Патент на изобретение №2359227
|
||||||||||||||||||||||||||
(54) СПОСОБ СВЕТОЛОКАЦИОННОГО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ
(57) Реферат:
Изобретение относится к лазерной импульсной локационной дальнометрии. Способ светолокационного определения дальности до цели методом некогерентного накопления, включающий серию циклов, в каждом из которых на цель посылают лазерный зондирующий импульс, квантуют время на дискреты, принимают отраженный целью импульс, вырабатывают в каждой из дискрет времени гипотезу об отсутствии или наличии сигнала путем порогового преобразования принятой смеси сигнала и шума, формирования соответствующего гипотезе числа и накопления формируемых чисел в виде сумм для каждой дискреты времени, по завершении серии циклов выделяют те дискреты времени, в которых накопленная сумма превышает заданное число, по этим накопленным суммам формируют оценку дальности до цели. При этом предварительно проводят калибровку. Технический результат изобретения заключается в увеличении точности измерения дальности в широком диапазоне амплитуд принимаемых сигналов. 2 ил.
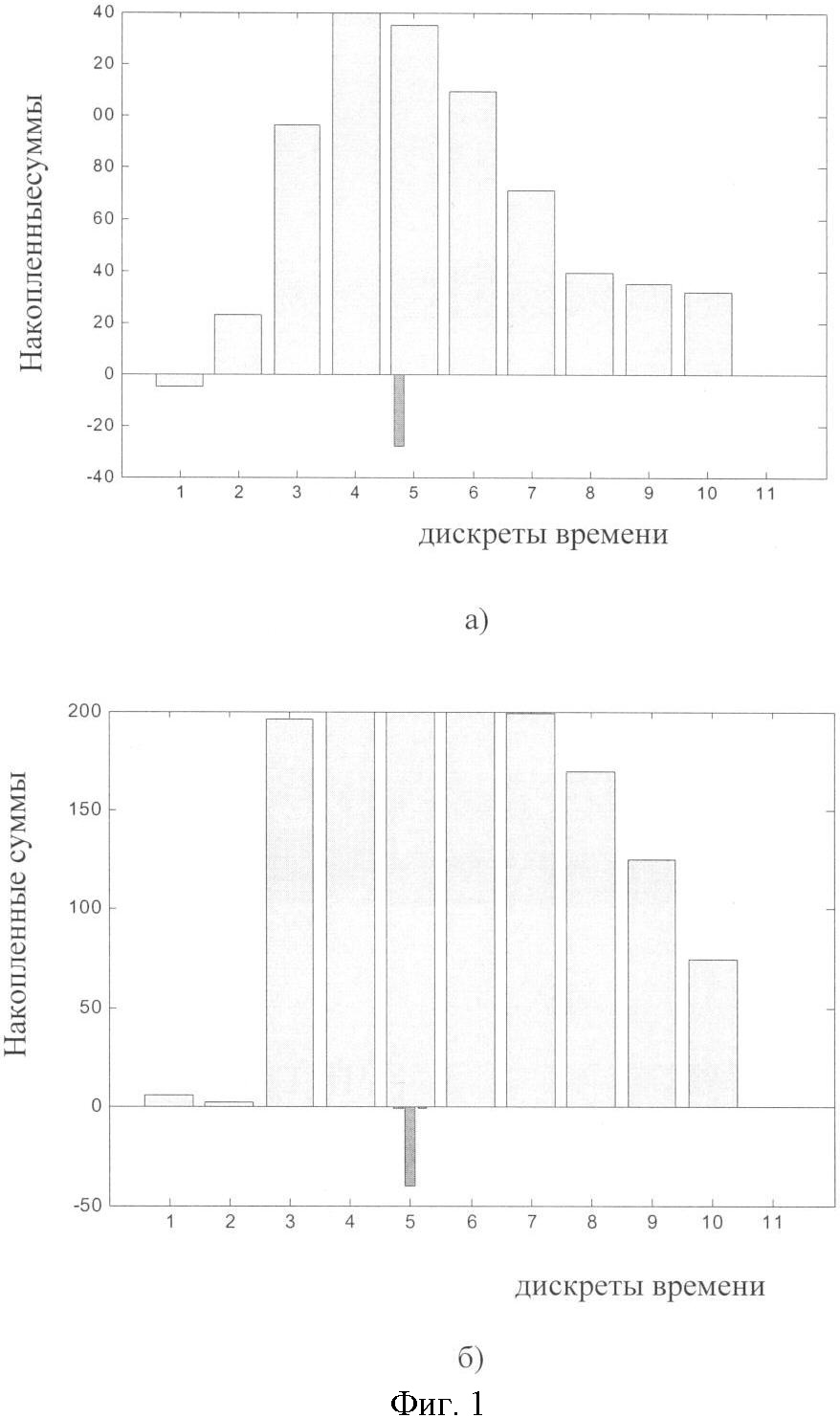
Изобретение относится к лазерной технике, а именно к лазерной импульсной локационной дальнометрии. Известен способ светолокационного определения дальности до цели [1]. Указанный способ заключается в том, что посылают на цель лазерный зондирующий импульс, принимают отраженный целью сигнал и определяют временной интервал между зондирующим и отраженным импульсами, по которому судят о дальности до цели. Этот способ не может быть реализован при использовании полупроводниковых лазеров, предпочтительных для портативной аппаратуры, вследствие их недостаточной мощности. Наиболее близким по технической сущности к предлагаемому способу является способ светолокационного определения дальности до цели методом некогерентного накопления, включающий серию циклов, в каждом из которых на цель посылают лазерный зондирующий импульс, квантуют время на дискрет, принимают отраженный целью импульс, вырабатывают в каждой из дискрет времени гипотезу об отсутствии или наличии сигнала путем порогового преобразования принятой смеси сигнала и шума, формирования соответствующего гипотезе числа и накопления формируемых чисел в виде сумм для каждой дискреты времени, по завершении серии циклов выделяют те дискреты времени, в которых накопленная сумма превышает заданное число, и по этим накопленным суммам формируют оценку дальности до цели [2]. В указанном способе осуществляется процедура цифрового некогерентного накопления [3], реализующая метод статистической проверки гипотез [4]. Недостатком этого способа является зависимость оценки дальности до цели от амплитуды отраженного целью сигнала. При большом отношении сигнал/порог в каждом цикле подтверждается гипотеза о наличии сигнала, и накопленные суммы принимают максимально возможное значение, равное числу циклов в серии. Вследствие этого при длительности зондирующего сигнала, превышающей несколько дискрет времени, конфигурация накопленных массивов данных нелинейно зависит от амплитуды принимаемых сигналов, что приводит к изменению оценки дальности. Задачей изобретения является повышение точности определения дальности в широком диапазоне амплитуд принимаемых сигналов. Поставленная задача решается за счет того, что в известном способе светолокационного определения