Патент на изобретение №2352988
|
||||||||||||||||||||||||||
(54) СПОСОБ КОРРЕКЦИИ ХРОМАТИЧЕСКОЙ АБЕРРАЦИИ ОПТИЧЕСКОЙ ПОДСИСТЕМЫ СИСТЕМЫ ТЕХНИЧЕСКОГО ЗРЕНИЯ
(57) Реферат:
Изобретение относится к вычислительной технике и может быть использовано для коррекции хроматической аберрации оптических подсистем систем технического зрения, применяемых для контроля автоматизированных процессов. Техническим результатом, на достижение которого направлено данное изобретение, является повышения точности коррекции хроматической аберрации оптической подсистемы. Технический результат достигается за счет того, что способ коррекции хроматической аберрации включает ввод изображения в ЭВМ, определение истинных положений точек R и В цветовых каналов изображения по формуле
где x, y – координаты точки изображения, x’R, y’R, x’B, y’B – координаты истинных положений точек R и В цветовых каналов изображения, r – радиальное расстояние до точки изображения, r’R, r’B – радиальные расстояния до истинных положений точек R и В цветовых каналов изображения, cB(1), сB(2),
Изобретение относится к вычислительной технике и может быть использовано для коррекции хроматической аберрации оптических подсистем систем технического зрения, использующих в качестве приемников изображения матричные приемники изображения. Известен оптический способ коррекции хроматической аберрации [Chromatic aberration correction element and its application [Text]: pat. 801459 United States: G02B 003/08; G02B 005/18/ Maruyama, Koichi, Asahi; 1997]. Сущность этого изобретения заключается в создании объектива, содержащего исправляющий элемент, который является простой линзой, имеющей одну асферическую поверхность, радиус искривления которой увеличивается от оптической оси к периферии. Описанный способ позволяет производить коррекцию хроматической аберрации в известных объективах только с определенными конструкционными параметрами. Ввод в объектив дополнительных исправляющих элементов сложен с технической точки зрения и увеличивает его массогабаритные показатели. Основным недостатком данного способа является невозможность коррекции аберрации в существующих объективах без внесения изменений в их конструкцию, а также невозможность коррекции аберрации после получения изображения. Наиболее