Патент на изобретение №2373093
|
||||||||||||||||||||||||||
(54) УСТРОЙСТВО ПОВЫШЕНИЯ КАЧЕСТВА КОНТРОЛЯ ПОДВИЖНОГО СОСТАВА
(57) Реферат:
Изобретение относится к автоматике и предназначено для использования в многофункциональном комплексе технических средств для диагностики подвижного состава. Устройство содержит напольное оборудование, включающее основные и вспомогательные напольные камеры, устройство контроля габарита подвижного состава, электронную педаль, датчики счета осей, триангуляционный лазерный датчик. Триангуляционный лазерный датчик установлен с возможностью распознавания рельефа поверхности буксового узла и расположен в корпусе основной напольной камеры и центрирован с оптической осью болометра. Техническим результатом изобретения является расширение функциональных возможностей. 7 ил.
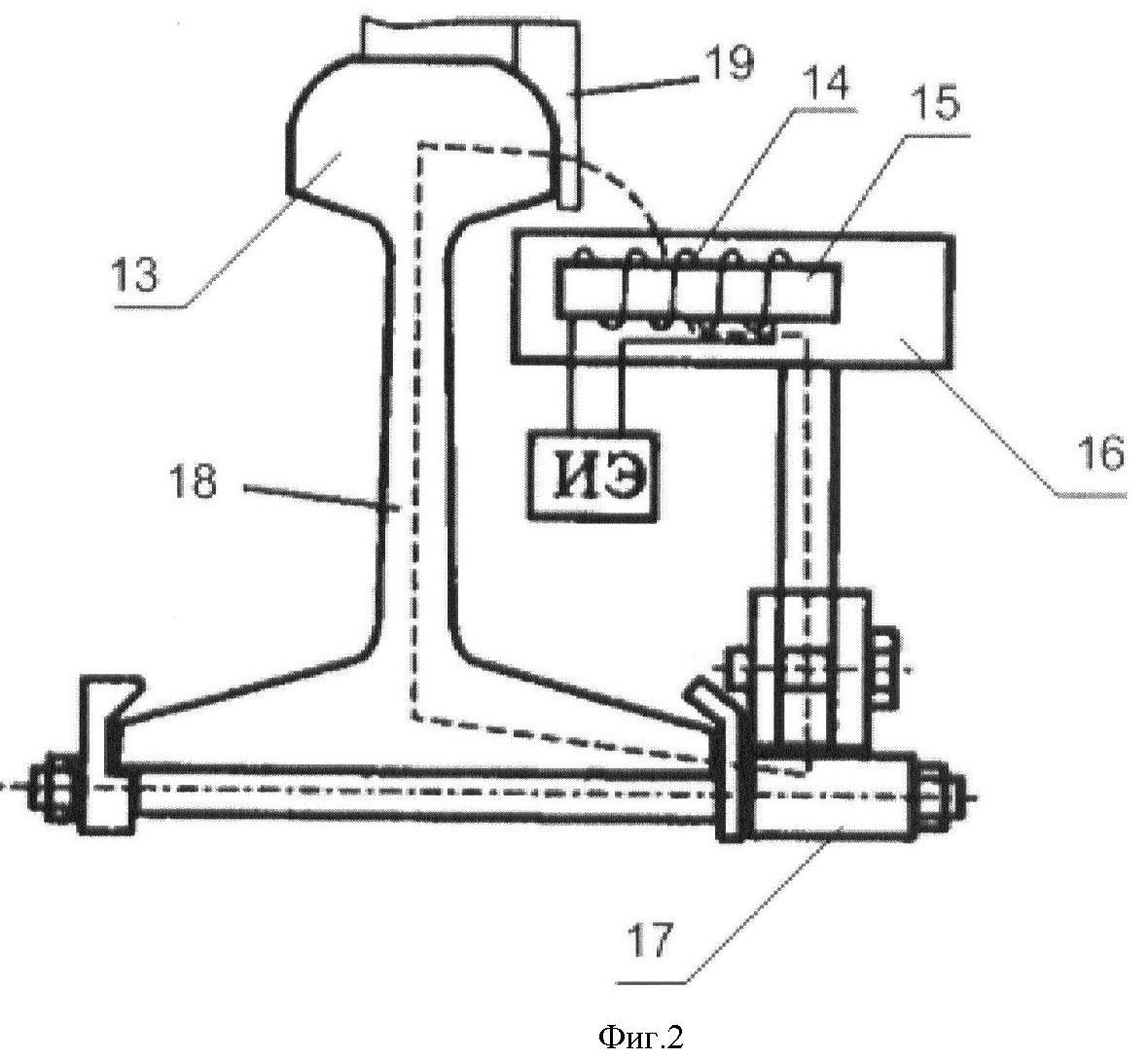
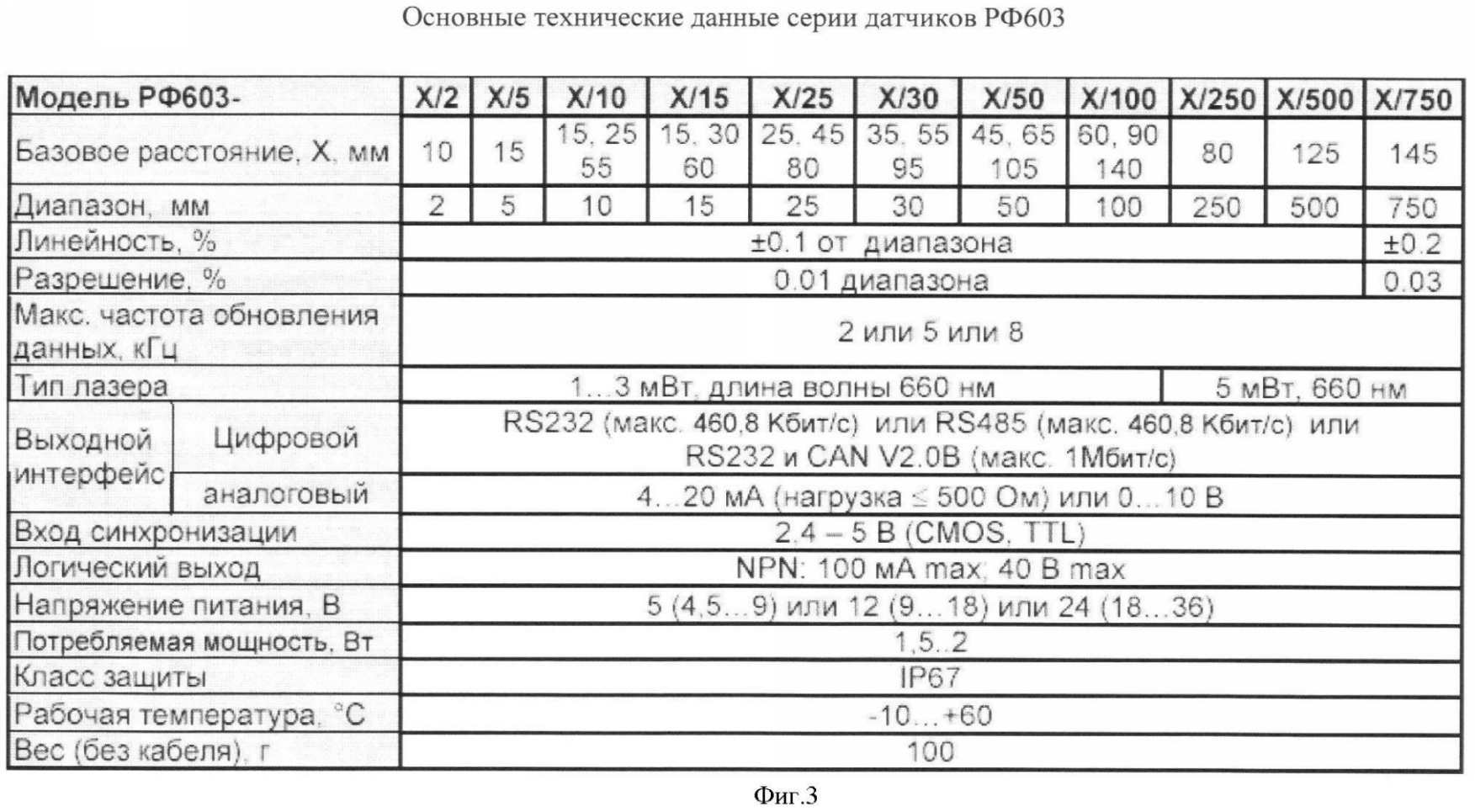
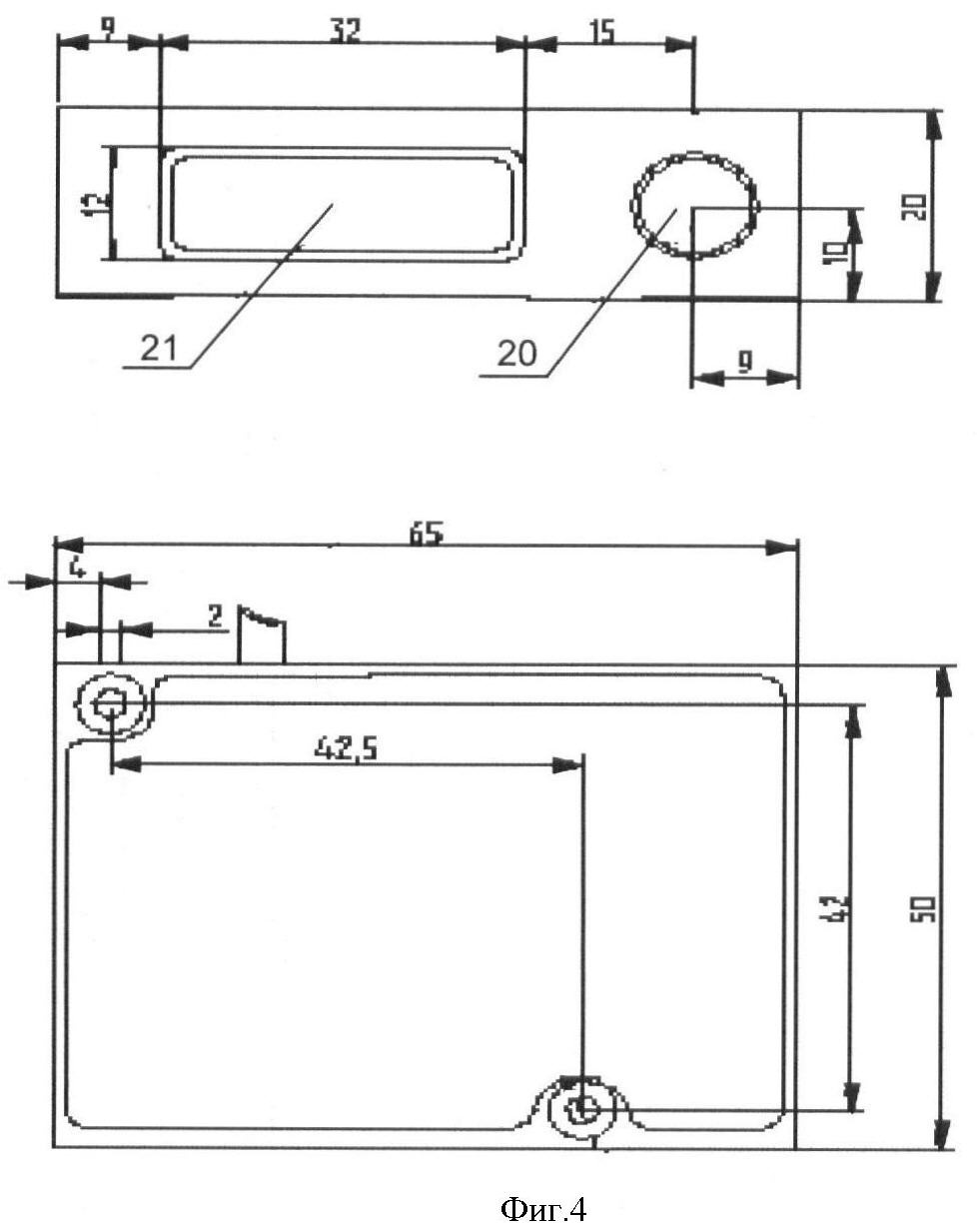
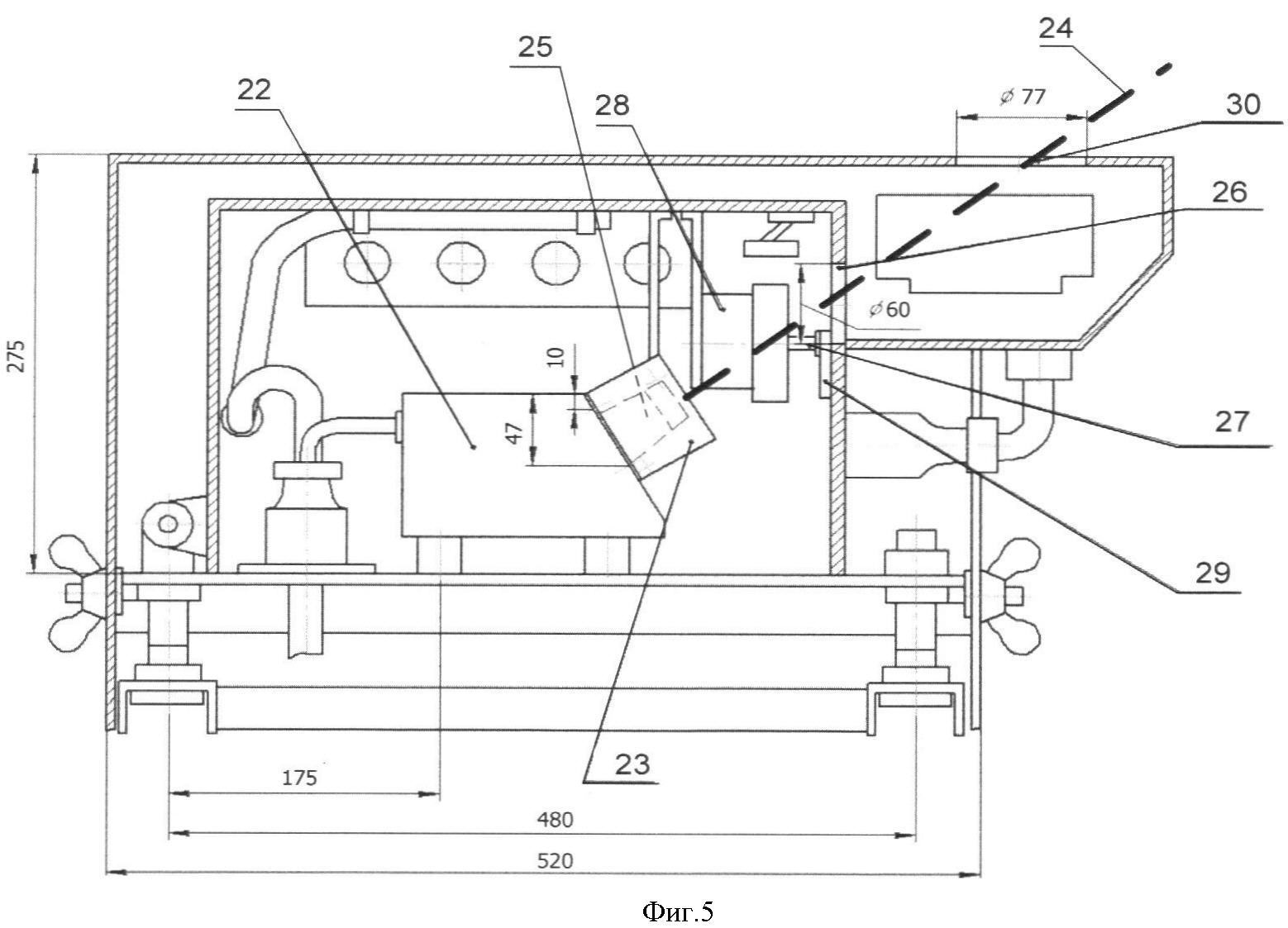
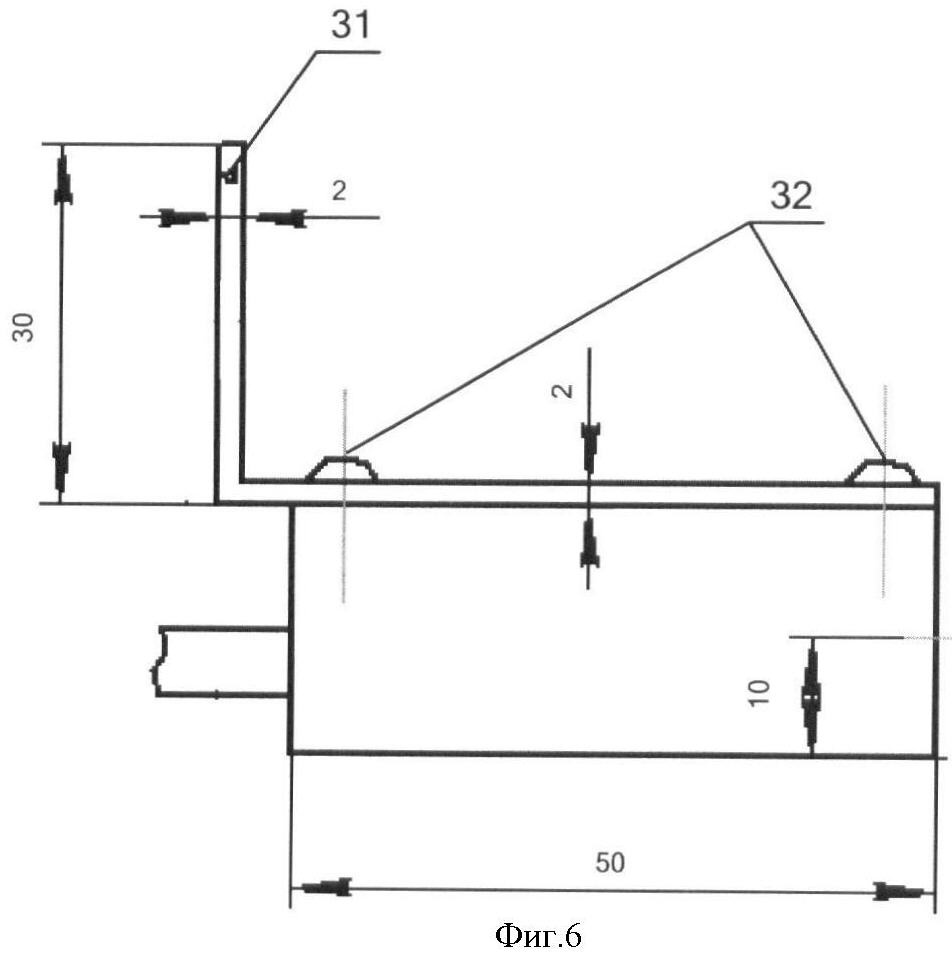
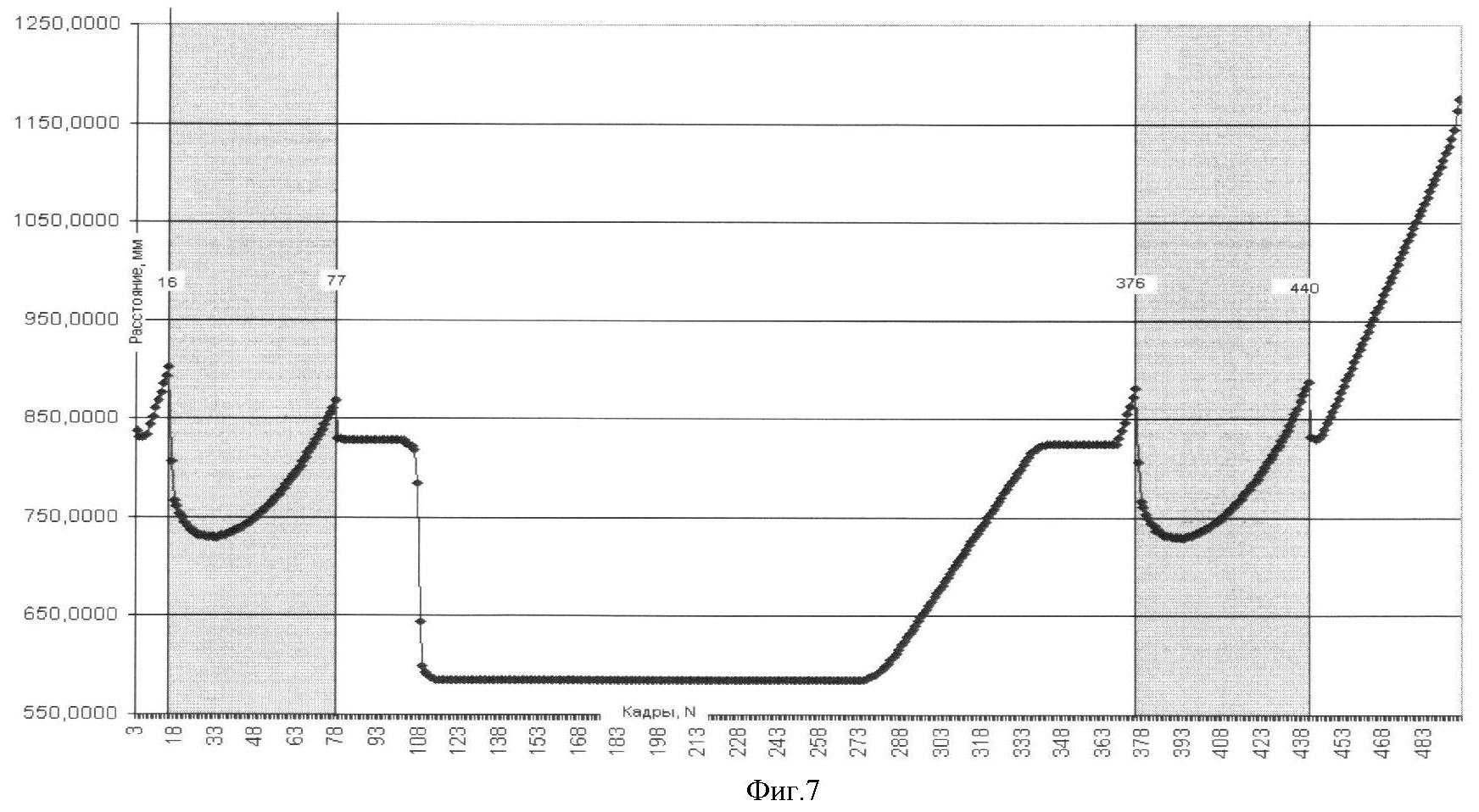
Предлагаемое изобретение относится к автоматике и предназначено для использования в многофункциональном комплексе технических средств для диагностики подвижного состава КТСМ – 02. Известен комплекс КТСМ-02, являющийся системой автоматического контроля технического состояния (диагностики) подвижного состава, состоящей из подсистем обнаружения неисправностей буксовых узлов колесных пар, тормозного и автосцепного оборудования, волочащихся деталей, нарушения бокового или верхнего габарита и др. Средства диагностики состоят из перегонного 10 и станционного 9 оборудования, соединенных кабельной линией связи 12 (фиг.1). Перегонное оборудование делится на напольное 11 и постовое 8. Напольное оборудование 11 