дальности до цели методом некогерентного накопления, включающем серию циклов, в каждом из которых на цель посылают лазерный зондирующий импульс, квантуют время на дискреты, принимают отраженный целью импульс, вырабатывают в каждой из дискрет времени гипотезу об отсутствии или наличии сигнала путем порогового преобразования принятой смеси сигнала и шума, формирования соответствующего гипотезе числа и накопления формируемых чисел в виде сумм для каждой дискреты времени, по завершении серии циклов выделяют те дискреты времени, в которых накопленная сумма превышает заданное число, по этим накопленным суммам формируют оценку дальности до цели, предварительно проводят калибровку, в процессе которой определяют истинное значение дальности до цели, изменяют амплитуду отраженных целью импульсов в пределах рабочего динамического диапазона, для каждого значения амплитуды определяют оценку дальности, ее смещение относительно истинного значения и сумму накопленных сумм в дискретах времени, находящихся в окрестности дискреты времени с максимальной накопленной суммой, а при рабочем определении дальности после формирования оценки дальности определяют сумму накопленных сумм в дискретах времени, находящихся в окрестности дискреты времени с максимальной накопленной суммой, и в зависимости от этой суммы накопленных сумм вводят в оценку дальности поправку, равную по абсолютной величине и обратную по знаку соответствующему смещению оценки, определенному при калибровке. На фиг.1а, б приведены примеры заполнения массива данных после накопления соответственно при отношении сигнал/шум 1 и 10. На фиг.2 представлен пример зависимости оценки задержки от амплитуды сигнала и ее смещения. Проведен анализ предлагаемого способа для режима двухуровневого накопления при следующих исходных данных. Объем накопления N=200 циклов. Отношение амплитуды сигнала к величине среднеквадратического отклонения Уровни первого и второго аналоговых порогов соответственно равны + Длительность сигнала по основанию tи=6 Длительность переднего фронта сигнала tфр=2 В рассматриваемом примере задержку отраженного сигнала определяют как первый начальный момент [5] массива накопленных сумм, а оценку дальности R формируют согласно зависимости R=сТз/2, где с – скорость света. Как следует из фиг.1а, б, оценка задержки принимаемого сигнала по предлагаемому способу (показана индексом на временной оси) изменяет свое положение в широком диапазоне амплитуд принимаемого сигнала (при отношении сигнал/шум от порогового до уровня переполнения каналов накопителя в нескольких смежных дискретах времени) на величину около 0,5 дискреты времени. Для рассмотренного примера получена зависимость требуемой поправки от суммы накопленных сумм SS в окрестности k-й дискреты времени, в которой накопленная сумма Sk максимальна. Исправленная оценка дальности R*=R+
где R – неисправленная оценка дальности;