близким является способ коррекции хроматической аберрации оптической системы [Apparatus and method for producing images without distortion and lateral color aberration [Text]: pat. 6747702 United States: H04N 5/217/ Michael E.; 2004], согласно которому производится коррекция хроматической аберрации путем масштабирования цветовых каналов изображения. Для этого производится разложение исходного изображения на цветовые каналы (R, G, В – каналы красного, зеленого и синего цвета соответственно). Затем определяются радиальные расстояния до истинных положений точек R и В каналов изображения (положений, которые занимали бы точки цветовых каналов изображения в случае отсутствия хроматической аберрации) с использованием заранее определенных для каждого из каналов коэффициентов коррекции. Далее рассчитываются координаты точек R и В каналов изображения, соответствующие полученным радиальным расстояниям. Так как изображение дискретно, производится округление найденных координат. Значения яркости каналов в исходной точке изображения заменяются на соответствующие значения в найденных точках. Недостатком данного способа является низкая точность коррекции хроматической аберрации, обусловленная погрешностью определения исправленных значений яркости R и В цветовых каналов в точках исходного изображения по округленным значениям координат положений этих точек, что вызвано дискретностью изображения. Технической задачей изобретения является повышение точности коррекции хроматической аберрации оптической подсистемы системы технического зрения. Техническая задача решается тем, что в известный способ коррекции хроматической аберрации оптической подсистемы системы технического зрения, включающий ввод изображения в ЭВМ, определение истинных положений точек R и В цветовых каналов изображения осуществляется по формуле
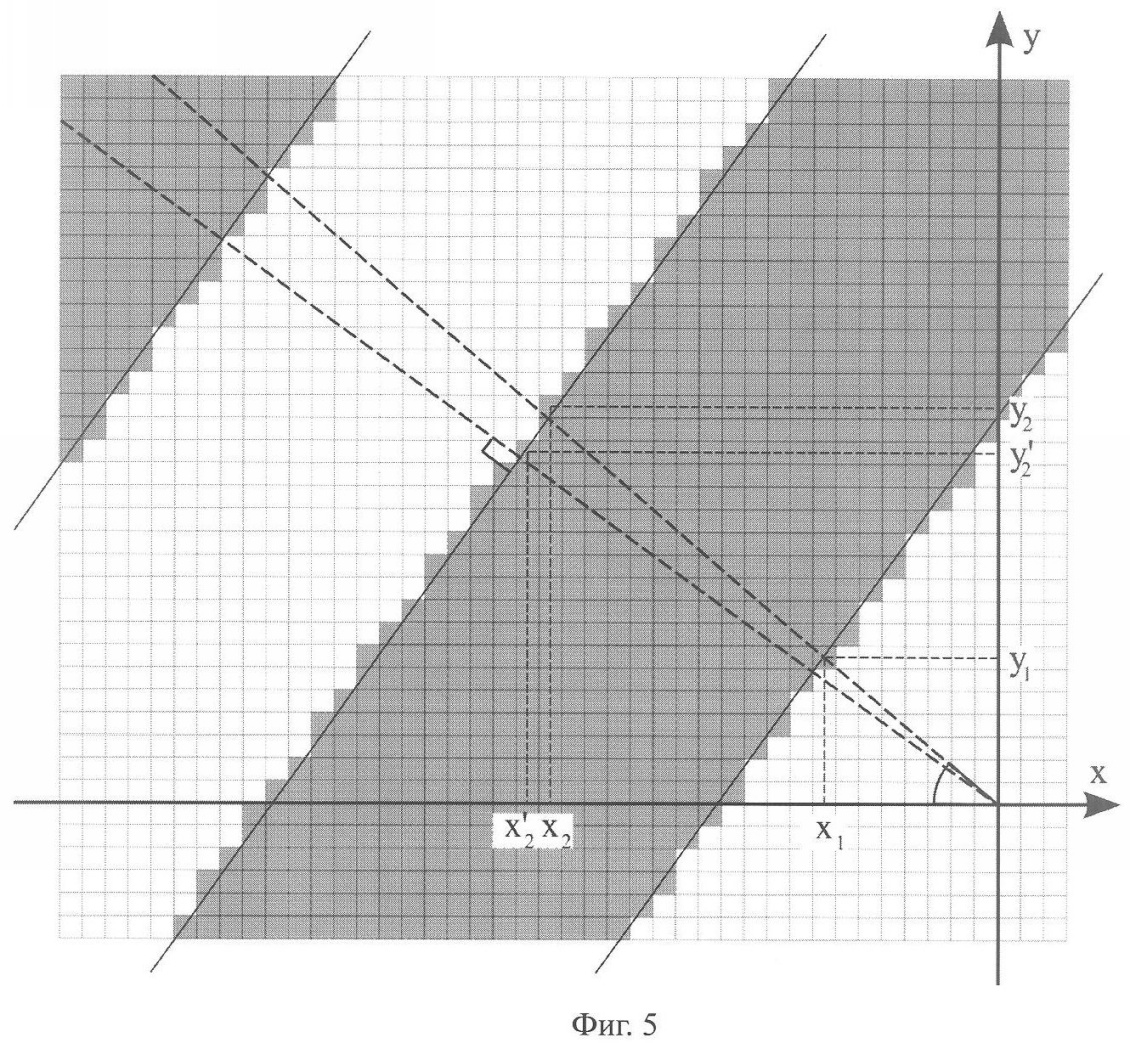
где x, y – координаты точки изображения, х’R, y’R, х’B, y’B – координаты истинных положений точек R и В цветовых каналов изображения, r – радиальное расстояние до точки изображения, r’B, r’B – радиальные расстояния до истинных положений точек R и В цветовых каналов изображения, cB(l), cB(2), Изобретение может быть использовано для коррекции хроматической аберрации оптических