Патент на изобретение №2366972
|
||||||||||||||||||||||||||
(54) СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ СБЛИЖЕНИЯ МАНЕВРЕННОГО ЛЕТАТЕЛЬНОГО АППАРАТА С РАДИОЭЛЕКТРОННОЙ СИСТЕМОЙ СОПРОВОЖДЕНИЯ В РЕЖИМЕ РАДИОМОЛЧАНИЯ НА ОСНОВЕ ИСПОЛЬЗОВАНИЯ ПАРАМЕТРОВ ЕГО КРИВОЛИНЕЙНОГО ДВИЖЕНИЯ
(57) Реферат:
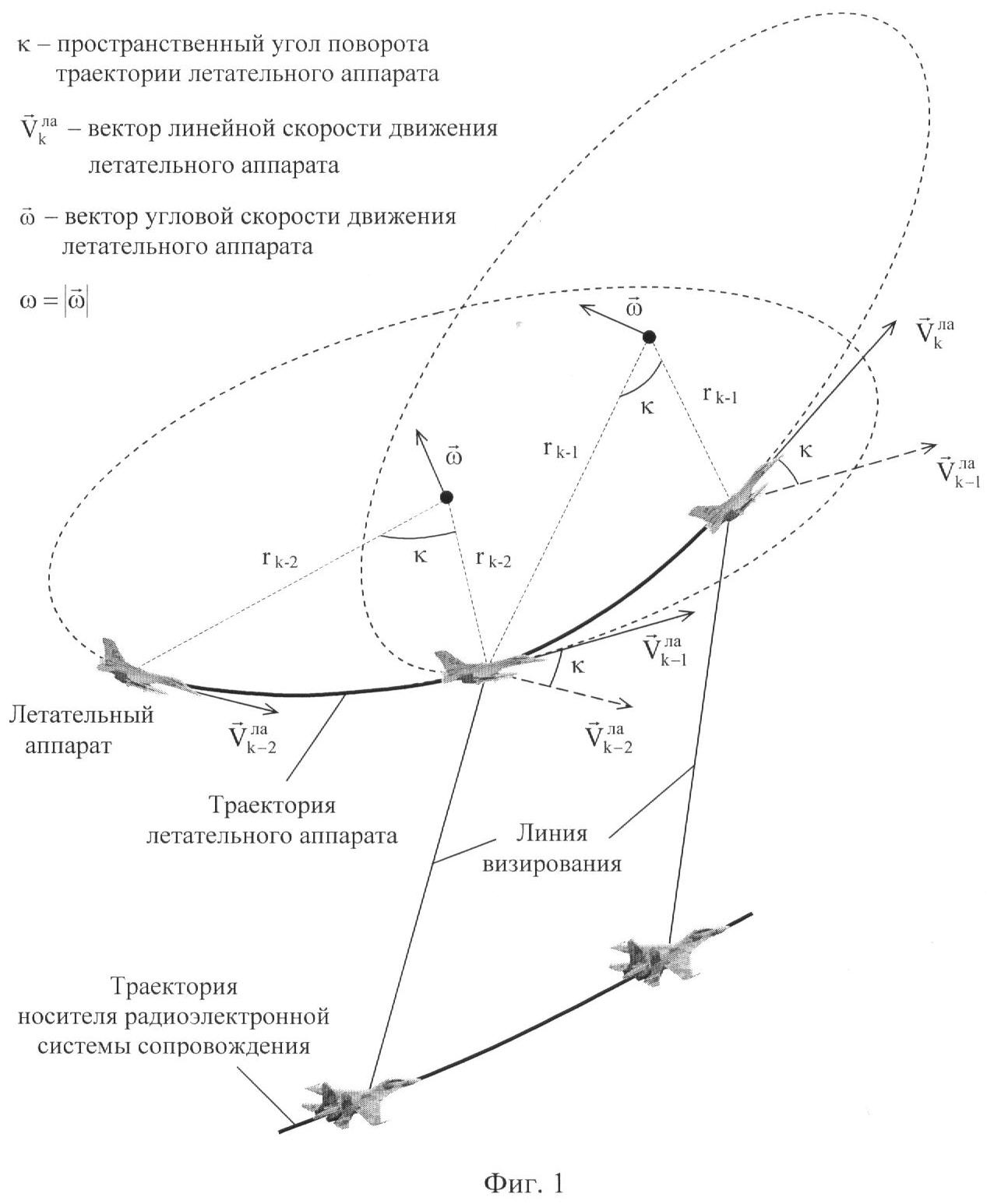
Изобретение относится к области радиотехники, в частности к радиоэлектронным системам измерения координат, и может быть использовано в бортовых и наземных радиоэлектронных системах сопровождения. Достигаемым техническим результатом изобретения является повышение точности определения скорости сближения маневренного летательного аппарата с радиоэлектронной системой сопровождения в режиме радиомолчания. Сущность изобретения заключается в том, что для определения скорости сближения маневренного летательного аппарата с радиоэлектронной системой сопровождения используются параметры его криволинейного движения: радиус окружности, по дуге которой движется летательный аппарат относительно радиоэлектронной системы сопровождения, изменение значения которого описывается экспоненциально коррелированным процессом, и угловая скорость движения летательного аппарата, значение которой принимается постоянным. 3 ил.
