Патент на изобретение №2342746
|
||||||||||||||||||||||||||
(54) СПОСОБ ПОДЛЕДНОГО ПРИЕМА СИГНАЛОВ СПУТНИКОВЫХ НАВИГАЦИОННЫХ СИСТЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ НА ГОРИЗОНТЕ ПЛАВАНИЯ
(57) Реферат:
Изобретение относится к области радиотехники, а именно для использования спутниковых навигационных систем (СНС), и может быть применен для коррекции инерциальной навигационной системы (ИНС) подводного объекта при нахождении в Северном Ледовитом океане (СЛО) подо льдом на горизонте плавания. Техническим результатом является расширение функциональных возможностей путем обеспечения определения с требуемой точностью поправки к истинному курсу, вырабатываемого бортовой ИНС подводного объекта при нахождении его на горизонте плавания. Технический результат достигается тем, что при помощи первого и второго спускоподъемного устройств доставляют до нижней кромки льда в места А и С первую и вторую положительные плавучести, внутри которых установлены соответственно первая и вторая антенны, первый и второй приемники СНС, первый и второй механизмы ввода антенн в лед, первую и вторую малогабаритные ИНС, первый и второй измерители времени, первый и второй блоки управления и первый и второй регистраторы. После внедрения первой и второй антенн в лед в места А и С их приледнения к нижней кромке льда и приема ими сигналов космических аппаратов (КА), измеряют параметры этих сигналов, и определяют по значениям данных параметров обсервованные геодезические координаты мест А и С, при этом фиксируют время приема антеннами сигналов КА. Повторяют все вышеописанные операции в местах В и Д второго приледнения к нижней кромке льда и вновь фиксируют время приема антеннами сигналов КА, а также время начала повторной доставки положительных плавучестей от места расположения первого и второго спускоподъемного устройства до нижней кромки льда. Затем определяют последовательно счислимые геодезические координаты первой и второй малогабаритной ИНС с привязкой их по времени в течение периода, характеризующегося временем, прошедшим от первого внедрения первой и второй антенн в лед, и повторным их внедрением в лед, в местах их повторного приледнения к нижней кромке льда. По полученным данным определяют расчетным путем обсервованные геодезические координаты мест расположения на подводном объекте соответственно первого и второго спускоподъемного устройства по информации, полученной в один и тот же момент времени, а по ним определяют вычислительным путем поправку к истинному курсу подводного объекта, выработанного бортовой ИНС. 2 н.п. ф-лы, 2 ил.
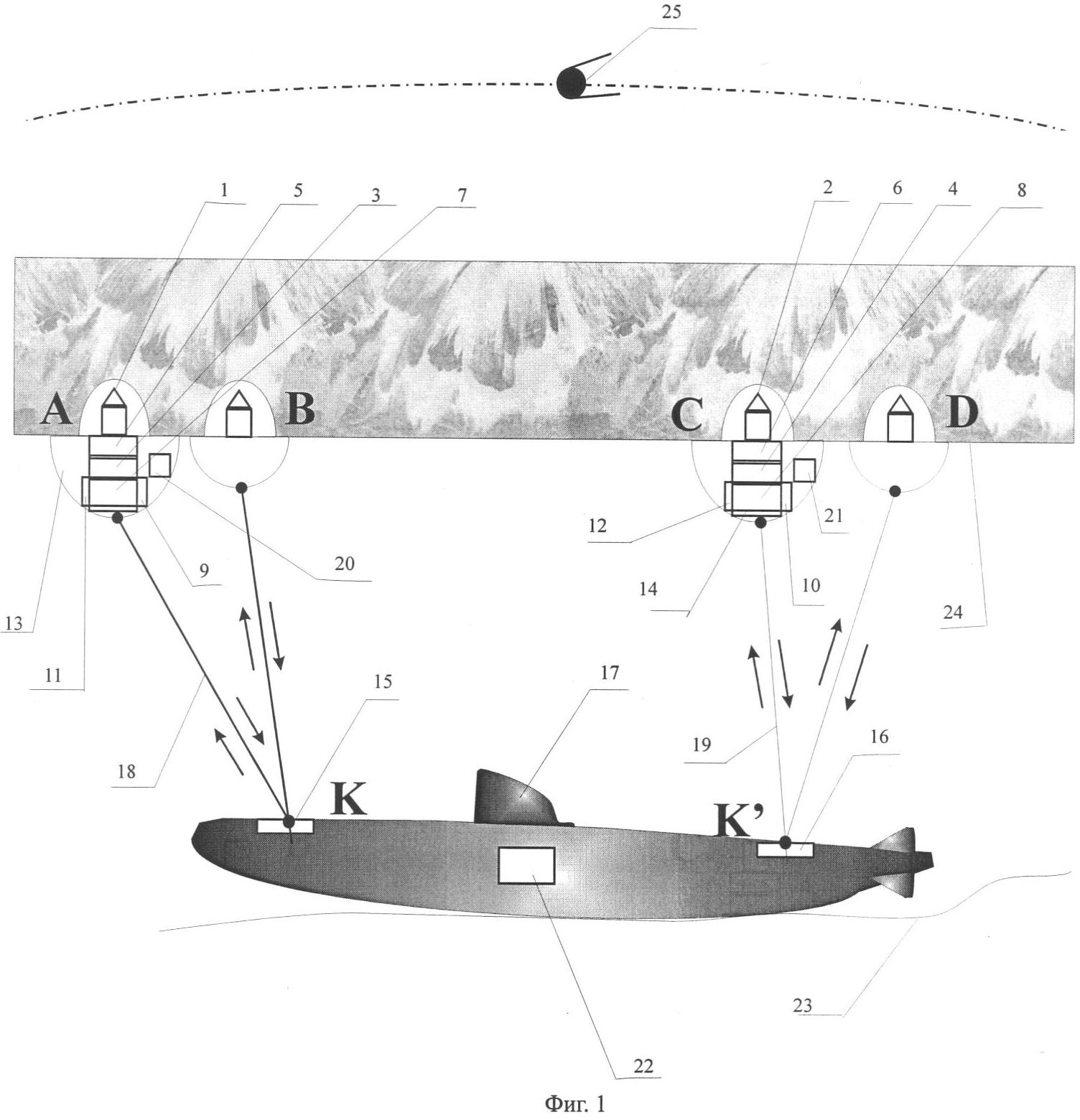
Изобретение относится к области использования спутниковых навигационных систем (СНС) и может быть применено для коррекции инерциальной навигационной системы (ИНС) подводного объекта при нахождении его в Северном Ледовитом океане (СЛО) подо льдом на горизонте плавания. Известен способ подледного приема сигналов СНС на антенну, включающий приледнение подводного объекта рубкой к нижней кромке ледового покрова, образование полости во льду, размещение в ней антенны приемника СНС, удаление из полости воды, прием «сухой» антенной через лед сигнала НС и определение по их значениям геодезических координат подводного объекта (см. патент №2119703 на изобретение «Способ подледного приема сигналов спутниковых навигационных систем» Патентообладатель: Катенин Владимир Александрович. Приоритет изобретения: 22 мая 1997 г.). Известно устройство для осуществления данного способа подледного приема сигналов СНС, содержащее механизм ввода антенны приемника СНС в лед, включающий данную антенну, выполненную в виде механического бура или электротермического бура, или паровоздушного устройства, представляющего собой полую трубу диаметром 200 мм, внутри которой проложен трубопровод воздуха высокого давления и паропровод, когда для создания полости во льду используется паровоздушное устройство; выдвижное устройство перемещается в вертикальной плоскости и вращается с помощью редуктора от электромотора; приемник сигналов СНС, вход которого соединен с выводом антенны (см. там же). Недостатком известных способа приема сигналов СНС и устройства для его реализации является то, что при их использовании, исходя из технической сущности, получают информацию, по которой возможно определить вычислительным путем только лишь обсервованные геодезические координаты подводного объекта, и невозможно определение вычислительным путем по этой же информации поправки к истинному курсу подводного объекта, вырабатываемого бортовой ИНС, а следовательно, не представляется возможным осуществить коррекцию истинного курса бортовой ИНС подо льдом. Известно (см. патент № 2295808 на изобретение «Способ подледного приема сигналов спутниковых навигационных систем и устройство для его осуществления». Патентообладатель: Федеральное государственное унитарное предприятие «Государственный научно-исследовательский навигационно-гидрографический