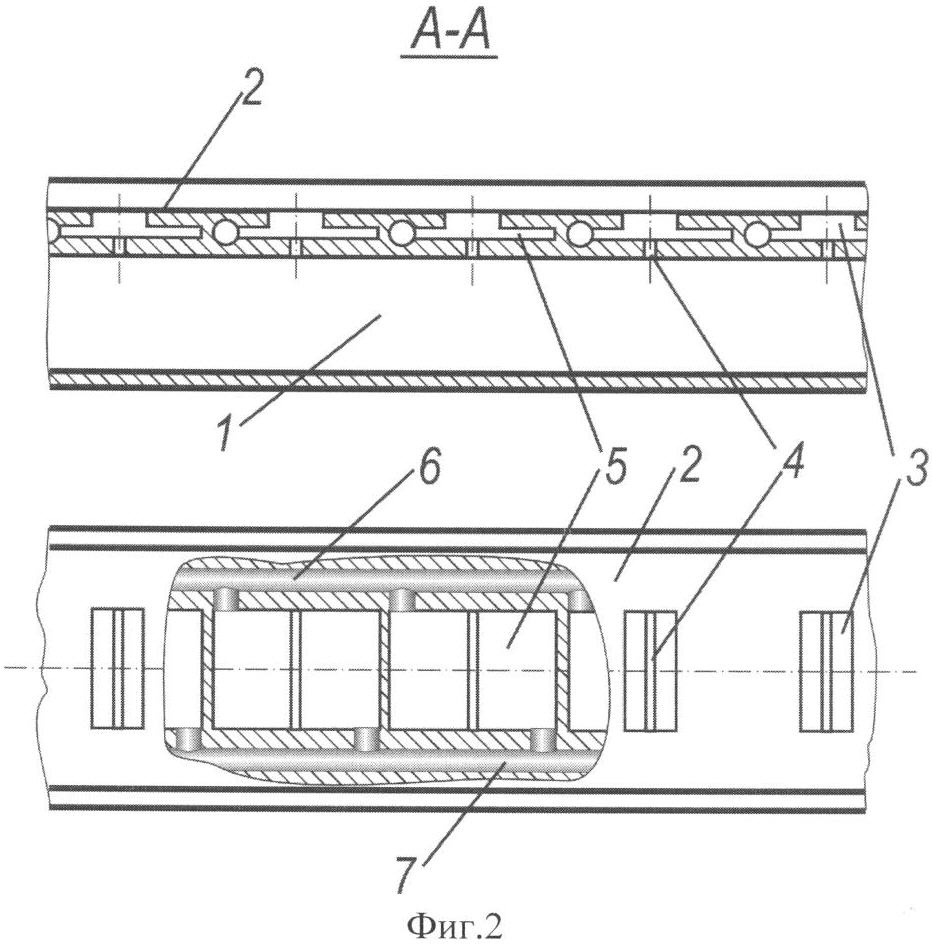
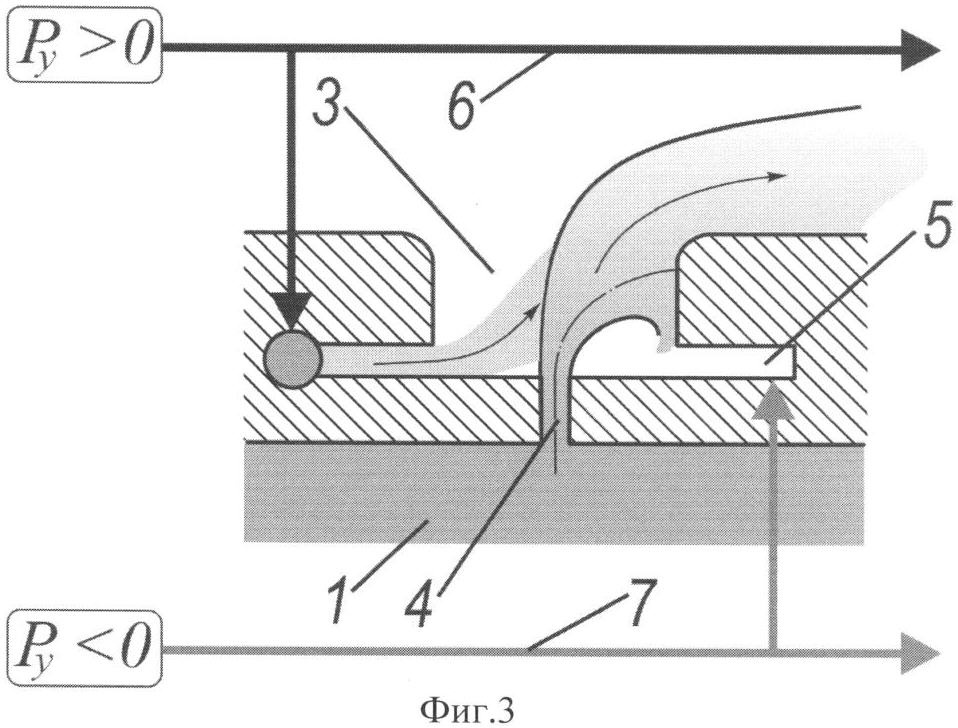
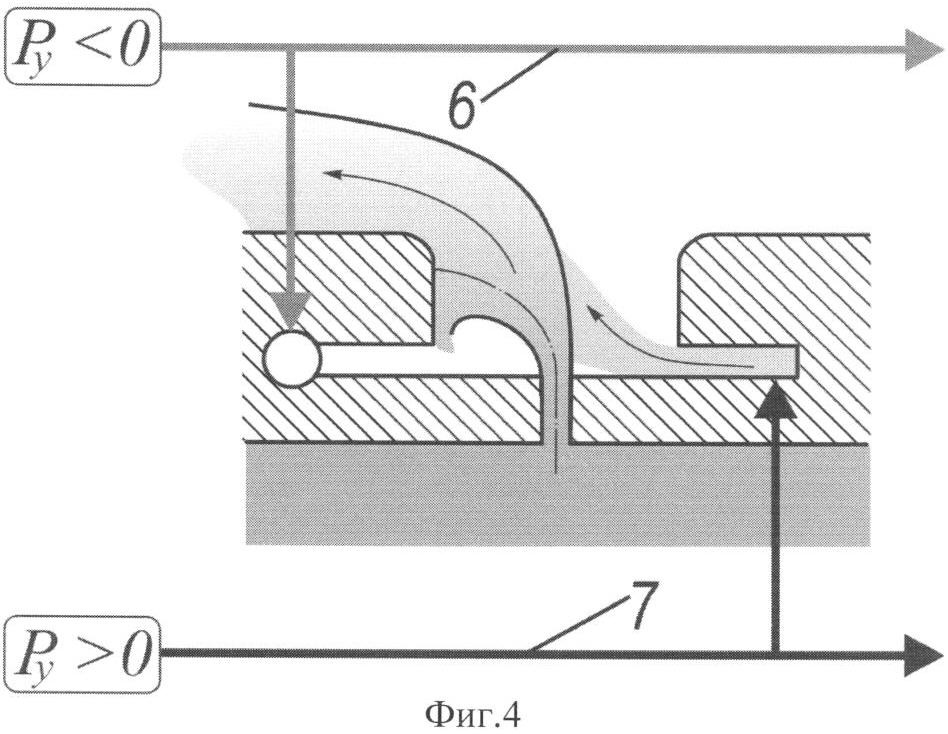
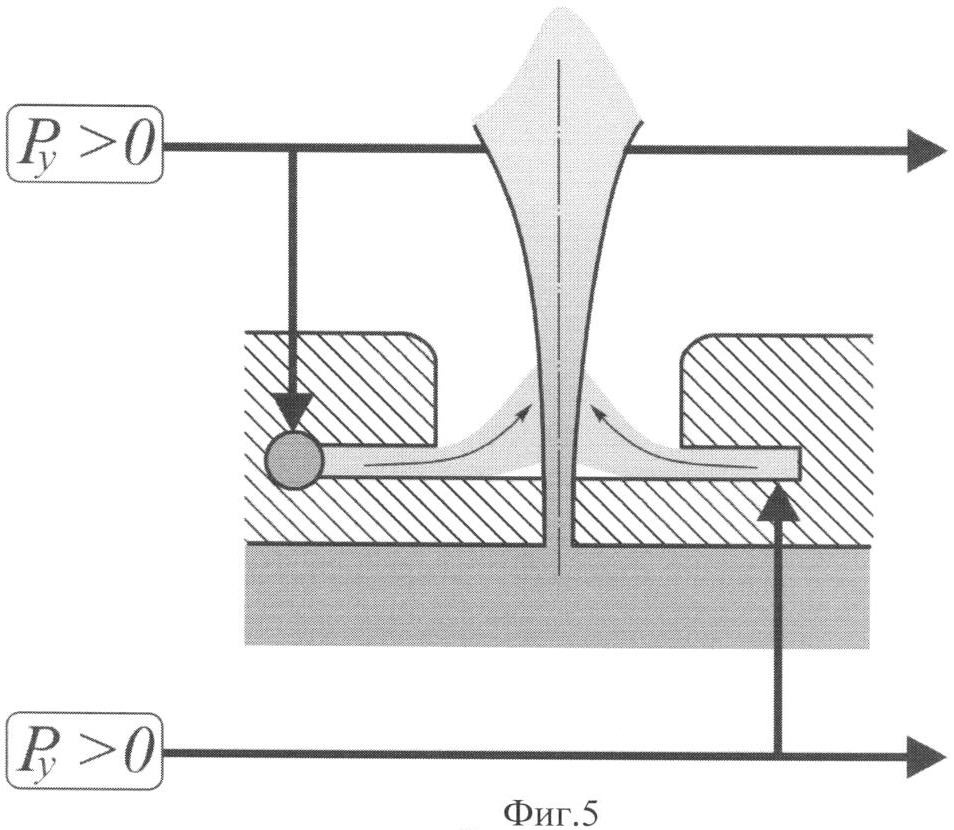
Изобретение относится к производственным системам транспортирования на воздушной подушке изделий при реализации различных технологических процессов. Может быть использовано на предприятиях с повышенными требованиями к качеству внешней поверхности изделий, на взрывопожароопасных предприятиях, а также в гибких автоматизированных производствах. Наиболее близким техническим решением является пневмоконвейер (А.С. Недостатками этой конструкции является то, что несущая поверхность снабжена подвижной пластиной, для перемещения которой необходим дополнительный механизм. Это делает конструкцию сложной и снижает надежность ее работы. Технической задачей предлагаемого изобретения является упрощение конструкции устройства, устранение подвижных механических элементов и повышение надежности ее работы. Поставленная задача достигается тем, что пневмоконвейер со струйным управлением, содержащий пневматическую камеру и расположенную над ней несущую поверхность, в которой выполнены перпендикулярно продольной ее осевой линии щелевые отверстия, сообщенные с пневматической камерой, согласно изобретению имеет несущую поверхность, снабженную центральным рядом прямоугольных карманов, в дне каждого из которых выполнено щелевое отверстие, параллельно которому в противоположных стенках прямоугольного кармана выполнены каналы управления. Технический результат от применения предлагаемого изобретения обусловлен тем, что в конструкции предлагаемого устройства отсутствуют подвижные механические элементы, что упрощает конструкцию и повышает надежность ее работы. Для управления струйными потоками в предлагаемом устройстве используются