Изобретение относится к области радиотехники, в частности к радиоэлектронным системам измерения координат, и может быть использовано в бортовых и наземных радиоэлектронных системах сопровождения (РЭСС). Известен способ определения скорости сближения маневренного летательного аппарата (ЛА) с РЭСС в режиме радиомолчания (см. Фарина А., Студер Ф. Цифровая обработка радиолокационной информации. Сопровождение целей: пер. с англ. – М.: Радио и связь, 1993. – 320 с.). Сущность данного способа состоит в следующем. Скорость сближения маневренного ЛА с РЭСС в k-й момент времени Vk определяют через скорость и ускорение сближения ЛА с РЭСС в (k-1)-й момент времени Vk-1 и ak-1 соответственно, в предположении, что данное ускорение постоянно:
где Т – интервал дискретизации; значения скорости и ускорения сближения маневренного ЛА с РЭСС в начальный момент времени функционирования РЭСС в режиме радиомолчания V0 и а0 соответственно, определяют при работе РЭСС в активном режиме. Недостатком данного способа является низкая точность определения скорости сближения маневренного ЛА с РЭСС вследствие несоответствия принятого постоянным ускорения сближения ЛА с РЭСС реальной динамике данного ускорения.
Сущность способа, принятого за прототип, состоит в том, что скорость сближения маневренного ЛА с РЭСС в k-й момент времени Vk определяют через скорость и ускорение сближения ЛА с РЭСС в (k-1)-й момент времени Vk-i и ak-1 соответственно, в предположении, что данное ускорение описывается экспоненциально коррелированным процессом:
где Т – интервал дискретизации; Недостатком способа, принятого за прототип, является низкая точность определения скорости сближения маневренного ЛА с РЭСС вследствие несоответствия модели изменения скорости, характеризуемой параметрами прямолинейного движения, реальной динамике скорости маневренного ЛА. Техническим результатом предлагаемого способа является повышение точности определения скорости сближения маневренного ЛА с РЭСС в режиме радиомолчания на основе использования параметров его криволинейного движения. Сущность предлагаемого способа заключается в том, что скорость сближения маневренного ЛА с РЭСС в k-й момент времени Vk определяют через скорость сближения в (k-1)-й момент времени Vk-1, через радиус окружности, по дуге которой движется ЛА относительно РЭСС в (k-1)-й момент времени, rk-1, изменение значения которого описывается экспоненциально коррелированным процессом, и через угловую скорость движения ЛА
где Т – интервал дискретизации; µ – величина, обратная постоянной времени маневра ЛА; nrk – гауссовский шум с дисперсией Результаты проведенных исследований параметров движения маневренного ЛА (истребителя) показали, что угловая скорость движения истребителя изменяется в небольшом диапазоне значений, что обусловлено спецификой его применения. Поэтому допущение о постоянстве угловой скорости движения маневренного ЛА На основе экспериментальных данных для маневренного ЛА типа «истребитель» было определено, что Физический смысл угловой скорости движения маневренного ЛА Предлагаемый способ определения скорости сближения маневренного ЛА с РЭСС в режиме радиомолчания на основе использования параметров его криволинейного движения реализуется как программно на электронно-вычислительной машине, так и аппаратно при помощи соответствующих устройств. Один из вариантов программной реализации предлагаемого способа представлен на фигуре 2 при помощи логической схемы алгоритма функционирования программы определения скорости сближения маневренного ЛА с РЭСС в режиме радиомолчания на основе использования параметров его криволинейного движения. Логическая схема состоит из блока «Данные» I; блока «Подготовка» II; блоков «Процесс» III, IV, V; блока «Запоминаемые данные» VI; блоков «Оперативное запоминающее устройство» VII, VIII. В блоке I устанавливаются исходные значения параметров µ, Т, Форма записи выражений в вычислительных блоках II, III, IV, V приведена для вычислительной среды Mathcad 2000. Один из вариантов аппаратной реализации предлагаемого способа представлен на фигуре 3 при помощи функциональной схемы устройства определения скорости сближения маневренного ЛА с РЭСС в режиме радиомолчания на основе использования параметров его криволинейного движения. Устройство состоит из схемы вычитания 1; схемы деления 2; схем умножения 3, 4, 5, 10; схем сложения 6, 11; линий задержки на Т 7, 8, 13; схемы вычисления экспоненты 9; генератора шума 12. Работа устройства осуществляется следующим образом. На первый вход схемы вычисления экспоненты 9 поступает сигнал µ, а на второй вход – сигнал Т; с выхода схемы вычисления экспоненты 9 сигнал Результаты проведенных исследований подтверждают целесообразность применения на практике предлагаемого способа определения скорости сближения маневренного ЛА с РЭСС в режиме радиомолчания на основе использования параметров его криволинейного движения.
