Патент на изобретение №2352033
|
||||||||||||||||||||||||||||||||||||||||||
(54) ГИБРИДНАЯ ЗЕРКАЛЬНАЯ АНТЕННА С РАСШИРЕННЫМИ УГЛАМИ СЕКТОРНОГО СКАНИРОВАНИЯ
(57) Реферат:
Использование: для космических и наземных станций контроля воздушного пространства. Технический результат заключается в повышении скорости сканирования при уменьшении размеров активной фазированной антенной решетки. В гибридной зеркальной антенне (ГЗА) используется двойное управление лучом: электронное и механическое. Электронное сканирование в ГЗА осуществляется коммутационным способом с изменением амплитуды и фазы. С помощью механического сканирования достигается периодическое перемещение области электронного сканирования. 2 з.п. ф-лы, 7 ил., 2 табл.
Изобретение – гибридная зеркальная антенна (ГЗА) с расширенными углами секторного сканирования в азимутальной плоскости – относится к антенной технике и может быть применено на космических станциях для контроля воздушного пространства. В работе [1] изобретение предназначено для использования в системах пеленгации и сопровождения и позволяет уменьшить изменение уровня пересечения диаграммы направленности (ДНА) в равносигнальном направлении в широком диапазоне частот. Для этого в зеркальной антенне, содержащей отражатель в виде вырезки из параболоида вращения и многоэлементный облучатель, который выполнен в виде 4-элементной гексагональной решетки из открытых концов Н-волноводов, гребни Н-волноводов продолжены за плоскость их раскрыва в виде выступов, расстояние между которыми плавно увеличивается до 0,25-0,45 В работе [2] предложен алгоритм синтеза гибридной зеркальной антенны с профилированным рефлектором, поверхность которого формируется с помощью численных оптимизационных процедур; рассмотрен пример антенны с линейной облучающей решеткой, предназначенной для сканирования в одной плоскости в ограниченном секторе углов. В патенте [3] рассмотрена развертываемая зеркальная антенна, устанавливаемая на поверхности космического корабля. Антенна имеет параболическое зеркало с рупорным облучателем и механическую часть с двумя двигателями постоянного тока. Механическая часть состоит из опорно-поворотных колец, двух параллельных направляющих, механизма скольжения, угломестного механизма и механизма крепления облучателя. Вращающееся кольцо определяет положение антенны по азимуту и приводится в движение с помощью двигателя, связанного с ним через червячный механизм. Механизм скольжения, на котором закреплен угломестный механизм, связанный с зеркалом, перемещается вдоль направляющих с помощью привода от двигателя. Механическая часть обеспечивает быстрое и прецизионное развертывание антенны при минимальном уровне интерференции волн от ее выступающих частей. Прототипом предлагаемой антенны можно считать ГЗА, предлагаемую в работе [4]. В статье изложена теория и расчет антенны диаметром 35,5 м с углом сканирования, до 200 раз превышающих ширину диаграммы направленности. Система работает в Ка-диапазоне на частоте 35,6 ГГц, имеет ширину луча 0,02° и используется для определения ураганов центров кругового движения облаков верхнего уровня с космического аппарата, дает возможность трехмерного анализа критических параметров и динамики, контроля их образования и эволюции. ГЗА состоит из сферического рефлектора радиусом 56 м и подвижного облучателя (движение по спирали) в виде планарной фазированной антенной решетки. Фазированная антенная решетка имеет 271 элемент, расположенный в узлах гексагональной сетки с шагом 0,9 Недостатком конструкций рассмотренных антенн с механическим приводом является их низкая скорость сканирования. В этих антеннах, тем не менее, обеспечивается широкая зона облучения. В ГЗА с электронным сканированием при расширении сектора сканирования увеличиваются размеры активной фазированной антенной решетки (АФАР). Техническим результатом, который достигается с помощью заявляемого изобретения, является преодоление присущих прототипу недостатков, а именно повышение скорости сканирования при уменьшении размеров АФАР. Для достижения заявляемого технического результата предлагается в известной ГЗА использовать двойное управление лучом: электронное и механическое. На фиг.1 приведена блок-схема ГЗА с двойным управлением луча, выполненная по предлагаемому изобретению. ГЗА с расширенными углами секторного сканирования в азимутальной плоскости включает в себя рефлектор (Р) 1, облучатель 2 в виде АФАР, помещенный во вне фокальной плоскости, приемопередающие модули (ППМ1-ППМn) 3 с фазовращателями и аттенюаторами