принципы, реализуемые в струйной автоматике, работа которой основана на различных аэродинамических эффектах, например, таком как эффект Коанда. Общий вид предлагаемого устройства представлен на чертеже, где на фиг.1 показан внешний вид устройства; на фиг.2 – чертеж устройства в двух проекциях с сечениями; на фиг.3, фиг.4, фиг.5 – положение струйного потока в кармане при различных величинах управляющих сигналов. Пневмоконвейер со струйным управлением имеет пневматическую камеру 1 и расположенную над ней несущую поверхность 2 с центральным рядом прямоугольных карманов 3. В дне каждого кармана 3 выполнено щелевое отверстие 4, параллельно которому в противоположных стенках этих карманов располагаются каналы управления 5. Левые каналы управления 5 относительно щелевого отверстия 4 объединены магистралью управления 6, а правые – магистралью управления 7. Транспортируемое изделие 8 располагается на несущей поверхности 2 на воздушной подушке. Устройство работает следующим образом. В пневматической камере 1 создается избыточное давление воздуха, которое заставляет воздух проходить через щелевые отверстия 4 и формировать плоские струи. Эти струи создают воздушную подушку под транспортируемым изделием 8. Для обеспечения направленного движения изделия 8 вдоль несущей поверхности 2 осуществляется наклон струй с помощью подачи управляющего пневматического сигнала в магистрали управления 6 и 7. Величина давления Ру пневматического сигнала управления определяет направление отклонения струй. Например, изделие 8 необходимо транспортировать вправо. Для этого в каждом кармане струя должна быть отклонена вправо, как это показано на фиг.3. Механизм отклонения заключается в следующем. В магистрали управления 6 создается избыточное давление Ру>0, а магистраль управления 7 перекрывается. Плоская