устанавливается непосредственно на пути и предназначено для считывания информации с подвижного состава: реализует способ контроля исправности буксовых узлов подвижного состава по уровню инфракрасной энергии, излучаемой корпусом буксового узла в окружающее пространство. Напольное оборудование включает: считывающие устройства – основные 1 и вспомогательные 2 напольные камеры (ОНК и ВНК) с приемниками ИК-излучения (болометрами), датчики прохода колесных пар 3, 4, 5, датчик наличия поезда в зоне контроля 7 (рельсовая цепь наложения), устройство контроля схода подвижного состава 6. В момент захода поезда на участок контроля обесточивается рельсовая цепь наложения, датчики вырабатывают электрические сигналы при проходе колесных пар подвижных единиц в зоне их размещения. Считывание производится в моменты нахождения колесных пар в зоне действия приемника. По сигналам от датчиков осуществляется счет осей и подвижных единиц в поезде, а также определяются моменты начала и окончания прохода в поле зрения приемников ИК-излучения колесных пар, т.е. сигналы от датчиков выделяют по отношению к измерительному тракту пространство или длину стробирования. Попадание буксового узла в это пространство (при правильной установке датчика) зависит от двух причин – скорости буксового узла (скорости подвижного состава) и постоянной времени срабатывания датчика (время от момента прохода колесной пары до выработки электрического сигнала) (см. Техническая документация на аппаратуру КТСМ-02 (ЗАО «НПЦ-ИНФОТЭКС», г.Екатеринбург)). В рассматриваемой системе диагностики подвижного состава применяются магнитоиндукционные датчики. Конструктивно магнитоиндукционный датчик прохода колес (см. фиг.2) состоит из магнитной головки 16 и крепежного устройства 17 и устанавливается внутри колеи