институт МО РФ» (RU). Приоритет изобретения: 08 июля 2004 г.) устройство для осуществления данного способа, наиболее близкое по технической сущности с заявленным устройством данного способа, содержащее первую и вторую антенны приемников сигналов СНС, разнесенных на заданное расстояние, первый и второй механизм ввода данных антенн в лед, включающий выполнение данных антенн в виде головки механического бура или в виде электротермического бура или паровоздушного устройства, каждая из которых закреплена в верхней части первого и второго выдвижных устройств соответственно, представляющих собой полую трубу диаметром 200 мм, внутри которой проложен трубопровод воздуха высокого давления, перемещаемых вертикально вверх и вращаемых с помощью редукторов и электромотора соответственно, которые установлены в заданных местах рубки и в носовой части подводного объекта, первого и второго приемников сигналов СНС, вход которых соединен с выходом первой и второй антенны, блоком управления, блоком определения поправки к истинному курсу, вырабатываемому ИНС подводного объекта, при этом блок управления соединен с входами приемников сигналов СНС и блоком определения поправки к истинному курсу, вырабатываемому ИНС подводного объекта, вход которого соединен с выходами двух приемников сигналов СНС. Недостатком данных известных способа подледного приема сигналов СНС и устройства для его осуществления является то, что при их использовании необходимо выполнять весьма сложные и трудоемкие действия, а именно: – осуществлять всплытие подводного объекта, например, с заданного горизонта его плавания до нижней кромки льда; – приледнение к нижней кромке льда подводного объекта в местах нахождения антенны СНС. В результате этого не представляется возможным определение поправок к счислимым координатам и к истинному курсу, вырабатываемых ИНС подводного объекта, а следовательно, осуществления коррекции бортовой ИНС на подводном объекте при нахождении его на заданном горизонте плавания, что существенно понижает эффективность навигационного обеспечения подводных объектов в Северном Ледовитом океане. В настоящее время в России и за рубежом отсутствует способ и устройство определения поправок к счислимым координатам и к истинному курсу, вырабатываемых бортовой ИНС на подводном объекте при нахождении его на заданном горизонте плавания. Целью изобретения является расширение функциональных возможностей путем обеспечения определения с требуемой точностью поправки к истинному курсу, вырабатываемому бортовой ИНС подводного объекта при нахождении его на заданном горизонте плавания. Указанный результат достигается тем, что в способе, включающем ввод в лед первой и второй антенн первого и второго приемников СНС в местах приледнения данных антенн к нижней кромке льда, прием этими антеннами сигналов космических навигационных аппаратов, измерение первым и вторым приемниками СНС параметров этих сигналов и по их значениям определение расчетным путем обсервованных геодезических координат мест расположения антенн во льду и по их значениям поправку к истинному курсу, вырабатываемому ИНС подводного объекта, осуществление путем учета данной поправки коррекции бортовой ИНС, доставляют от горизонта плавания подводного объекта до места приледнения к нижней кромке льда первую антенну с механизмом внедрения в лед с первым приемником сигналов СНС и совместно с первой малогабаритной инерциальной навигационной системой, первый измеритель времени, первый регистратор, первый блок управления с помощью первой положительной плавучести, закрепленной на кабель-тросе первого спускоподъемного устройства (аварийного буя), расположенного на корпусе подводного объекта в заданном месте, вторую антенну с механизмом ее внедрения в лед, второй приемник сигналов СНС, вторую малогабаритную инерциальную навигационную систему, второй измеритель времени, второй регистратор и второй блок управления с помощью второй положительной плавучести, закрепленной на кабель – тросе второго спускоподъемного устройства (аварийного буя), расположенного на корпусе подводного объекта в другом заданном месте; после приема первой и второй антеннами сигналов космических навигационных аппаратов удаляют их ото льда и доставляют первую и вторую положительные плавучести с помощью первого и второго спускоподъемных устройств соответственно до мест их штатного расположения на корпусе подводного объекта, а затем повторно доставляют первую и вторую положительные плавучести с расположенными внутри них вышеуказанными техническими средствами к нижней кромке льда до мест их приледнения, повторно вводят в лед первую и вторую антенны СНС в местах их применения к нижней кромке льда, при этом повторно производят данными антеннами прием сигналов космических навигационных аппаратов, измеряют их параметры и определяют по значениям данных параметров обсервованные геодезические координаты мест расположения первой и второй антенн во льду, фиксируют время