струя, формируемая щелевым отверстием 4, за счет своей эжектирующей способности стремится создать вакуум в кармане 3. Но в полости кармана 3 слева от струи вакуум образоваться не сможет, так как сюда подается пневматический сигнал в виде воздушного потока с избыточным давлением Ру>0. В полости кармана 3 справа от струи вакуум образуется достаточно быстро, и струя под действием перепада давления отклонится вправо, «прилипнув» к стенке кармана 3 (фиг.3). Такое положение струй в каждом кармане 3 будет сохраняться до тех пор, пока не изменятся управляющие пневматические сигналы, подаваемые в магистрали управления 6 и 7. При подаче управляющего пневматического сигнала с избыточным давлением Ру>0 в магистраль управления 7 и перекрытия магистрали управления 6 струя в кармане 3 отклониться влево (фиг.4). При подаче управляющего пневматического сигнала с избыточным давлением Ру>0 одновременно в магистрали управления 6 и 7 будет получено вертикальное положение струи в кармане 3 (фиг.5). Используя пневматические управляющие сигналы можно обеспечить в предлагаемом устройстве для транспортируемых изделий 8 ускоренное движение, замедление, равномерное движение и реверс.
Формула изобретения
Пневмоконвейер со струйным управлением, содержащий пневматическую камеру и расположенную над ней несущую поверхность, в которой выполнены перпендикулярно продольной ее осевой линии щелевые отверстия, сообщенные с пневматической камерой, отличающийся тем, что несущая поверхность снабжена центральным рядом прямоугольных карманов, в дне каждого из которых выполнено щелевое отверстие, параллельно которому в противоположных стенках прямоугольного кармана выполнены каналы управления.
РИСУНКИ
|
||||||||||||||||||||||||||
 856945, М. Кл3. В65G 51/00, 23.08.1981 в бюл.
856945, М. Кл3. В65G 51/00, 23.08.1981 в бюл.