на подошве рельса. Внутри магнитной головки на стальном основании установлена катушка 14 с находящимся внутри нее постоянным магнитом 15. При установке расстояние от головки рельса 13 до датчика выбирается таким, чтобы при проходе колеса воздушный зазор между гребнем 19 и магнитом был минимальным, но достаточным для исключения механического контакта даже при максимально возможном прокате колеса. Принцип действия датчика основан на явлении электромагнитной индукции. При отсутствии колеса в зоне установки датчика магнитный поток 18 постоянного магнита замкнут через крепежное устройство, рельс и воздушный зазор между головкой рельса и одним из полюсов. При проходе гребня колеса 19 в воздушном зазоре происходит изменение магнитного потока следующим образом: сначала, когда величина воздушного зазора уменьшается, магнитный поток увеличивается и достигает своего максимального значения в момент нахождения центра колеса над центром датчика; затем, когда величина воздушного зазора увеличивается, магнитный поток уменьшается и достигает исходного значения в момент выхода колеса из воздушного зазора (из зоны действия датчика). При возрастании магнитного потока в катушке индуцируется ЭДС, создающая импульс напряжения колоколообразной формы положительной полярности, при убывании магнитного потока индуцируемая в катушке ЭДС создает импульс напряжения отрицательной полярности. Однако анализ статистических данных работы системы КТСМ-02 определил ряд существенных недостатков применения магнитоиндукционных датчиков прохода колес: 1) датчики прохода колес имеют большую постоянную времени срабатывания ( 2) при резких торможениях, увеличении скорости, неоднократных колебаниях скорости подвижного состава на участке контроля, при прохождении поездом контрольного