Патент на изобретение №2352316
|
||||||||||||||||||||||||||
(54) УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ ФУНКЦИИ НИЖНИХ КОНЕЧНОСТЕЙ
(57) Реферат:
Изобретение относится к медицинской технике. Данное устройство содержит основание с направляющими, каретки с приспособлениями для фиксации конечностей, соединенные через тяги с электроприводами, двигатели которых подключены к системе управления. Основание снабжено дополнительными двигателями, на валах которых через рычаг закреплены подколенные валики. Двигатели электроприводов снабжены датчиками положения кареток, каждая из кареток снабжена двумя стойками, в верхней части которых закреплены шарниры, соединенные через кронштейны с упорами для стоп. На основании между направляющими установлены ограничители, а на смежных с ними кронштейнах жестко закреплены рычаги, установленные с возможностью взаимодействия с ограничителями. Система управления включает микропроцессорный блок, усилитель мощности, блок сопряжения, компьютер. При этом микропроцессор своими выходами через усилитель подключен ко входам электродвигателей, и через блок сопряжения к компьютеру, выходы датчиков положения кареток подключены ко входам микропроцессора. Применение данного устройства позволяет сократить сроки реабилитации, восстановить в более полном объеме функции нижних конечностей. 2 ил.
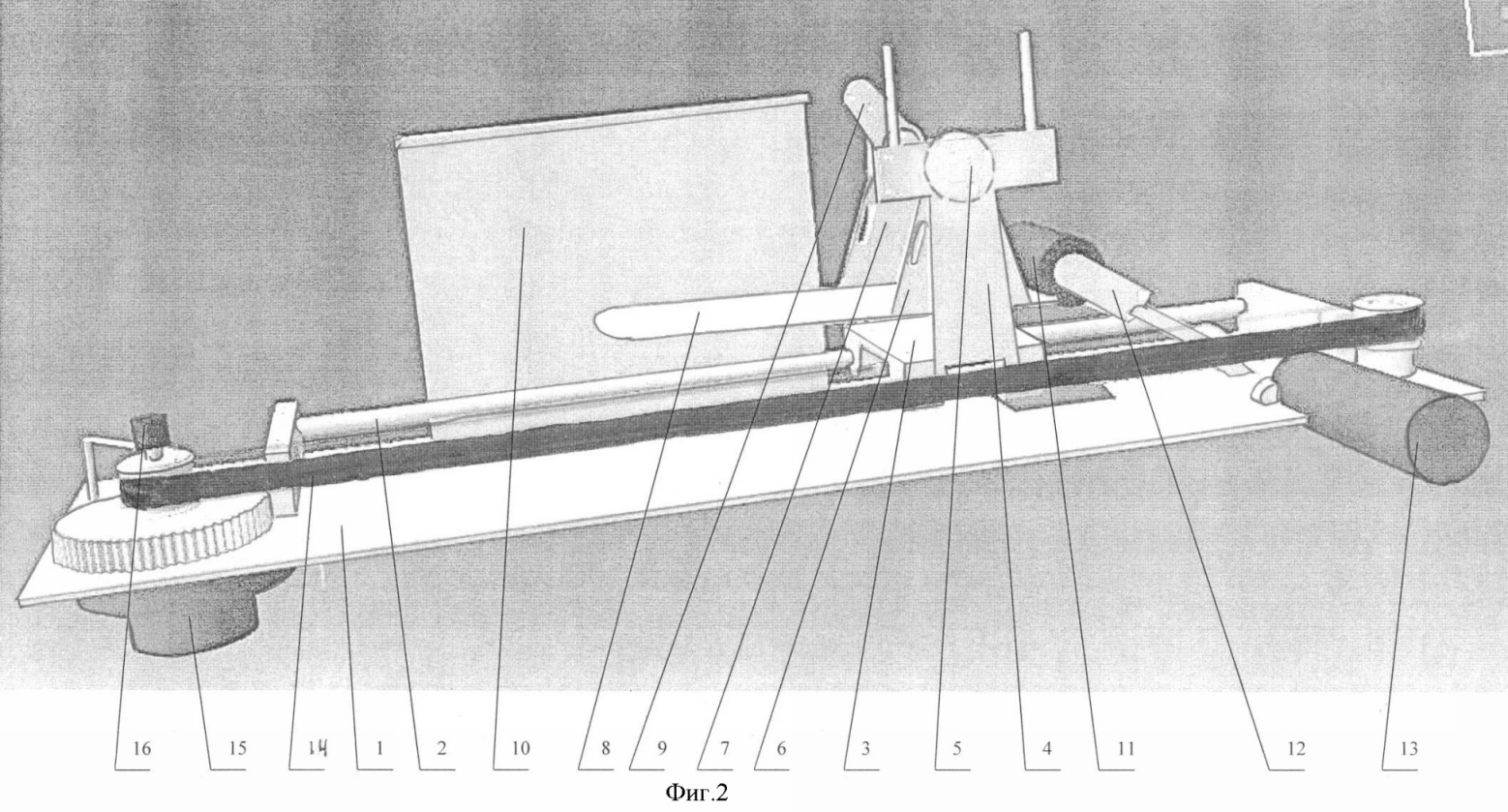
Изобретение относится к медицинской технике, а именно к устройствам для пассивной гимнастики. Известно устройство для разработки нижних конечностей (Патент РФ Недостатком этого устройства является то, что оно предусматривает разработку суставов одномоментно одной конечности в активном режиме, что сложно применять, например, при парезах верхних конечностей, требует от пациента значительных усилий. Не создается режим, соответствующий нормальной ходьбе. Предусмотрена жесткая фиксация стопы, что не позволяет ее разрабатывать. Известно устройство для разработки суставов нижних конечностей (Авт. свид. СССР Недостатком этого устройства является то, что разрабатывается только один сустав, при этом положение остальных суставов ноги фиксировано, что не позволяет воссоздать движения, близкие к ходьбе. Наиболее близким является устройство для восстановления функции суставов механотерапией (Патент РФ К недостаткам этого устройства можно отнести сложность индивидуализации и задания разных режимов проведения механотерапии, поскольку механическое воздействие на конечности при пассивной нагрузке осуществляется только в одном суставе, кроме того, система управления не задает движение конечности, близкое к нормальной ходьбе здорового человека. Задачей предлагаемого изобретения является устранение указанных недостатков за счет обеспечения движений суставов, амплитуда и скорость которых соответствует параметрам нормальной ходьбы, при этом воспроизводится координация движения обеих ног. Это позволяет воссоздать приток афферентной информации в центральную нервную систему, что, в свою очередь, способствует более полной и быстрой реабилитации. Ноги пациента управляются согласно предварительно запрограммированным образцам физиологической походки. Положительный эффект будет выражен сильнее, если процедуры начинают как можно раньше вслед за событием, приведшим к двигательной дисфункции (травма, инсульт и т.