приема первой и второй антеннами сигналов космических навигационных аппаратов при первом и повторном нахождении их во льду, а также время начала повторной доставки первой и второй положительной плавучести от мест расположения первого и второго спускоподъемного устройств до нижней кромки льда, определяют последовательно счислимые геодезические координаты первой и второй малогабаритной инерциальной навигационной системы с привязкой их по времени в течение всего периода, характеризующегося временем, прошедшим от первого внедрения первой и второй антенн в лед, и повторным их внедрением в лед в местах их приледнения; по полученным данным определяют расчетным путем обсервованные геодезические координаты места расположения на подводном объекте соответственно первого и второго спускоподъемного устройства по информации, полученной в один и тот же момент времени. Указанный результат достигается также тем, что в известном устройстве для осуществления способа подледного приема сигналов СНС, содержащем первую и вторую антенны, первый и второй приемники СНС, первый и второй механизм ввода соответственно первой и второй антенн в лед, первый и второй блок управления, блок определения поправки к истинному курсу подводного объекта, выработанного ее бортовой ИНС, при этом выходы первой и второй антенн соединены с входами соответственно первого и второго приемников СНС, первый и второй блок управления соединен с первым и вторым механизмами ввода соответственно первой и второй антенн в лед и с входами первого и второго приемников СНС; дополнительно введенные первая и вторая малогабаритные инерциальные навигационные системы, первый и второй измеритель времени, первый регистратор, первый блок управления с помощью первой положительной плавучести, закрепленной на кабель-тросе первого спускоподъемного устройства, расположенного на корпусе подводного объекта в заданном месте, вторую антенну, второй механизм внедрения ее в лед, второй приемник СНС, вторую малогабаритную инерциальную навигационную систему, второй измеритель времени, второй блок управления, второй регистратор с помощью второй положительной плавучести, закрепленной на кабель-тросе второго спускоподъемного устройства, расположенного на корпусе подводного объекта в другом заданном месте; после приема этими первой и второй антеннами сигналов космических аппаратов удаляют их ото льда и доставляют первую и вторую положительные плавучести с помощью первого и второго спускоподъемного устройства соответственно до мест их расположения на корпусе подводного объекта, а затем повторно доставляют первую и вторую положительные плавучести с расположенными внутри их корпуса вышеуказанными техническими средствами к нижней кромке льда до мест их приледнения. Повторно вводят в лед первую и вторую антенны в местах их приледнения к нижней кромке льда, при этом повторно производят данными антеннами прием сигналов космических аппаратов, измеряют их параметры и определяют по значениям данных параметров обсервованные геодезические координаты мест расположения первой и второй антенн во льду, фиксируют время приема первой и второй антеннами сигналов космических аппаратов при первом и повторном нахождении их во льду, а также время начала повторной доставки первой и второй положительных плавучестей от мест расположения первого и второго спускоподъемного устройств до нижней кромки льда, определяют последовательно счислимые геодезические координаты первой и второй малогабаритной инерциальной навигационной системы с привязкой их по времени в течение всего периода, характеризующегося временем, прошедшим от первого внедрения первой антенны в лед, и повторным их внедрением в лед в местах их приледнения; по полученным данным определяют расчетным путем обсервованные геодезические координаты мест расположения на подводном объекте соответственно первого и второго спускоподъемного устройства по информации, полученной в один и тот же момент времени. Указанный результат достигается также тем, что в известном устройстве для осуществления способа подледного приема сигналов СНС, содержащем первую и вторую антенны, первый и второй приемник СНС, первый и второй механизм ввода соответственно первой и второй антенны в лед, первый и второй блок управления, блок определения поправки к истинному курсу подводного объекта, выработанному ее бортовой ИНС, при этом выходы первой и второй антенны соединены с входами соответственно первого и второго приемников СНС, первый и второй блок управления соединен с первым и вторым механизмом ввода и с входами первого и второго приемников соответственно первой и второй антенн в лед. Дополнительно введенные первая и вторая малогабаритные инерциальные навигационные системы, первый и второй измеритель времени, первый и второй регистратор, первая и вторая положительные плавучести, первое и второе спускоподъемное устройство, закрепленные в заданных местах на корпусе подводного объекта, а первая и вторая положительные