участка со скоростью меньше 30 км/ч наблюдаются устойчивые сбои в счете осей подвижного состава; 3) необходимость частой регулировки положения датчиков; 4) частые повреждения датчиков при возникновении непосредственного контакта последних с ободами колес подвижного состава. Таким образом, целями изобретения являются: – уменьшение количества ложных показаний аппаратурой КТСМ-02; – повышение стабильности и точности работы датчиков счета осей; – улучшение эксплуатационно-технических показателей аппаратуры КТСМ-02 в целом. Поставленные цели достигаются применением в аппаратуре КТСМ-02 лазерного датчика расстояния, работающего по принципу оптической триангуляции (триангуляционный лазерный датчик). Сущность изобретения поясняется чертежами, где на фиг.3 приведены основные технические данные лазерных датчиков расстояния; на фиг.4 изображены габаритные и установочные размеры датчика; на фиг.5 показана схема установки оптического датчика на приемную капсулу; на фиг.6 показаны установочные размеры алюминиевого уголка для крепления лазерного датчика на приемную капсулу; на фиг.7 – профиллограмма поверхности тележки при ориентации оптического датчика на нижнюю часть корпуса буксового узла. Выбор бесконтактного датчика можно сделать, руководствуясь следующими критериями: – материал объекта измерения; – расстояние до объекта измерения; – скорость движения объекта измерения; – тип выходного сигнала; – габариты датчика. Оптические датчики, работающие по принципу оптической триангуляции, в отличие от других оптодатчиков позволяют измерять расстояния в широком диапазоне – от очень малого до метра и больше. Эти датчики обладают высокой точностью и скоростью измерения на больших расстояниях, отличаются хорошими характеристиками выходного сигнала и нетребовательны