Патент на изобретение №2367921
|
||||||||||||||||||||||||||
(54) ДВУХСТЕПЕННОЙ СТЕНД ДЛЯ ЗАДАНИЯ УГЛОВЫХ КОЛЕБАНИЙ
(57) Реферат:
Изобретение относится к области приборостроения и может быть использовано для оценки динамических погрешностей малогабаритных инерциальных систем при необходимости их использования в навигационных приборах и других приборах управления. Устройство содержит раскачивающуюся в двух плоскостях платформу, установленную на крестообразном подвесе, датчики углового положения платформы по каждой оси и два двигателя с редукторами, соединенные с кривошипно-кулисными механизмами, преобразующими вращательные движения двигателей в угловые движения платформы и расположенными на неподвижном основании. Кроме того, устройство содержит подшипник качения, передающий платформе угловые колебания от кривошипно-кулисного механизма по одной из осей без модуляции колебаниями платформы по второй оси. Технический результат заключается в возможности воспроизводства угловых колебаний качающейся платформы в двух ортогональных плоскостях, изменяющихся по гармоническому закону в расширенном частотном диапазоне. 2 ил.
Изобретение относится к области приборостроения, в частности к испытательному оборудованию измерительных приборов, и может быть использовано для оценки динамических погрешностей малогабаритных инерциальных навигационных систем.
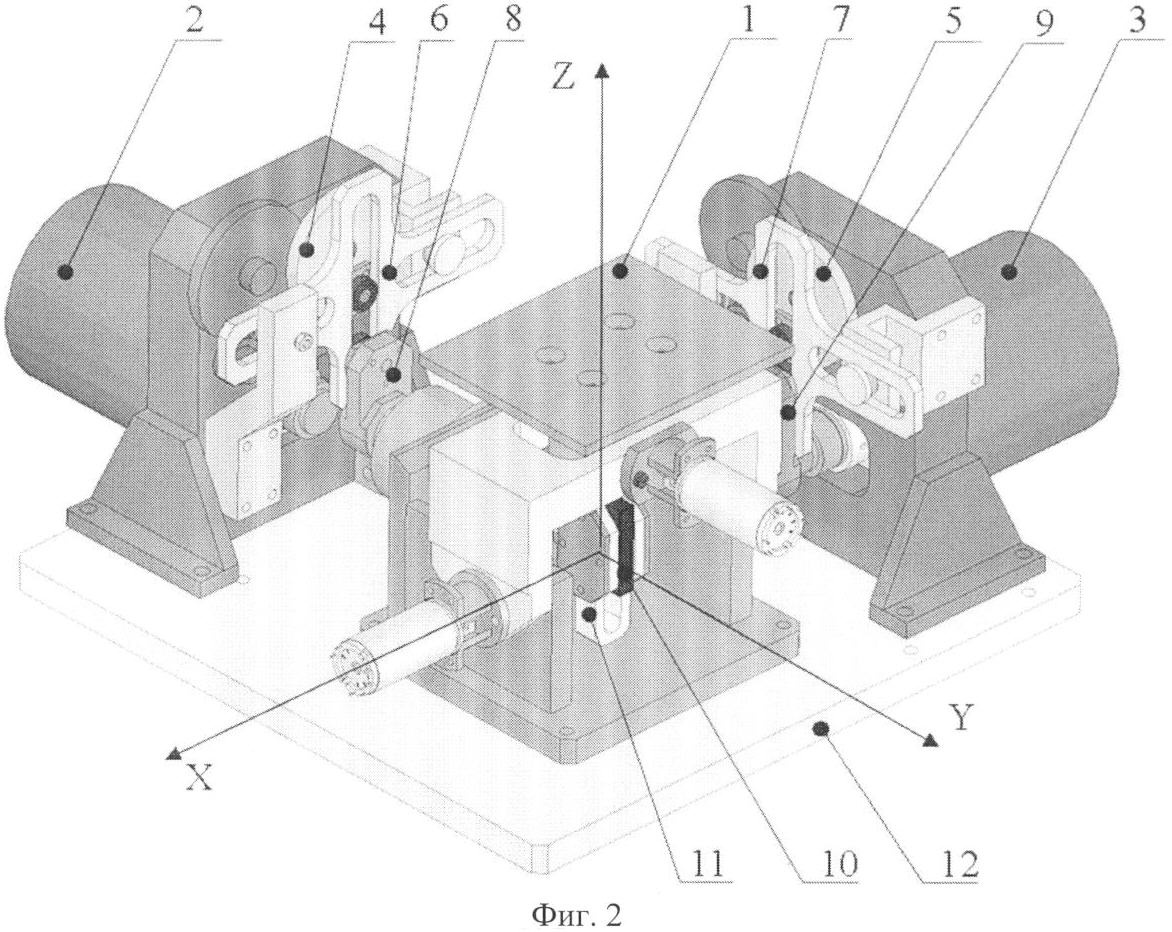
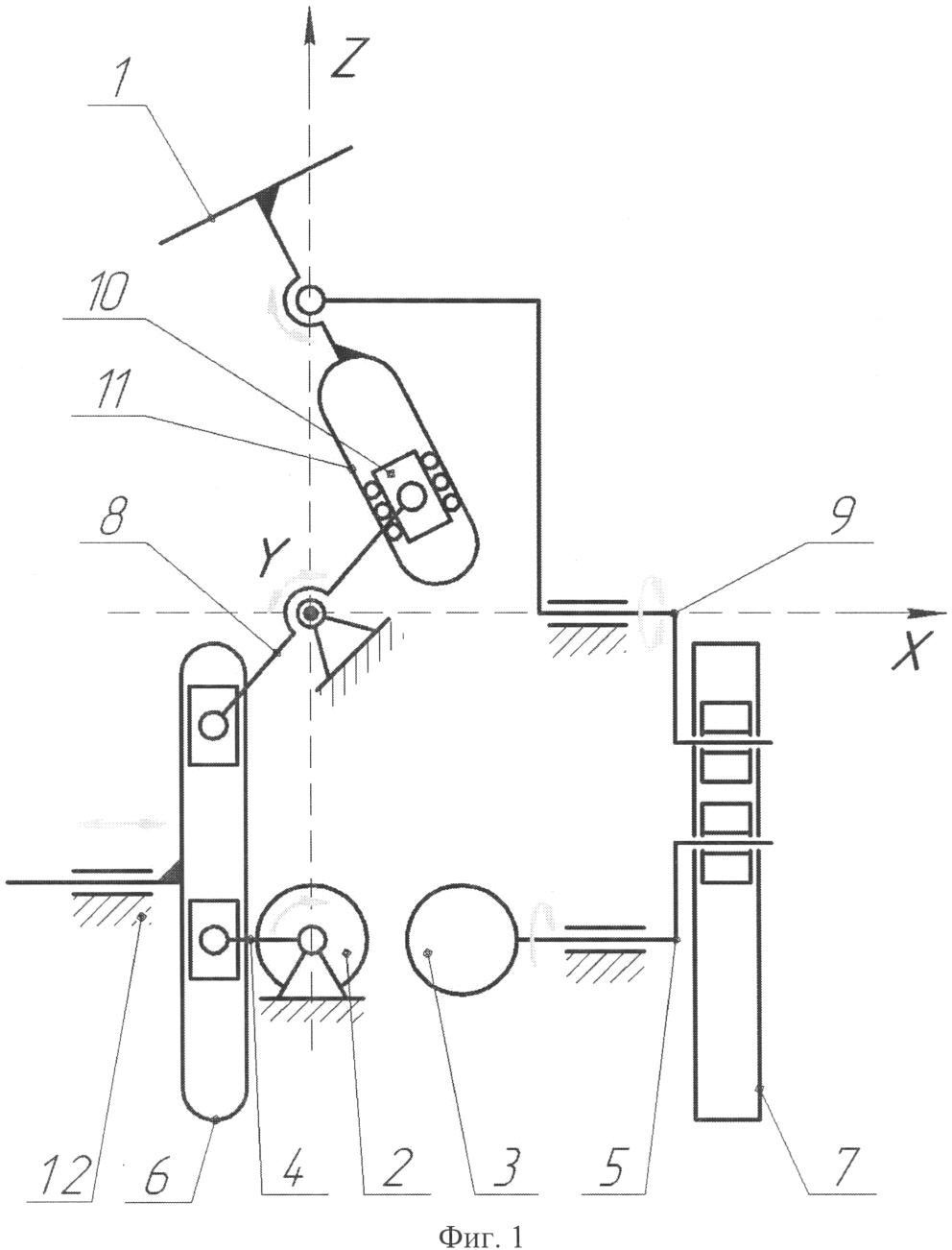
Основным недостаткам указанного устройства является модуляция колебаний одной оси колебаниями второй оси. Указанное явление связано с наличием зависимости амплитуды колебаний от текущего углового положения по ортогональной оси, вызванное тем, что двигатели и механизмы, обеспечивающие задание колебаний, расположены на неподвижном основании устройства. Размещение двигателя второй оси на качающейся платформе может устранить этот недостаток, но одновременно приведет к увеличению подвижной массы, а значит к ухудшению динамических характеристик устройства. В качестве