подсистем систем технического зрения, применяемых для контроля автоматизированных процессов, в системах видеонаблюдения. Сущность изобретения поясняется чертежами, где на фиг.1 показан калибровочный объект, на фиг.2 – изображение калибровочного объекта в системе координат камеры, на фиг.3 – блок-схема алгоритма определения коэффициентов коррекции хроматической аберрации, фиг.4 и фиг.5 поясняют нахождение калибровочных точек, на фиг.6 изображена блок-схема алгоритма коррекции хроматической аберрации, фиг.7 поясняет определение значений яркости в истинных положениях точек R и В цветовых каналов изображения. Калибровочный объект состоит прямоугольников черного цвета, расположенных на белом фоне, стороны которых параллельны (фиг.1). Калибровочный объект располагают перпендикулярно главной оптической оси камеры таким образом, чтобы он весь находился в кадре. Коэффициенты коррекции хроматической аберрации определяют по смещению цветовых каналов изображения в калибровочных точках изображения. В качестве калибровочных точек выбирают точки, расположенные на пересечении контура калибровочного объекта и перпендикулярной ему прямой, проходящей через центр изображения (фиг.4). Число калибровочных точек объекта определяет максимальное число коэффициентов коррекции хроматической аберрации, которые могут быть рассчитаны по этим точкам. Точность коррекции хроматической аберрации определяется числом коэффициентов коррекции. Для практического применения достаточно определять 3 коэффициента для R и В цветовых каналов изображения. Точность коррекции хроматической аберрации может быть повышена путем определения дополнительных коэффициентов коррекции. Для этого калибровочный объект выбирают таким образом, чтобы увеличить число калибровочных точек. Блок-схема алгоритма определения коэффициентов коррекции хроматической аберрации представлена на фиг.3. В блоке 1 (фиг.3) производится ввод изображения калибровочного объекта (фиг.2). Изображение представляет собой матрицу значений яркостей пикселей I=I(x,y), 0 x где x, y – координаты пикселя изображения по горизонтали и вертикали, соответственно, w, h – размерность изображения по горизонтали и вертикали, соответственно. В блоке 2 (фиг.3) производится выделение контуров калибровочного объекта [Методы компьютерной обработки изображений / Под. Ред. В.А.Сойфера. – М.: Физматлит, 2001] и бинаризация по формуле