плавучести закреплены ина кабель-тросе соответственно первого и второго спускоподъемных устройств; внутри корпуса первой и второй положительной плавучести установлены соответственно первая и вторая антенны, первый и второй механизмы ввода этих антенн в лед, приемник СНС, первый и второй механизмы ввода первой и второй антенны в лед, первая и вторая малогабаритная инерциальная навигационная система, первый и второй измеритель времени, первый и второй регистраторы, первый и второй блоки управления. При этом входы первой и второй данных систем через первый и второй блок управления соединены соответственно с выходом первого и второго приемников СМНС, первого и второго приемников СНС, первого и второго измерителя времени, а выходы первой и второй данных систем – соответственно с входом первого и второго регистратора, выходы которых соответственно через первый и второй блоки управления соединены с входом блока определения поправки к истинному курсу подводного объекта, выработанного бортовой ИНС. Сущность изобретения заключается в том, что в заявленном способе подледного приема сигналов СНС и устройства для его осуществления производится вместо приледнения подводного объекта к нижней кромке льда носом и рубкой в местах, в которых установлены антенны приемников СНС, доставляют от горизонта плавания подводного объекта, от мест установки на корпусе подводного объекта в заданных местах первого и второго спускоподъемных устройств до нижней кромки льда, закрепленные на кабель-тросе данных устройств положительных плавучестей, внутри которых установлены соответственно первая и вторая антенны первого и второго приемников СНС, первый и второй механизм ввода первой и второй антенн в лед, первая и вторая малогабаритные инерциальные навигационные системы, первый и второй измеритель времени, первый и второй блок управления, при этом входы данных систем через первый и второй блок управления соединены соответственно с выходами первого и второго приемников СНС, первого и второго измерителя времени, а выходы данных систем – соответственно с входами первого и второго регистратора, выходы которых через первый и второй блок управления соединены с входом блока определения поправки к истинному курсу подводного объекта, выработанного бортовой ИНС. После внедрения первой и второй антенн в лед в местах их приледнения к нижней кромке льда и приема ими сигналов космических аппаратов, измерения параметров этих сигналов, удаления данных антенн от льда и доставляют их до мест расположения первого и второго спускоподъемного устройства на подводном объекте; а затем одновременно повторно доставляют первую и вторую положительную плавучести с расположенными в их корпусах указанными средствами к нижней кромке льда до мест их приледнения, повторно вводят в лед первую и вторую антенны, при этом повторно производят данными антеннами прием сигналов космических аппаратов, измеряют их параметры и определяют по значениям данных параметров обсервованные геодезические координаты мест расположения первой и второй антенн во льду, фиксируют время приема первой и второй антеннами сигналов космических аппаратов при первом и повторном нахождении их во льду, а также время начала одновременной повторной доставки первой и второй положительных плавучестей от мест расположения первого и второго спускоподъемного устройства до мест приледнения их к нижней кромке льда, определяют последовательно счислимые геодезические координаты первой и второй малогабаритной инерциальной навигационной системы с привязкой их по времени в течение периода, характеризующегося временем, прошедшим от первого внедрения первой и второй антенн в лед, и повторным их внедрением в лед в местах их повторного приледнения к нижней кромке льда, по полученным данным определяют расчетным путем обсервованные геодезические координаты мест расположения на подводном объекте соответственно первого и второго спускоподъемных устройств в один и тот же момент времени, а по ним – определение вычислительным путем поправку к истинному курсу подводного объекта, выработанного бортовой инерциальной навигационной системой. Предложенное техническое решение обеспечивает повышенную скрытность (за счет нахождения подводного объекта подо льдом на заданном горизонте ее плавания), обеспечение получения информации для определения вычислительным путем поправки к истинному курсу подводного объекта, вырабатываемого ее бортовой ИНС с требуемой точностью при нахождении ее на заданном горизонте плавания с требуемой точностью. Предлагаемое техническое решение является новым, поскольку из общедоступных сведений не известен способ и устройство подледного приема сигналов СНС, обеспечивающих повышенную скрытность определения поправок к истинному курсу подводного объекта с требуемой точностью на заданном горизонте его плавания. Предлагаемое техническое решение имеет изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что заявленная дополнительная новая