в каналах передачи и приема, СВЧ-распределительную систему (PC) 4, которая получает СВЧ-энергию от возбудителя (ВЗ) 5, источники питания модулей (ИП1-ИПn) 6, процессор АФАР (ПА) 7, задающий амплитудное и фазовое распределение в ППМ1-ППМn по кластеру излучения АФАР, и отличается от прототипа [4] тем, что в ГЗА дополнительно введен механизм изменения положения рефлектора (МПР) 8, блок коррекции координат кластера излучения (БК) 9, введенный в процессор АФАР (ПА). В предлагаемой конструкции ГЗА МПР может быть выполнен в виде механизма вращения рефлектора, оптическая ось (OO) которого не совпадает с осью его вращения (ОВ), или в виде механизма качания рефлектора в азимутальной плоскости. Предложенная конструкция ГЗА работает следующим образом. Электронное сканирование по азимуту и углу места обеспечивает обзор в пределах заданного числа (например, 30 на 20) ширин диаграмм направленности (ШДН) и осуществляется коммутационным способом с изменением амплитуды и фазы. Суть этого способа состоит в следующем. Каждое положение луча ГЗА соответствует включению определенного набора ППМ АФАР (кластера излучения) с соответствующими значениями амплитуды и фазы, устанавливаемыми аттенюаторами и фазовращателями. Перемещение луча обеспечивается изменением положения кластера и установкой новых значений амплитуды и фазы в ППМ. Управление коммутацией, амплитудой и фазой ППМ производится по кодам процессора. Дополнительное сканирование (от минус 30 до 30 ШДН) достигается изменением положения рефлектора путем его вращения вокруг оси (ОВ), нормальной к плоскости АФАР и не совпадающей с оптической осью (ОО) рефлектора, или качанием рефлектора в азимутальной плоскости. МПР изменяет положение рефлектора и управляется процессором (ПА). БК, введенный в процессор АФАР, осуществляет коррекцию таблицы координат кластеров излучения, загруженной в процессор, в зависимости от положения рефлектора. Коррекция происходит для текущего положения МПР по соотношениям (13), (14) при вращении и качании соответственно. На фиг.2 приведены графики амплитудного распределения поля по АФАР в зависимости от отклонения луча, полученные путем математического моделирования. Кривая 10 соответствует неотклоненному лучу, кривая 11 – отклонению 30 ШДН, кривая 12 – отклонению 60 ШДН. Форма распределения будет близка к прямоугольной (Френелевской) при отклонении луча до 8 ШДН. Наибольшие искажения, вызванные каустикой, будут при выносе пятна АФАР более 20 ШДН. Для уменьшения влияния искажений необходимо увеличивать размер АФАР. Большие размеры АФАР, с одной стороны, приводят к увеличению массы антенны и затенению рефлектора, с другой стороны, позволяют не концентрировать мощность в одном или небольшом количестве ППМ. Отношение фокусного расстояния к диаметру зеркала выбирается таким образом, чтобы обеспечить минимальные размеры АФАР. При неподвижном рефлекторе за один цикл луч занимает в пределах сканирования Nx положений по азимуту и Ny положений по углу места. При этом время пребывания луча в каждом из фиксированных положений составляет
где Nx – число положений луча по азимуту; Ny – число положений луча по углу места; Т – время обзора. Временная зависимость положения луча по азимуту за время одного цикла обзора представлена на фиг.3 и определяется выражениями
где
i – номер положения луча по азимуту;
где floor { Nx – число положений луча по азимуту;
t – время. Временная зависимость положения луча по углу места за один цикл обзора представлена на фиг.4 и определяется выражениями
где
j – номер положения луча по углу места.
где floor { Ny – число положений луча по углу места;
t – время. Приведенные на фиг.4 буквенные обозначения положений лучей соответствуют таблице 1.
Расчетные положения центра кластера распределения поля по АФАР выражаются как Хi=-F·tg(Ai) и Yj=-F·tg(Bj) (6) где F – фокусное расстояние рефлектора; Аi – положение луча по азимуту; Bj – положение луча по углу места; В предлагаемом варианте построения ГЗА с подвижным рефлектором при обзоре по азимуту луч перемещается в двух направлениях – половину цикла (лучи i=1÷Nx
где
i – номер положения луча по азимуту, Nx
floor{ Nx
t – время. Приведенные на фиг.5 буквенные обозначения участков кривой соответствуют положениям лучей: участок Аi1 Временная зависимость положения луча по углу места варианта с движущимся рефлектором представлена на фиг.6 и определяется выражениями,
j – номер положения луча по углу места;
floor{ N
t – время. Приведенные на фиг.6 буквенные обозначения положений лучей соответствуют таблице 2.
