Патент на изобретение №2342681
|
||||||||||||||||||||||||||
(54) СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ МОРЕПЛАВАНИЯ СУДОВ С БОЛЬШОЙ ОСАДКОЙ И ВОДОИЗМЕЩЕНИЕМ
(57) Реферат:
Изобретение относится к области гидроакустики и может быть использовано на судах с большой осадкой и водоизмещением (СБОВ): супертанкера и др., а также на пассажирских судах: лайнерах и др., на обитаемых подводных аппаратах (ОПА): туристические подводные лодки и др. для дальнего обнаружения морских млекопитающих (ММ): китов и др., айсбергов и обитаемых подводных аппаратов (ОПА) различного назначения в интересах предупреждения столкновений с ними. Задача, которая решается изобретением, заключается в дальнем обнаружении, идентификации и оценке пространственных координат морских объектов (МО): ММ, айсбергов и ОПА по информации, содержащейся в гидроакустических высокочастотных (ВЧ) волнах накачки, излучаемых в носовых секторах СБОВ, рассеянных на неоднородностях водной среды: глубинном пузырьковом слое (ГПС) и др., в гидроакустических низкочастотных (НЧ) волнах, формируемых в процессе жизнедеятельности ММ, таяния и разрушения айсбергов, движения ОПА, а также в ВЧ-комбинационных волнах, образованных в неоднородной морской среде за счет нелинейного взаимодействия гидроакустических ВЧ-волн накачки и НЧ-гидроакустических волн от МО, относительно простым способом в условиях СБОВ для обеспечения безопасности их мореплавания. 7 ил.
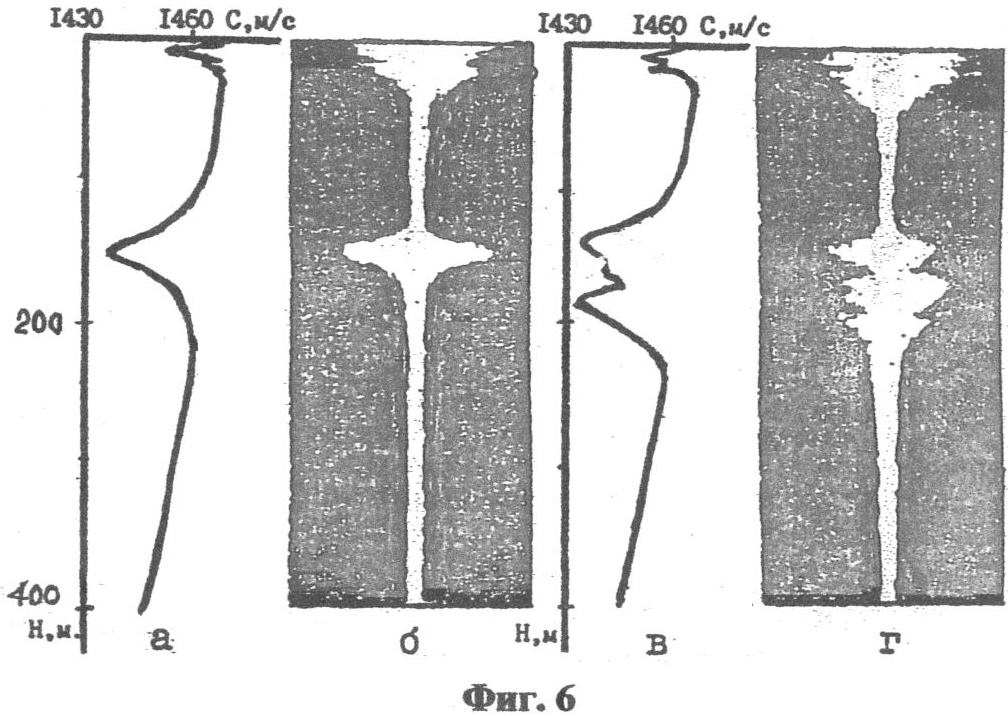
Изобретение относится к области акустики, к нелинейной гидроакустике, в частности, и может быть использовано на судах с большой осадкой и водоизмещением (СБОВ): супертанкера и др., а также на пассажирских судах: лайнерах и др., на обитаемых подводных аппаратах (ОПА): туристические подводные лодки и др. для дальнего обнаружения морских млекопитающих (ММ): китов и др., айсбергов и обитаемых подводных аппаратов (ОПА) различного назначения в интересах предупреждения столкновений с ними. Задача, которая решается изобретением, заключается в дальнем обнаружении, идентификации и оценке пространственных координат морских объектов (МО): ММ, айсбергов и ОПА по информации, содержащейся в гидроакустических высокочастотных (ВЧ) волнах накачки, излучаемых в носовых секторах СБОВ, рассеянных на неоднородностях водной среды: глубинном пузырьковом слое (ГПС) и др., в гидроакустических низкочастотных (НЧ) волнах, формируемых в процессе жизнедеятельности ММ, таяния и разрушения айсбергов, движения ОПА, а также в ВЧ-волнах комбинационных волнах, образованных в неоднородной морской среде за счет нелинейного взаимодействия гидроакустических ВЧ-волн накачки и НЧ-гидроакустических воли от МО, относительно простым способом в условиях СБОВ для обеспечения безопасности их мореплавания. Известен способ обнаружения МО по их первичному гидроакустическому полю, заключающийся в приеме шумов и сигналов в звуковом (ЗД) и ультразвуковом (УЗД) диапазонах частот, их усилении, спектральном аннализе с целью выделения наиболее информативных классификационных признаков, сравнении их с эталонным сигналом и принятии решения об обнаружении МО [1, стр.342]. К недостаткам данного способа относятся: 1. Незначительная (единицы км) дальность действия из-за использования ЗД и УЗД частот. 