совокупность действий совместно с действиями прототипа – способа подледного приема сигналов СНС – обеспечит получение информации для определения с требуемой точностью координат места и поправки к истинному курсу подводного объекта, вырабатываемого его бортовой ИНС при нахождении его подо льдом на заданном горизонте плавания. Предлагаемое техническое решение промышленно применимо, так как для его реализации могут быть использованы стандартное оборудование и приспособления, используемые для изготовления морских приборов и технических средств, а также существующих средств навигации. Пример выполнения. На фиг.1 схематически изображен способ подледного приема сигналов СНС. На фиг.2 схематически изображена структурная схема для осуществления способа подледного приема сигналов СНС. Устройство для осуществления заявленного способа подледного приема сигналов СНС с горизонта плавания подводного объекта содержит первую – 1 и вторую – 2 антенну, первый – 3 и второй – 4 приемники сигналов СНС, первый – 5 и второй – 6 механизм ввода соответственно первой и второй антенн в лед, первую – 7 и вторую – 8 малогабаритную ИНС, первый – 9 и второй – 10 измеритель времени, первый – 11 и второй – 12 регистраторы, первую – 13 и вторую – 14 положительные плавучести, первое – 15 и второе – 16 спускоподъемные устройства (аварийные буи), закрепленные в заданных местах на корпусе подводного объекта – 17, а первая – 13 и вторая – 14 положительные плавучести закреплены на первом – 18 и втором – 19 кабель-тросе соответственно первого – 15 и второго – 16 спускоподъемных устройств, первый – 20 и второй – 21 блок управления. Данные технические средства под номерами 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 20, 21 установлены соответственно во внутреннем корпусе первой -13 и второй – 14 положительной плавучести, а введенный блок – 22 определения поправки к истинному курсу подводного объекта – 17, выработанного бортовой ИНС, расположен во внутреннем корпусе подводного объекта – 17. При этом входы данных 7 и 8 систем через первый и второй блоки управления соединены соответственно с выходами первого – 3 и второго – 4 приемников сигналов СНС первого – 9 и второго – 10 измерителей времени, а выходы данных 7 и 8 систем – с входом первого – 11 и второго – 12 регистраторов, выходы которых через первый – 20 и второй – 21 блоки управления соединены с входом блока – 22 определения поправки к истинному курсу подводного объекта – 17, выработанного его бортовой ИНС, расположенной внутри корпуса подводного объекта – 17. В качестве первого – 15 и второго – 16 спускоподъемных устройств может быть использована, например, морская лебедка типа «Лерок». В качестве первой – 13 и второй – 14 положительной плавучести может быть использован аварийный буй подводного объекта, расположенный в носу и в корме подводного объекта. В качестве первой – 1 и второй – 2 антенн и первого – 3 и второго – 4 приемника сигналов может быть использована СНС типа ГЛОНАСС (GPS). В качестве первой – 7 и второй – 8 малогабаритной инерциальной навигационной системы может быть использована морская интегрированная малогабаритная система типа «Кама», разработанная Пермской научно-производственной приборостроительной кампанией, или портативная USB с инерциальной навигационной системой INS и GPS фирмы. Первый – 20 и второй – 21 блок управления может быть реализован на основе микропроцессора, обеспечивающего ввод-вывод информации и преобразование сигналов от нескольких датчиков, например, микропроцессор семейства A8rR фирмы АТМЕС. Первый – 5 и второй – 6 механизмы ввода соответственно первой – 1 и второй – 2 антенн в лед, включающие выполнение каждой из данных антенн в виде головки, например, механического бура, которая закреплена в верхней части выдвижного устройства, представляющего собой полую трубу диаметром 200 мм, внутри которой проложен трубопровод воздуха высокого давления, выдвижное устройство перемещается в вертикальной плоскости и вращается с помощью редуктора от электромотора, которое закреплено в определенном месте внутри корпуса положительной плавучести. Первый – 5 и второй – 6 механизмы ввода соответственно первой – 1 и второй – 2 антенн в лед может включать данные антенны в виде электротермического бура конической формы, установленного на штатном выдвижном устройстве. Блок – 22 определения поправки к истинному курсу подводного объекта – 17 может быть реализован, например, на основе ПЭВМ PC/AT фирмы IBM со специальным программным обеспечением. Реализация заявленного способа подледного приема сигналов СНС заявленным устройством для его осуществления производится следующим образом. Подводный объект – 17 прекращает движение на заданном горизонте плавания – 23. По выработанным управляющим сигналам первый – 20 и второй – 21 блоки управления осуществляют следующее. Первое – 15 и второе – 16 спускоподъемное устройство производит вытравливание первого – 18 и второго – 19 кабель-тросов. В результате