к геометрии объекта измерения, его материалу. Габариты оптических датчиков незначительны, и поэтому их монтаж можно осуществить практически в любых условиях. Воздействие внешних неблагоприятных условий (дождь снег, град, частицы, поднимаемые сильным ветром), безусловно, влияет на показания датчиков, однако это влияние минимально и точность измерений практически не изменяется, так как в алгоритме работы датчика заложена возможность проводить интегральные измерения при довольно большой частоте измерений (количество точек усреднения). Таким образом, использование оптических бесконтактных датчиков для распознавания рельефа поверхности буксового узла наиболее предпочтительно, поскольку именно этот тип датчиков отвечает основным требованиям. Для применения в системе КТСМ-02 предлагается использовать модель датчика – РФ603-Х/750 фирмы «РИФТЭК». Основные технические данные и характеристики приведены в табличной форме на фиг.3. Габаритные и установочные размеры датчика на фиг.4. Корпус датчика выполнен из анодированного алюминия. На передней панели корпуса расположены два окна: одно – выходное 20, другое – для приема излучения 21, отраженного от контролируемого объекта (см. фиг.4). Для установки в оборудование корпус датчика содержит крепежные отверстия. Датчик устанавливается таким образом, чтобы контролируемый объект располагался в зоне рабочего диапазона датчика. Кроме того, в области прохождения падающего на объект и отраженного от него излучения не должно находиться посторонних предметов. При контроле объектов сложной формы и текстуры необходимо минимизировать попадание зеркальной составляющей отраженного излучения во входное окно датчика. В основу работы датчика положен принцип оптической триангуляции. Принцип триангуляционного метода измерений