п.). Для достижения поставленной задачи в устройстве для восстановления функции нижних конечностей, содержащем основание с направляющими, каретки с приспособлениями для фиксации конечностей, соединенные через тяги с электроприводами, двигатели которых подключены к системе управления, предложено основание снабдить дополнительными двигателями. При этом на валах этих двигателей через рычаг закреплены подколенные валики. Двигатели электроприводов снабжены датчиками положения кареток, а каждая из кареток снабжена двумя стойками, в верхней части которых закреплены шарниры, соединенные через кронштейны с упорами для стоп. На основании между направляющими установлены ограничители, а на смежных с ними кронштейнах жестко закреплены рычаги, установленные с возможностью взаимодействия с ограничителями. Система управления включает микропроцессорный блок, усилитель мощности, блок сопряжения, компьютер, при этом микропроцессор своими выходами через усилитель подключен ко входам электродвигателей и через блок сопряжения к компьютеру, выходы датчиков положения кареток подключены ко входам микропроцессора. На фиг.1 представлена схема системы управления устройством; на фиг.2 – общий вид левой части устройства (правая – симметрична). Предлагаемое устройство состоит из основания 1, на котором закреплены направляющие 2 с установленными на них подвижными каретками 3. На каждой каретке установлены по две стойки 4, в верхней части которых закреплены шарниры 5, соединенные через кронштейны 6 и 7 с упорами для стоп 8. На кронштейне 7 жестко закреплен рычаг 9. На основании 1 между направляющими 2 установлены ограничители 10, взаимодействующие с рычагом 9. В месте расположения коленного сустава располагается подвижный валик 11, соединенный с помощью рычага 12 с валом двигателя 13. Каретки 3 приводятся в движение посредством тяги, например, зубчатых ремней 14, двигателями 15, закрепленными на основании 1. На осях двигателей 15 закреплены датчики 16 положения подвижных кареток. Система управления устройством включает микропроцессорный блок 17, 4-канальный усилитель мощности 18, блок сопряжения 19, компьютер 20. При этом микропроцессор своими выходами через усилитель 18 подключен ко входам электродвигателей 13 и 15, а через блок сопряжения 19 он подключен к компьютеру 20, выходы датчиков положения кареток 16 подключены ко входам микропроцессорного блока 17. Для повышения эффективности двигательной реабилитации пациента можно использовать мионейростимятор 21, который подключают к блоку сопряжения 19. Работа устройства осуществляется следующим образом. Устройство может быть установлено на обычную больничную кровать. Желательно пользоваться функциональной кроватью, позволяющей наклонить плоскость, на которой лежит пациент, относительно горизонта. К кареткам 3 на упорах 8 закрепляются стопы пациента. При разгибании ноги рычаг 9 приходит в соприкосновение с ограничителем 10. Далее рычаг 9, двигаясь вдоль ограничителя 10, заставляет стопу поворачиваться в тыльном направлении. При сгибании ноги рычаг 9 теряет контакт с ограничителем 10, вследствие этого стопа совершает подошвенное сгибание под действием силы тяжести. Программа движения кареток 3 (программная траектория) сформирована на основании записи движений ног здорового человека при ходьбе на месте. В исходном