Текущие смещения луча по азимуту и углу места, вызванные перемещением рефлектора антенны в случае его вращения вокруг оси, нормальной к плоскости, и при котором оптическая ось рефлектора повернута на угол относительно оси вращения, соответственно равны: Aiв=-Rcos{
где R – угол отклонения луча;
t – время, в случае качания рефлектора в азимутальной плоскости, характеризуется выражением
где Aiк – текущее смещение луча по азимуту, вызванное качанием рефлектора антенны; Аmax – максимальное отклонение луча, вызванное качанием рефлектора; V – скорость качания; T – время обзора; t – время. Расчетные положения центра кластера распределения поля по АФАР в случае вращения рефлектора определяются выражениями: Xiв=-Ftg(Ai+Rcos(
в случае качания рефлектора определяются выражениям Xiк=-Ftg(Ai-Aiк)
где F – фокусное расстояние рефлектора; Аi – положение луча по азимуту для антенны с подвижным рефлектором; Вi – положение луча по углу места для антенны с подвижным рефлектором; R – угол отклонения луча;
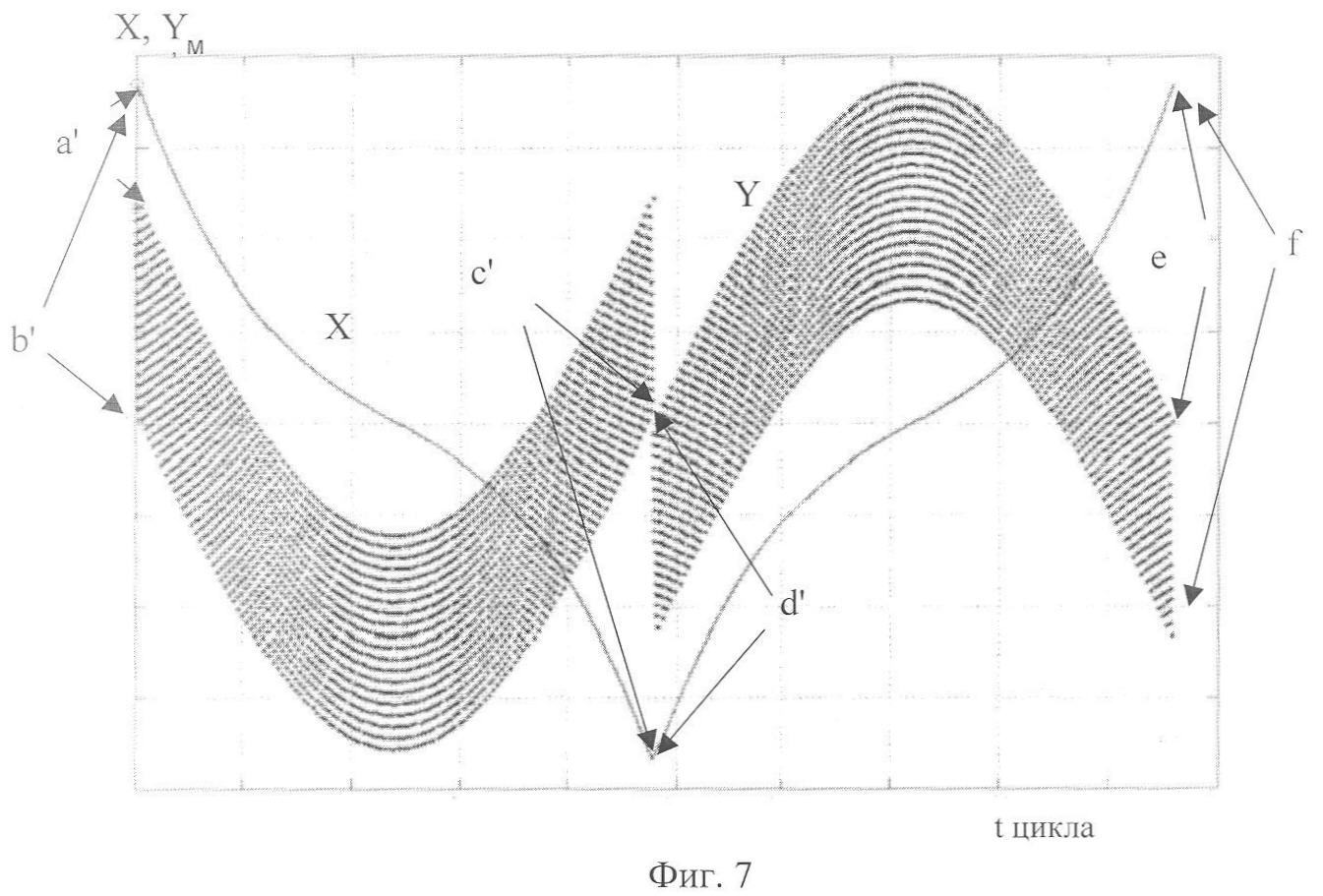
t – время; Приведенные на фиг.5 и 6 положения лучей формируются в результате суммарного действия механического перемещения рефлектора и электронного смещения кластера по площади АФАР-облучателя. Соответственно электронное сканирование должно отрабатывать разность заданных значений углов и смещения луча, вызванные вращением или качанием рефлектора. На фиг.7 представлены временные зависимости центров кластеров на АФАР за цикл обзора для формирования требуемой геометрии сканирования. Точки а Требуемая для предложенного варианта ГЗА площадь АФАР-облучателя значительно меньше, чем требуется для варианта с неподвижным рефлектором: S~Xmax Ymax, Sв~Xвmax Yвmax Sк~Xкmax Yкmax
где Хmax, Ymax, Хвmax, Yвmax, Хкmax, Yкmax – максимальные отклонения кластера на АФАР во взаимно перпендикулярных направлениях для неподвижного, вращающегося и качающегося рефлектора соответственно; S, Sв, Sк – площади АФАР в случае неподвижного, вращающегося, качающегося рефлектора соответственно. Список литературы: 1. Бобков Н.И., Бочарников А.А., Кашубин Б.Т., Логвиненко Е.Л., Савеленко А.А., Стуров А.