g(x,y)=|I(x+1,y)+I(x-1,y)+I(x,y+1)+I(x,y-1)-4·I(x,y)|,
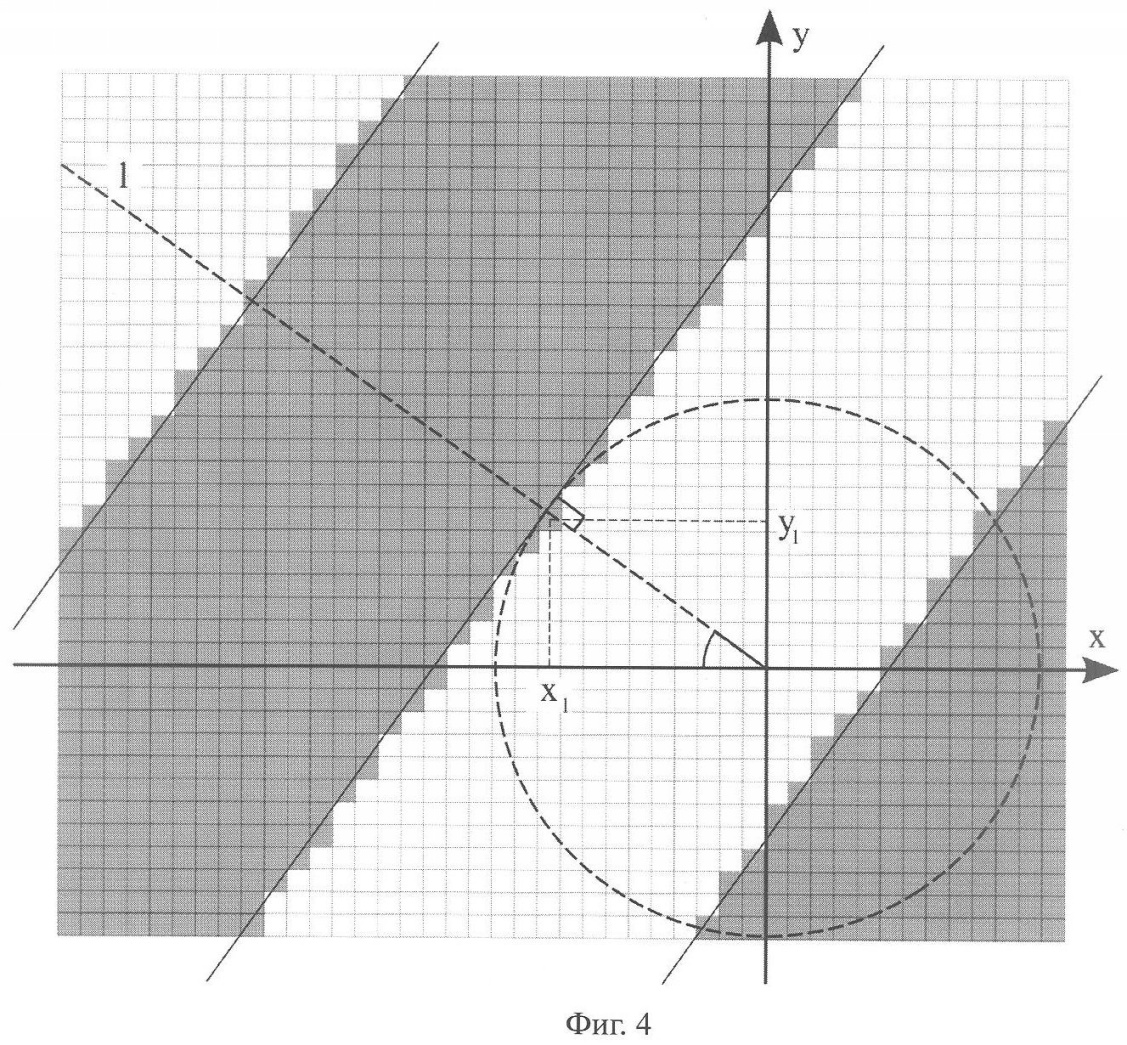
где g(x, y) – контурное изображение, определяемое множеством значений яркостей в точках с координатами (x, y), Т – пороговое значение изменения яркости, по которому определяется принадлежность точки изображения фону или контуру, gmin – параметр, определяющий минимальное изменение яркости и задаваемый для всего изображения. После выделения контуров производится определение координат калибровочных точек калибровочного объекта. В качестве калибровочных точек выбираются точки, расположенные на пересечении контура калибровочного объекта и перпендикулярной ему прямой l, проходящей через центр изображения (фиг.4). В блоке 3 (фиг.3) производится определение координат калибровочной точки, ближайшей к центру изображения (фиг.4), по условию
x где x1, y1 – координаты первой калибровочной точки, b(x, y) – значение контурного изображения в точке с координатами (x, y). В блоке 4 (фиг.3) производится определение координат следующей калибровочной точки (фиг.5). Вычисляют угол наклона
где xn, yn – координаты калибровочной точки. После чего определяются координаты следующей калибровочной точки, расположенной на пересечении контура калибровочного объекта и прямой l, по условию yn=tg( где xn, yn – координаты калибровочной точки, xn-1, yn-1 – координаты предыдущей калибровочной точки. Затем полученные координаты уточняются (фиг.5) по условию
где x’n, y’n – уточненные координаты калибровочной точки, b(x, y) – значение контурного изображения в точке с координатами (x, y). Если точка определена, производится переход в блок 4 (фиг.3) и уточнение угла В блоке 5 (фиг.3) производится определение максимальных значений яркости R и В цветовых каналов изображения IR(max)=max(IR(x, y)), IB(max)=max(IB(x, y)), где IR(х, y), IB(х, y) – значение яркости R и В цветовых каналов изображения в точке с координатами (х, y). В окрестностях калибровочной точки радиальное расстояние определяется линейной зависимостью согласно формуле r’R(n)=kR(n)·rn, r’B(n)=kB(n)·rn, где kR(n), kB(n) – линейные коэффициенты коррекции хроматической