под действием подъемной силы первая – 13 и вторая – 14 положительные плавучести будут всплывать к нижней кромке льда – 24. В местах А и С приледнения данных положительных плавучестей к нижней кромке льда – 24 производится внедрение первой – 1 и второй – 2 антенн в лед соответственно первым – 5 и вторым – 6 механизмами ввода антенн в лед, прием ими сигналов космических аппаратов – 25, измерение параметров этих сигналов и определение по их значениям обсервованных геодезических координат мест А и С расположения первой – 1 и второй – 2 антенн во льду соответственно первым – 3 и вторым – 4 приемником сигналов СНС. Удаление данных антенн от льда и погружение их до мест расположения соответственно первого – 15 и второго – 16 спускоподъемных устройств на подводном объекте – 17 данными спускоподъемными устройствами. Затем одновременно повторно доставляются первая – 13 и вторая – 14 положительные плавучести, как выше изложено, к нижней кромке льда до мест В и Д приледнения данных плавучестей, повторно внедряют в лед первую – 1 и вторую – 2 антенны в данных местах соответственно первым – 5 и вторым – 6 механизмами ввода антенн в лед, повторно производят прием ими сигналов космических аппаратов – 25, измерение параметров этих сигналов и определение по их значениям обсервованных геодезических координат мест расположения первой – 1 и второй – 2 антенн во льду соответственно первым – 3 и вторым – 4 приемником СНС. Фиксируется время приема первой – 1 и второй – 2 антеннами сигналов космических аппаратов – 25 при первом и повторном нахождении их во льду, а также время начала повторной доставки первой – 13 и второй – 14 положительной плавучести от мест расположения первого – 15 и второго – 16 спускоподъемного устройства до мест приледнения их к нижней кромке льда первым – 9 и вторым – 10 измерителем времени. Определяют последовательно счислимые геодезические координаты первой – 7 и второй – 8 малогабаритной инерциальной навигационной системы с привязкой их по времени в течение всего периода, характеризующегося временем, прошедшим от первого внедрения первой – 1 и второй – 2 антенн в лед, и повторным их внедрением в лед в местах их повторного приледнения к нижней кромке льда, документируется полученная информация с помощью указанных технических средств за номерами 3, 4; 9, 10; 7, 8 первым – 11 и вторым – 12 регистраторами. По полученной информации определяют вычислительным путем искомую поправку
где А – азимут прямой линии, соединяющей центры мест установки первой – 13 и второй – 14 положительных плавучестей на корпусе подводного объекта – 20; ИК – истинный курс подводного объекта – 20, выработанный его бортовой инерциальной навигационной системой;
N, М – радиусы кривизны первого вертикала и меридиана; а – большая полуось земного эллипсоида; б – малая полуось земного эллипсоида; е’ – второй эксцентриситет земного эллипсоида;
положительной плавучести в период ее перемещения (см. фиг.1) по маршруту от точки А до места К первого – 15 спускоподъемного устройства и от него до точки В и второй – 14 положительной плавучести в период ее перемещения по маршруту от точки С до места К’ второго – 16 спускоподъемного устройства и от него до точки D соответственно;
i=1, 2, 3, …, n – порядковое число разностей j=1, 2, 3,…, n’ – порядковое число разностей K, n и K’, n’ – количество разностей При закреплении первой – 13 и второй – 14 положительных плавучестей в местах расположения первого – 15 и второго – 16 спускоподъемных устройств на корпусе подводного объекта – 20 на прямой линии, параллельной диаметральной плоскости подводного объекта – 20, угол Анализ формул (7)-(14) показывает, что в их правых частях под знаком суммы являются разности между смежными значениями счислимой широты и долготы. Можно предположить, что два смежных значения широты В случае, когда данные значения погрешностей незначительно отличаются, то будут возникать невязки Если случайные инструментальные погрешности в данных счислимых геодезических координатах малы по величине у современных малогабаритных инерциальных навигационных систем и имеют разные знаки, то они при большом количестве измерений данных счислимых координат в соответствии с теорией вероятностей будут под знаком суммы стремиться к нулю. Таким образом, средняя квадратическая погрешность
где Мо – радиальная средняя квадратическая погрешность определения прямоугольных геодезических координат центра места установки Например, для случая, когда Мо=0,1 м (погрешность определения прямоугольных координат с использованием GPS в дифференциальном режиме), D=100 м, n=1, то Технико-экономическая эффективность заявленных способа и устройства подледного приема сигналов СНС заключается в том, что впервые в мировой практике обеспечивается получение данных для определения поправки к истинному курсу подводного объекта при нахождении его на заданном горизонте плавания с требуемой современной точностью без приледнения его к нижней кромке льда.