Г., Яшин Н.П. Широкополосная четырехлучевая зеркальная антенна (варианты). Пат. 2. Реутов А.С., Шишлов А.В. Конструктивный синтез и оценки эффективности гибридных зеркальных антенн с профилированными рефлекторами антенны. 2005, N 1, с.63-67. 3. Sherwood William J., Rodeffer Charles E., Rodeffer Mark A. Развертываемая антенна для космических кораблей. Deployable satellite antenna for use on vehicles. Пат. 5528250 США, H01Q 1/32. 4. Keyvan Badahory, Yahya Rahmat-Samii. An Array-Compensated Spherical Reflector Antenna for a Very Large Number of Scanned Beams. IEEE Trans, on AES, vol 53, No 11, November 2005, p.3547-3555
Формула изобретения
1. Гибридная зеркальная антенна (ГЗА) с расширенными углами секторного сканирования в азимутальной плоскости, включающая рефлектор, облучатель в виде активной фазированной антенной решетки (АФАР), помещенной во вне фокальной плоскости, приемопередающие модули (ППМ) с фазовращателями и аттенюаторами в каналах передачи и приема, СВЧ-распределительную систему (PC), возбудитель (ВЗ), источники питания (ИП) модулей, а также процессор АФАР, задающий амплитудное и фазовое распределения в ППМ по кластеру излучения АФАР, отличающаяся тем, что в ГЗА дополнительно введен механизм изменения положения рефлектора (МИР), а в процессор АФАР введен блок коррекции координат кластера излучения в зависимости от положения рефлектора. 2. ГЗА по п.1, отличающаяся тем, что механизм изменения положения рефлектора выполнен в виде механизма вращения рефлектора, причем оптическая ось рефлектора не совпадает с осью его вращения. 3. ГЗА по п.1, отличающаяся тем, что механизм изменения положения рефлектора выполнен в виде механизма качания рефлектора в азимутальной плоскости.
РИСУНКИ
|
||||||||||||||||||||||||||||||||||||||||||
 .
.

 А – шаг сканирования по азимуту;
А – шаг сканирования по азимуту; А – предел сканирования по азимуту;
А – предел сканирования по азимуту;
 } – целая часть дроби;
} – целая часть дроби;

 /2) – направо и вторую половину цикла (лучи i=Nx
/2) – направо и вторую половину цикла (лучи i=Nx



 t);
t);


 ,
,
 2099836, Россия, H01Q 19/17.
2099836, Россия, H01Q 19/17.