достаточно хорошо описан в соответствующей литературе, поэтому здесь не рассматривается. Данные от датчика (результаты измерений) могут быть получены по последовательному интерфейсу и/или на аналоговом выходе. По последовательному интерфейсу результаты можно получить как по разовым запросам, так и автоматически потоком данных. Установку оптического датчика необходимо произвести внутрь напольной камеры с целью обеспечения оптимальных температурных условий работы. Оптический датчик крепится внутри напольной камеры на корпус приемной капсулы 22, при монтаже необходимо соблюсти центровку установки датчика 23 с оптической осью 24 болометра 25 согласно установочным размерам (см. фиг.5). Выходное окно напольной камеры 26 необходимо увеличить до размера, указанного на фиг.5, это необходимо для того, чтобы лазер датчика визировался на корпус буксового узла через выходное окно напольной камеры и выходное окно кожуха 30. Заслонка 27 открывается электромагнитом 28 через тягу 29 согласно стандартной работе напольного оборудования КТСМ-02. Крепление корпуса датчика к корпусу приемной капсулы осуществляется с помощью алюминиевого уголка 31 (А6 (60×30×2)×65 ГОСТ 13738-91) с отверстиями под винты (см. фиг.6). Компьютерное моделирование работы оптического бесконтактного датчика. Измерение расстояний оптическим бесконтактным датчиком при прохождении участка контроля тележкой 18-100 было имитировано средствами компьютерного моделирования. Модель тележки была выполнена в виде двух боковых рам тележки с колесными парами и буксовыми узлами. Целью компьютерного моделирования являлось выяснение возможности распознавания поверхности буксового узла при прохождении участка контроля. При прохождении тележкой участка контроля датчиком снимается профиллограмма (см. фиг.7) всей поверхности тележки (боковая рама, буксовый узел). На ней выделены темным цветом две зоны, где расстояние измеряется до поверхности двух буксовых узлов – зоны буксового узла. Как видно из профиллограммы, зоны первого и второго по ходу поезда буксовых узлов резко выделяются на фоне поверхности тележки, это связано с расстояниями между буксой и тележкой. Форма профиллограммы полностью идентична форме выходного аналогового сигнала на выходе оптического датчика. Распознавание поверхности буксового узла с помощью оптического бесконтактного датчика. Рельеф поверхности буксового узла постоянен и известен нам по размерам буксового узла. Для распознавания поверхности буксы необходимо составить набор параметрических кривых, получаемых при измерении расстояния до буксы, форма этих кривых полностью определяется геометрией поверхности буксового узла и зависит от расположения измерителя – оптического датчика (относительно буксы). Кривые могут быть рассчитаны аналитически либо на основе моделирования для всех типов буксовых узлов – локомотивов, грузовых вагонов, пассажирских вагонов, электропоездов. Алгоритм распознавания может быть построен на основе сопоставления профиллограммы, получаемой при работе датчика с формой заранее известных параметрических кривых, а также с помощью контроля координаты расстояния до поверхности буксового узла. Контроль координаты можно осуществить, задавая диапазон изменения координаты по времени, в который попадает «скачок» при переходе к поверхности буксового узла, а также задавая диапазон изменения производной координаты по времени. Таким образом, применение оптических датчиков расстояния в аппаратуре КТСМ-02 обеспечивает наличие признаков новизны с одновременным расширением функциональных возможностей и достижением