Sk – текущая накопленная сумма в k-й дискрете времени, наибольшая по сравнению с накопленными суммами в соседних дискретах времени; Sk max – предельно возможное значение накопленной суммы; а – коэффициент, определяемый предварительно при калибровке; SS – сумма накопленных сумм; Sj – накопленная сумма в j-й дискрете времени; j – текущий индекс; S0 – коэффициент, определяемый предварительно при калибровке. На фиг.2 область введения поправки ограничена значением S~20, поскольку, во-первых, это соответствует максимальному значению SS, учитываемому при формировании оценки (7), а, во-вторых, при отношении сигнал/шум >10-20 целесообразно формировать оценку дальности не по накопленному массиву, а путем прямой временной фиксации принятого сигнала. По сравнению со способами светолокационного определения дальности, в которых не учитывается поправка на величину принимаемого сигнала, предлагаемый способ позволяет в несколько раз уменьшить систематическую ошибку измерения дальности. В рассмотренном выше примере это позволяет уменьшить систематическую ошибку примерно на порядок, благодаря чему реальная погрешность измерения дальности может быть снижена до 0,05 м при ширине дискреты времени 6,67 нс, что соответствует тактовой частоте 150 МГц и дискретности по дальности 1 м. При этом среднеквадратическая погрешность измерения дальности Таким образом, предлагаемый способ светолокационного измерения дальности позволяет обеспечить более высокую точность измерения дальности в широком диапазоне амплитуд принимаемых сигналов. Источники информации 1. В.А.Волохатюк, В.М.Кочетков, P.P.Красовский «Вопросы оптической локации». – М.: Советское радио, 1971 г., стр.177. 2. Международная заявка WO 2005/006016 – прототип. 3. Я.Д.Ширман, В.Н.Манжос «Теория и техника обработки радиолокационной информации на фоне помех». – М.: Радио и связь, 1981 г., стр.81-83. 4. В.Е.Гмурман «Теория вероятностей и математическая статистика». – М.: Высшая школа, 1977 г., стр.281. 5. И.Н.Бронштейн, К.А.Семендяев «Справочник по математике для инженеров и учащихся втузов». – М.: Наука, 1986 г., стр.446.
Формула изобретения
Способ светолокационного определения дальности до цели методом некогерентного накопления, включающий серию циклов, в каждом из которых на цель посылают лазерный зондирующий импульс, квантуют время на дискреты, принимают отраженный целью импульс, вырабатывают в каждой из дискрет времени гипотезу об отсутствии или наличии сигнала путем порогового преобразования принятой смеси сигнала и шума, формирования соответствующего гипотезе числа и накопления формируемых чисел в виде сумм для каждой дискреты времени, по завершении серии циклов выделяют те дискреты времени, в которых накопленная сумма превышает заданное число, по этим накопленным суммам формируют оценку дальности до цели, отличающийся тем, что предварительно проводят калибровку, в процессе которой определяют истинное значение дальности до цели, изменяют амплитуду отраженных целью импульсов в пределах рабочего динамического диапазона, для каждого значения амплитуды определяют оценку дальности, ее смещение относительно истинного значения и сумму накопленных сумм в дискретах времени, находящихся в окрестности дискреты времени с максимальной накопленной суммой, а при рабочем определении дальности после формирования оценки дальности определяют сумму накопленных сумм в дискретах времени, находящихся в окрестности дискреты времени с максимальной накопленной суммой, и, в зависимости от этой суммы накопленных сумм, вводят в оценку дальности поправку, равную по абсолютной величине и обратную по знаку соответствующему смещению оценки, определенному при калибровке.
РИСУНКИ
|
||||||||||||||||||||||||||
 шума от 1 до 200.
шума от 1 до 200. Т, где
Т, где 
 R в серии зондирования N=200 циклов и дискрете дальности
R в серии зондирования N=200 циклов и дискрете дальности