аберрации R и В цветовых каналов изображения, rn – радиальное расстояние до точки изображения, r’R(n), r’B(n) – радиальные расстояния до истинных положений калибровочных точек R и В цветовых каналов изображения. В блоке 6 (фиг.3) производится определение линейных коэффициентов коррекции хроматической аберрации в калибровочных точках изображения. В калибровочных точках изображения при отсутствии хроматической аберрации значение яркости максимально, однако, при наличии хроматической аберрации происходит смещение R и В цветовых каналов изображения относительно G канала. Смещение цветовых каналов изображения описывается формулой
Таким образом коэффициенты kR(n), kB(n) определяются решением уравнения I’R(xR(n)·kR(n), yR(n)·kR(n))=IR(max), I’B(xB(n)·kB(n), yB(n)·kB(n))=IB(max), где I’R(хR(n)·kR(n), yR(n)·kR(n)), I’B(хB(n)·kB(n), yB(n)·kB(n)) – значение яркости R и В цветовых каналов изображения точках с координатами (хR(n)·kR(n), yR(n)·kR(n)), (хB(n)·kB(n), yB(n)·kB(n)), определенные по значениям смежных точек с помощью метода билинейной интерполяции, IR(max), IB(max) – максимальные значения яркости R и В цветовых каналов изображения. Затем производится переход в блок 6 (фиг.3) и расчет линейного коэффициента хроматической аберрации в окрестностях следующей калибровочной точки. В блоке 7 (фиг.3) осуществляется расчет коэффициентов хроматической аберрации решением систем уравнений
где r1, r2, Блок-схема алгоритма коррекции хроматической аберрации представлена на фиг.6. В блоке 1 (фиг.6) производится ввод изображения. Изображение представляет собой матрицу значений яркостей пикселей I=I(x,y), 0 x где x, y – координаты пикселя изображения по горизонтали и вертикали, соответственно, w, h – размерность изображения по горизонтали и вертикали, соответственно. В блоке 2 (фиг.6) производится определение истинных положений точек R и В цветовых каналов изображения по формуле
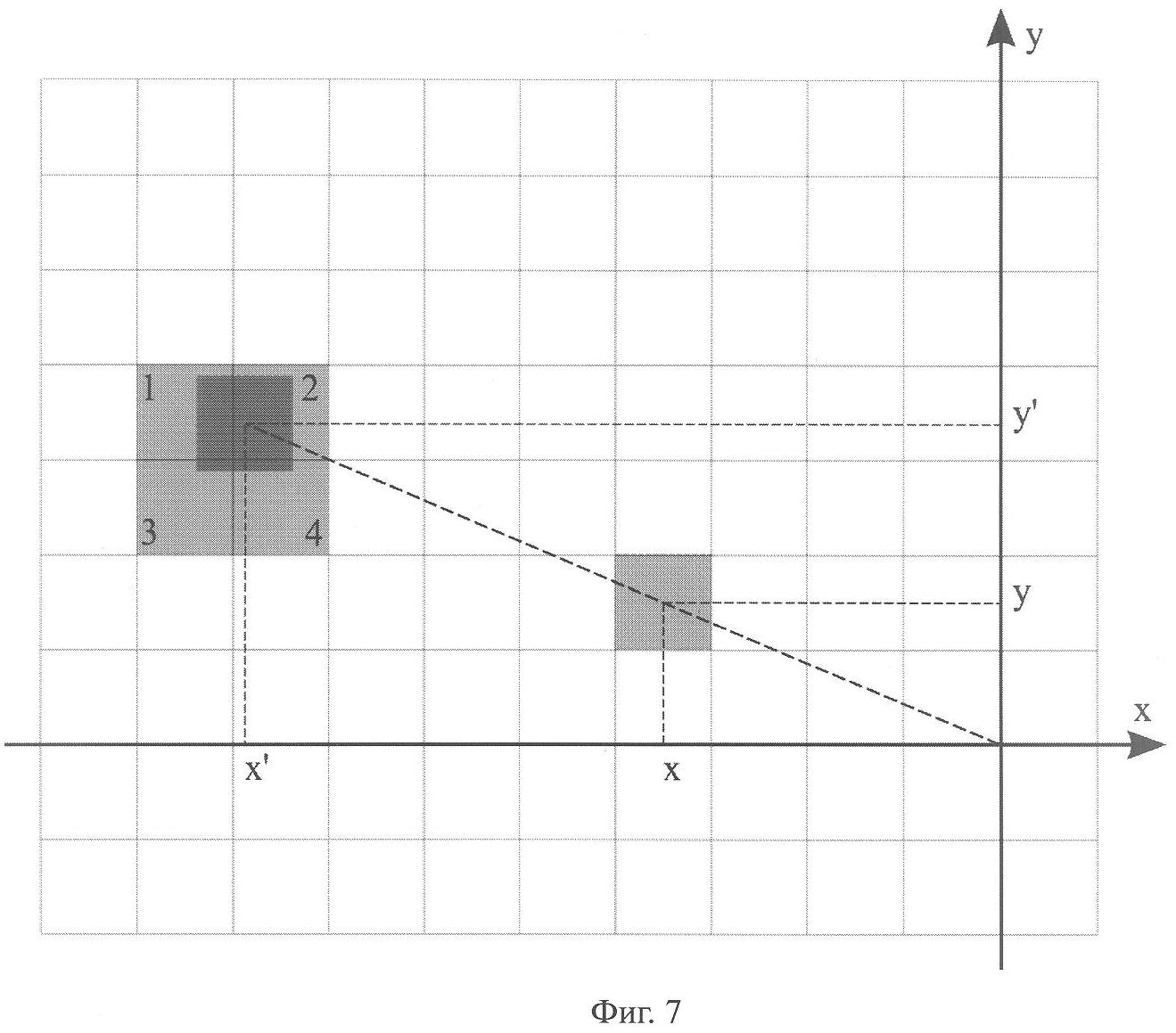