Формула изобретения
1. Способ подледного приема сигналов спутниковых навигационных систем, включающий ввод в лед первой и второй антенн первого и второго приемников спутниковой навигационной системы в местах приледнения данных антенн к нижней кромке льда, прием первой и второй этими антеннами сигналов космических аппаратов, измерение данными первым и вторым приемниками параметров этих сигналов и по их значениям определение расчетным путем обсервованных геодезических координат мест расположения этих антенн во льду и по их значениям – поправку к истинному курсу, вырабатываемому инерциальной навигационной системой подводного объекта, осуществление путем учета данной поправки коррекции бортовой инерциальной навигационной системы, отличающийся тем, что доставляют от горизонта плавания подводного объекта до места приледнения к нижней кромке льда первую данную антенну с первым механизмом внедрения ее в лед, первый данный приемник, первую малогабаритную инерциальную навигационную систему, первый измеритель времени, первый блок управления и первый регистратор с помощью первой положительной плавучести (аварийного буя), закрепленной на кабель-тросе первого спускоподъемного устройства, расположенного на корпусе подводного объекта в заданном (штатном) месте; вторую данную антенну, второй механизм внедрения ее в лед, второй данный приемник, вторую малогабаритную инерциальную навигационную систему, второй измеритель времени, второй блок управления, второй регистратор с помощью второй положительной плавучести (аварийного буя), закрепленной на кабель-тросе второго спускоподъемного устройства, расположенного на корпусе подводного объекта в другом заданном (штатном) месте; после приема первой и второй антеннами сигналов космических аппаратов спутниковой навигационной системы удаляют их ото льда и доставляют первую и вторую положительные плавучести с помощью первого и второго спускоподъемных устройств соответственно до мест их расположения на корпусе подводного объекта, а затем повторно доставляют первую и вторую положительное плавучести с расположенными внутри их корпусов вышеуказанными техническими средствами к нижней кромке льда до мест их приледнения, повторно вводят в лед данные первую и вторую антенны в местах их приледнения к нижней кромке льда, при этом повторно производят данными антеннами прием сигналов космических аппаратов, измеряют их параметры и определяют по значениям данных параметров обсервованные геодезические координаты мест расположения первой и второй антенн во льду, фиксируют время приема данными первой и второй антеннами сигналов космических аппаратов при первом и повторном нахождении их во льду, а также время начала повторной доставки первой и второй положительной плавучести от мест расположения первого и второго спускоподъемных устройств до нижней кромки льда, определяют последовательно счислимые геодезические координаты первой и второй малогабаритной инерциальной навигационной системы с привязкой их по времени в течение всего периода, характеризующегося временем, прошедшим от первого внедрения первой и второй антенн в лед, и повторным их внедрением в лед в местах их приледнения; по полученным данным определяют расчетным путем обсервованные геодезические координаты мест расположения на подводном объекте соответственно первого и второго спускоподъемного устройства по информации, полученной в один и тот же момент времени. 2. Устройство для осуществления способа по п.1, содержащее первую и вторую антенны, первый и второй приемники спутниковой навигационной системы, первый и второй механизмы ввода соответственно первой и второй антенн в лед, первый и второй блоки управления, блок определения поправки к истинному курсу подводного объекта, выработанному его бортовой инерциальной навигационной системой, при этом выход первой и второй антенн соединен с входами соответственно первого и второго данных приемников, первый и второй блоки управления соединены соответственно с первым и вторым механизмами ввода соответственно первой и второй антенн в лед, с входами первого и второго приемников, отличающееся тем, что в него дополнительно введены первая и вторая малогабаритная инерциальная навигационная система, первый и второй измеритель времени, первый и второй регистратор, первая и вторая положительная плавучести, первое и второе спускоподъемное устройства, закрепленные в заданных (штатных) местах на корпусе подводного объекта, а первая и вторая положительные плавучести закреплены на кабель-тросе соответственно первого и второго спускоподъемных устройств, при этом внутри корпусов первой и второй положительной плавучести размещены соответственно первая и вторая антенны, первый и второй приемники, первый и второй механизмы ввода соответственно первой и второй антенн в лед, первая и вторая малогабаритная инерциальная навигационная система, первый и второй измеритель времени, первый и второй блок управления, первый и второй регистратор; при этом входы данных первой и второй систем через первый и второй блок управления соединены соответственно с выходами первого и второго приемников, первого и второго измерителя времени, а выходы первой и второй данных систем – соответственно с входами первого и второго регистратора, выходы которых соответственно через первый и второй блок управления соединены с входом блока определения поправки к истинному курсу подводного объекта, выработанному бортовой инерциальной навигационной системой.