Формула изобретения
Способ определения скорости сближения маневренного летательного аппарата с радиоэлектронной системой сопровождения в режиме радиомолчания на основе использования параметров его криволинейного движения, отличающийся тем, что скорость сближения маневренного летательного аппарата с радиоэлектронной системой сопровождения в k-й момент времени Vk определяют через скорость сближения в (k-1)-й момент времени Vk-1, через радиус окружности, по дуге которой движется летательный аппарат относительно радиоэлектронной системы сопровождения в (k-1)-й момент времени, rk-1, изменение значения которого описывается экспоненциально коррелированным процессом, и через угловую скорость движения летательного аппарата, принимаемую постоянной,
РИСУНКИ
|
||||||||||||||||||||||||||
 8, с.40-57. RU 2303797 C2, 27.07.2007. RU 2310909 С1, 20.11.2007. RU 2282157 С2, 20.08.2006. US 2005114025 A1, 26.05.2005. CA 2635817 A1, 30.08.2007. US 6118401 A, 12.09.2000.
8, с.40-57. RU 2303797 C2, 27.07.2007. RU 2310909 С1, 20.11.2007. RU 2282157 С2, 20.08.2006. US 2005114025 A1, 26.05.2005. CA 2635817 A1, 30.08.2007. US 6118401 A, 12.09.2000.



 – величина, характеризующая скорость изменения ускорения; nak – гауссовский шум с дисперсией
– величина, характеризующая скорость изменения ускорения; nak – гауссовский шум с дисперсией  и математическим ожиданием ma=0 м/с2;
и математическим ожиданием ma=0 м/с2;  a – среднеквадратическое отклонение (СКО) ускорения; значения скорости и ускорения сближения маневренного ЛА с РЭСС в начальный момент времени функционирования РЭСС в режиме радиомолчания V0 и а0 соответственно, определяют при работе РЭСС в активном режиме; принимают, что отсчет гауссовского шума в начальный момент времени функционирования РЭСС в режиме радиомолчания имеет значение na0=ma=0 м/с2.
a – среднеквадратическое отклонение (СКО) ускорения; значения скорости и ускорения сближения маневренного ЛА с РЭСС в начальный момент времени функционирования РЭСС в режиме радиомолчания V0 и а0 соответственно, определяют при работе РЭСС в активном режиме; принимают, что отсчет гауссовского шума в начальный момент времени функционирования РЭСС в режиме радиомолчания имеет значение na0=ma=0 м/с2. , принимаемую постоянной:
, принимаемую постоянной:

 подается на второй вход схемы умножения 10 и второй вход схемы вычитания 1, на первый вход которой поступает сигнал «1»; с выхода схемы вычитания 1 сигнал 1-ехр{-µ·Т} подается на первый вход схемы деления 2, на второй вход которой поступает сигнал µ; с выхода схемы деления 2 сигнал (1-ехр{-µ·Т})/µ подается на первый вход схемы умножения 3, на второй вход которой поступает сигнал rk-1 с выхода линии задержки на Т 8; также с выхода линии задержки на Т 8 сигнал rk-1 подается на первый вход схемы умножения 10; с выхода схемы умножения 10 сигнал rk-1·ехр{-µ·Т} поступает на первый вход схемы сложения 11, на второй вход которой подается сигнал nrk-1 с выхода линии задержки на Т 13, на вход которой поступает сигнал nrk с выхода генератора шума 12, на первый вход которого подается сигнал mr, а на второй вход – сигнал
подается на второй вход схемы умножения 10 и второй вход схемы вычитания 1, на первый вход которой поступает сигнал «1»; с выхода схемы вычитания 1 сигнал 1-ехр{-µ·Т} подается на первый вход схемы деления 2, на второй вход которой поступает сигнал µ; с выхода схемы деления 2 сигнал (1-ехр{-µ·Т})/µ подается на первый вход схемы умножения 3, на второй вход которой поступает сигнал rk-1 с выхода линии задержки на Т 8; также с выхода линии задержки на Т 8 сигнал rk-1 подается на первый вход схемы умножения 10; с выхода схемы умножения 10 сигнал rk-1·ехр{-µ·Т} поступает на первый вход схемы сложения 11, на второй вход которой подается сигнал nrk-1 с выхода линии задержки на Т 13, на вход которой поступает сигнал nrk с выхода генератора шума 12, на первый вход которого подается сигнал mr, а на второй вход – сигнал 

 r и математическим ожиданием mr=269 м;
r и математическим ожиданием mr=269 м;