В блоке 3 (фиг.6) производится определение значений яркости, соответствующих истинным положениям точек R и В цветовых каналов изображения. Искомые значения яркости не могут быть явно определены по матрице значений яркостей точек изображения, так как истинные положения точек определяются вещественными координатами. Точка дискретного изображения представляет собой квадратную область с единичной площадью и определенным значением яркости, центр которой определяется дискретными координатами. Точка с вещественными координатами может быть представлена как квадратная область с единичной площадью, пересекающая соседние области с дискретными координатами. Значение в этой области определяется по значением соседних областей пропорционально площади пересечения методом билинейной интерполяции по формуле (фиг.7) I’R(x’R,y’R)=(1-tR)(1-uR)·IR(x’R(1),y’R(1))+tR(1-uR)·IR(x’R(3),y’R(3))+ +tR·uR·IR(x’R(4),y’R(4))+uR·(1-tR)·IR(x’R(2),y’R(2)), uR=(x’R(1)-x’R)/(x’R(1)-x’R(2)), tR=(y’R(1)-y’R)/(y’R(1)-y’R(3)), I’B(x’B,y’B)=(1-tB)(1-uB)·IB(x’B(1),y’B(1))+tB(1-uB)·IB(x’B(3),y’B(3))+ +tB·uB·IB(x’B(4),y’B(4))+uB·(1-tB)·IB(x’B(2),y’B(2)), uB=(x’B(1)-x’B)/(x’B(1)-x’B(2)), tB=(y’B(1)-y’B)/(y’B(1)-y’B(3)), где x’R, y’R, x’B, y’B – координаты истинных положений точек R и В цветовых каналов изображения, (x’R(1), y’R(1)), (x’R(2), y’R(2)), (x’R(3), y’R(3)), (x’R(4), y’R(4)), (x’B(1), y’B(1)), (x’B(2), y’B(2)), (x’B(3), y’B(3)), (x’B(4), y’B(4)) – координаты смежных точек. В блоке 4 (фиг.6) производится замена значений яркости R и В каналов в исходной точке изображения на соответствующие рассчитанные значения IR(x,y)=I’R(x’R,y’R), IB(x,y)=I’B(x’B,y’B), где I’R(x’R, y’R), I’B(x’B,y’B) – рассчитанные значения яркости R и В цветовых каналов изображения. Производится выбор следующей точки изображения и переход в блок 3 (фиг.6). Разработанный способ позволяет повысить точность коррекции хроматической аберрации оптической подсистемы системы технического зрения за счет определения значений яркости в истинных положениях точек цветовых каналов изображения по значениям смежных точек.
Формула изобретения
Способ коррекции хроматической аберрации оптической подсистемы системы технического зрения, включающий ввод изображения в ЭВМ, определение истинных положений точек R и В цветовых каналов изображения по формуле
РИСУНКИ
|
||||||||||||||||||||||||||


 , сB(n), cR(1), cR(2),
, сB(n), cR(1), cR(2), 
 ,
,  ,
, 
 ,
,  ,
, 
 ,
, I(x,y)
I(x,y) 1,
1, [-w/2; w/2], y
[-w/2; w/2], y
 ,
, ,
,
 , xn+
, xn+ прямой l по формуле
прямой l по формуле





 ,
,  ,
, 
 ,
, 
 .
.