значительной компактности напольного оборудования, что позволяет достичь целей изобретения, обозначенных выше. Основным графическим материалом, поясняющим конструктивную суть изобретения, является фиг.5, функциональная сущность изобретения поясняется на фиг.7. Список литературы 1. Техническая документация на аппаратуру КТСМ-02 (ЗАО «НПЦ-ИНФОТЭКС», г.Екатеринбург).
Формула изобретения
Устройство контроля технического состояния подвижного состава, содержащее напольное оборудование, включающее основные и вспомогательные напольные камеры, устройство контроля габарита подвижного состава, электронную педаль, датчики счета осей, отличающееся тем, что содержит триангуляционный лазерный датчик, установленный с возможностью распознавания рельефа поверхности буксового узла, расположенный в корпусе основной напольной камеры и центрированный с оптической осью болометра.
РИСУНКИ
|
||||||||||||||||||||||||||
 =2.5 мс), размер этой постоянной велик, поскольку при больших скоростях начало стробирования будет приходиться не на момент прохода колесной пары через датчик счета осей, а значительно позже, также будет смещен и конец стробирования, а это влечет за собой то, что сканирование будет продолжаться не с поверхности буксового узла, а с других областей (боковая рама тележки, рама вагона, при отсутствии пола в раме – с неба, солнце);
=2.5 мс), размер этой постоянной велик, поскольку при больших скоростях начало стробирования будет приходиться не на момент прохода колесной пары через датчик счета осей, а значительно позже, также будет смещен и конец стробирования, а это влечет за собой то, что сканирование будет продолжаться не с поверхности буксового узла, а с других областей (боковая рама тележки, рама вагона, при отсутствии пола в раме – с неба, солнце);