второго недостатка следует отметить, что преобразование вращательного движения двигателя в угловые движения платформы с помощью кривошипно-шатунного механизма приводит к искажениям формы гармонического сигнала, зависящим от соотношения длины кривошипа к длине шатуна. При увеличении соотношения длины кривошипа к длине шатуна с целью снижения гармонических искажений воспроизводимых колебаний значительно возрастают габариты устройства, что также можно отнести к недостаткам прототипа. Задачей изобретения является создание малогабаритного стенда, позволяющего в двух ортогональных плоскостях воспроизводить угловые колебания качающейся платформы, изменяющиеся по гармоническому закону в расширенном частотном диапазоне в каждой из плоскостей. Поставленная задача решается тем, что в устройство, содержащее раскачивающуюся в двух плоскостях платформу, установленную на крестообразном подвесе, датчики углового положения платформы по каждой оси и два двигателя с редукторами дополнительно введены кривошипно-кулисные механизмы и подшипник качения (ГОСТ 24955-81). На фиг.1 приведена кинематическая схема, на фиг.2 приведен общий вид устройства, где 1 – качающаяся платформа для установки испытуемого прибора, 2 и 3 – двигатели с редукторами по каждой из осей соответственно, 4 и 5 – кривошипы, 6 и 7 – кулисы, 8 и 9 – коромысла, 10 – ползун, 11 – направляющая, 12 – неподвижное основание. Принцип работы устройства заключается в том, что круговое движение кривошипов 4 и 5, приводимых в движение двигателями с редукторами 2 и 3, передается кулисам 6 и 7, совершающим относительно неподвижного основания возвратно-поступательные движения, которые затем передаются коромыслам 8 и 9, совершающим относительно неподвижного основания 12 угловые колебания вокруг ортогональных осей Х и Y. Коромысло 9 жестко связано с качающейся платформой 1 и задает ее угловые колебания вокруг оси X. Коромысло 8 передает угловые колебания вокруг оси Y направляющей 11, жестко скрепленной с качающейся платформой 1, через ползун 