РИСУНКИ
|
||||||||||||||||||||||||||
 ИК к истинному курсу подводного объекта – 17, выработанного бортовой ее ИНС в блоке определения поправки – 22 по специальному математическому алгоритму, составленному по следующим формульным зависимостям:
ИК к истинному курсу подводного объекта – 17, выработанного бортовой ее ИНС в блоке определения поправки – 22 по специальному математическому алгоритму, составленному по следующим формульным зависимостям:








 – угол, образованный прямой линией, соединяющей центры мест установки первой – 13 и второй – 14 положительной плавучестей на корпусе подводного объекта – 20, и диаметральной плоскостью подводного объекта – 17, который определяется в базе заблаговременно;
– угол, образованный прямой линией, соединяющей центры мест установки первой – 13 и второй – 14 положительной плавучестей на корпусе подводного объекта – 20, и диаметральной плоскостью подводного объекта – 17, который определяется в базе заблаговременно; a,
a,  a и
a и  – прямоугольные геодезические координаты центра места установки второй – 14 положительной плавучести;
– прямоугольные геодезические координаты центра места установки второй – 14 положительной плавучести; – обсервованные геодезические координаты мест внедрения первой – 1 и второй – 2 антенн в лед при первом и повторном их приледнении к нижней кромке льда в точках А, В, С и D (см. фиг.1) соответственно;
– обсервованные геодезические координаты мест внедрения первой – 1 и второй – 2 антенн в лед при первом и повторном их приледнении к нижней кромке льда в точках А, В, С и D (см. фиг.1) соответственно; – счислимые геодезические координаты первой – 13
– счислимые геодезические координаты первой – 13 – невязки в счислимых геодезических координатах по широте
– невязки в счислимых геодезических координатах по широте  и долготе
и долготе  соответственно;
соответственно; на маршруте от точки А (см. фиг.1) до места расположения первого – 15 спускоподъемного устройства и от него до точки В;
на маршруте от точки А (см. фиг.1) до места расположения первого – 15 спускоподъемного устройства и от него до точки В;
 на маршруте от точки С (см. фиг.1) до места расположения второго – 16 спускоподъемного устройства и от него до точки D;
на маршруте от точки С (см. фиг.1) до места расположения второго – 16 спускоподъемного устройства и от него до точки D; на маршруте от точки А до места расположения первого – 15 спускоподъемного устройства и от него до точки В; а также количество разностей на маршруте (см. фиг.1) от точки С до места расположения второго – 16 спускоподъемного устройства и от него до точки D.
на маршруте от точки А до места расположения первого – 15 спускоподъемного устройства и от него до точки В; а также количество разностей на маршруте (см. фиг.1) от точки С до места расположения второго – 16 спускоподъемного устройства и от него до точки D. и
и  и долготы
и долготы  и
и  и долготы
и долготы  и
и  имеют практически одинаковые постоянные и систематические погрешности, а следовательно, в разности они будут практически исключены.
имеют практически одинаковые постоянные и систематические погрешности, а следовательно, в разности они будут практически исключены.

 которые исключаются путем их разброса по формулам (9), (10); (13), (14).
которые исключаются путем их разброса по формулам (9), (10); (13), (14). заявленным способом и устройством, исходя из их технической сущности, определяется погрешностью
заявленным способом и устройством, исходя из их технической сущности, определяется погрешностью  азимута А, которую с учетом теории вероятностей можно вычислить по формуле
азимута А, которую с учетом теории вероятностей можно вычислить по формуле

 второй – 14 положительной плавучести.
второй – 14 положительной плавучести. указанную в нормативных документах по навигации.
указанную в нормативных документах по навигации.