положении ноги пациента выпрямлены. В начале движения ноги двигатель 13 сгибает ногу в коленном суставе с помощью валика 11, дальнейшее сгибание ноги осуществляется за счет перемещения кареток 3 двигателем 15, при этом валик 11 возвращается в исходное положение. Система управления за счет введения в нее микропроцессорного блока 17 и компьютера 20 позволяет создать различные режимы проведения реабилитационных процедур: – режим «искусственной податливости», при котором двигатель 15 не препятствует свободному движению каретки 3; – попеременного сгибания-разгибания правой и левой ноги за счет двигателей; – циклического движения паретичной ноги за счет двигателей при полном «отключении» двигателя здоровой ноги с помощью «искусственной податливости»; – режим, аналогичный предыдущему, с тем отличием, что цикл движения паретичной ноги запускается от движения здоровой; – режим, при котором привод помогает естественному движению ноги, не ограничивая «свободы» пациента. При назначении врача дополнительно с механотерапией проводят мионейростимуляцию, при этом стимуляционные электроды от мионейростимулятора 21 накладываются накожно на мышцы пациента, подлежащие стимуляции. В соответствии с заданными фазами движения включается и выключается стимуляция по заданным каналам. Предлагаемое устройство позволяет инвалидизацию данной категории больных, сократить сроки реабилитации, восстановить в более полном объеме функции нижних конечностей. Кроме того, предлагаемое устройство не представляет труда в обслуживании и эксплуатации и поэтому может быть использовано на базе любого стационара и при амбулаторном лечении. Компьютерное управление позволяет проводить индивидуальную коррекцию различных параметров походки.
Формула изобретения
Устройство для восстановления функции нижних конечностей, содержащее основание с направляющими, каретки с приспособлениями для фиксации конечностей, соединенные через тяги с электроприводами, двигатели которых подключены к системе управления, отличающееся тем, что основание снабжено дополнительными двигателями, на валах которых через рычаг закреплены подколенные валики, двигатели электроприводов снабжены датчиками положения кареток, каждая из кареток снабжена двумя стойками, в верхней части которых закреплены шарниры, соединенные через кронштейны с упорами для стоп, на основании между направляющими установлены ограничители, а на смежных с ними кронштейнах жестко закреплены рычаги, установленные в возможностью взаимодействия с ограничителями, система управления включает микропроцессорный блок, усилитель мощности, блок сопряжения, компьютер, при этом микропроцессор своими выходами через усилитель подключен ко входам электродвигателей, и через блок сопряжения к компьютеру, выходы датчиков положения кареток подключены ко входам микропроцессора.
РИСУНКИ
|
||||||||||||||||||||||||||
 2085173, МПК А61Н 1/02, публ. 1997 г.), содержащее направляющую, на которой установлены ролики, снабженные ребордами и поставленные на направляющие с возможностью качения по ним, подстопник и ложемент для голени, П-образную тягу.
2085173, МПК А61Н 1/02, публ. 1997 г.), содержащее направляющую, на которой установлены ролики, снабженные ребордами и поставленные на направляющие с возможностью качения по ним, подстопник и ложемент для голени, П-образную тягу.