10. Соединение ползуна 10 с направляющей 11 представляет собой подшипник качения, который обеспечивает три степени подвижности направляющей 11 относительно ползуна 10, а именно их относительное вращение вокруг оси Х и линейные перемещения вдоль осей Y и Z. Расположение двигателей 2, 3 и кривошипно-кулисных механизмов 4, 5, 6, 7 на неподвижном основании 12 устройства позволяет значительно расширить динамический диапазон работы устройства за счет снижения момента инерции движущихся частей. Применение кривошипно-кулисных механизмов для преобразования вращательного движения двигателей в угловые колебания платформы не приводит к искажению формы гармонических колебаний платформы, а также позволяет снизить габариты устройства в целом. Использование шарнирного подшипника качения для передачи движения на одну из осей позволяет избавиться от взаимной модуляции колебаний между осями. В результате появляется возможность воспроизводить угловые колебания качающейся платформы в двух ортогональных плоскостях, изменяющиеся по гармоническому закону в расширенном частотном диапазоне.
Формула изобретения
Двухстепенной стенд для задания угловых колебаний в двух ортогональных плоскостях, изменяющихся по гармоническому закону в расширенном частотном диапазоне, содержащий раскачивающуюся в двух плоскостях платформу, установленную на крестообразном подвесе, датчики углового положения платформы по каждой оси и два двигателя с редукторами, отличающийся тем, что в него дополнительно введены кривошипно-кулисные механизмы, преобразующие вращательные движения двигателей в угловые движения платформы и расположенные на неподвижном основании, и подшипник качения, передающий платформе угловые колебания от кривошипно-кулисного механизма по одной из осей без модуляции колебаниями платформы по второй оси.
РИСУНКИ
|
||||||||||||||||||||||||||
 1, с.87-88. SU 993093 А1 30.01.1983. SU 1272140 A1 23.11.1986. SU 645047 А1 30.01.1979.
1, с.87-88. SU 993093 А1 30.01.1983. SU 1272140 A1 23.11.1986. SU 645047 А1 30.01.1979.