2. Влияние зон «акустической тени», обусловленных особенностями распространения гидроакустических волн ЗД и УЗД частот в неоднородной (содержащей звукорассеивающие слои, а также слои с большим градиентом температуры и др.) морской среде. 3. Низкая достоверность идентификации обнаруженных объектов из-за невозможности использования низкого звукового (НЗД) и инфразвукового (ИЗД) диапазонов частот, в которых сосредоточена основная энергия подводных шумов МО и регистрируется наибольшее количество дискретных составляющих (ДС) в их спектрах. 4. Невозможность применения на повышенных (более 10-12 узл.) скоростях хода носителя из-за высокого уровня собственных помех. 5. Невозможность применения в условиях ОНА и неспециализированного судна из-за больших (десятки-сотни м) размеров антенн др. Известен способ обнаружения МО по их вторичному гидроакустическому полю, заключающийся в формировании и излучении в направлении объекта поиска импульсного сигнала ЗД и УЗД частот, лоцировании объекта поиска, приеме отраженного сигнала (эхо-сигнала), сравнении его с эталонным сигналом и принятие решения об обнаружении МО [1, стр.91]. К недостаткам данного способа относятся: 1. Малая дальность действия, обусловленная использованием ЗД и УЗД частот. 2. Влияние зон «акустической тени», обусловленных особенностями распространения гидроакустических волн ЗД и УЗД частот в неоднородной морской среде. 3. Наличие «мертвых» зон, обусловленных реверберацией (послезвучанием) излученного сигнала. 4. Зависимость эффективности способа от ракруса (взаимного угла) облучения МО. 5. Невозможность применения на повышенных (более 10-12 узл.) скоростях хода носителя из-за высокого уровня собственных помех. 6. Низкая достоверность идентификации обнаруженных МО из-за использовании информации, только содержащейся в эхо-сигнале. Известен способ обнаружения источника НЧ-гидроакустических излучений, заключающийся в формировании, усилении и излучении шумового ВЧ-сигнала накачки, приеме сигналов комбинационных частот, нахождении функции корреляции между принятым сигналом накачки и задержанным случайным шумовым сигналом, формировании эквивалентной приемной антенной решетки, выделении НЧ-полезного сигнала из ВЧ-комбинационных частот, его спектральном анализе и сравнении с эталонным сигналом [2]. К недостаткам данного способа относится: 1. Ограниченная дальность действия из-за не использования ИЗД. 2. Низкая достоверность идентификации обнаруженных объектов из-за невозможности использования диапазона частот ниже 35 Гц. 3. Невозможность применения на повышенных (более 10-12 узл.) скоростях хода носителя из-за высокого уровня собственных помех. 4. Невозможность применения в условиях ОПА и неспециализированного судна из-за больших (десятки-сотни м.) размеров антенн др. Наиболее близким по технической сущности к заявляемому относится способ, выбранный в качестве способа-прототипа, обнаружения, идентификации и оценки пространственных координат МО, заключающийся в том, что с помощью n излучателей, расположенных на одинаковом угловом расстоянии на корпусе ОПА и ориентированных вверх, вниз и в обе стороны от ОПА, излучается ВЧ-сигнал накачки на n частотах водную среду, при этом базовая частота ВЧ-сигнала накачки соответствует резонансной частоте приповерхностного пузырькового слоя (ППС), рассеянный в ППС и промодулированным по амплитуде НЧ-полезным сигналом, ВЧ-сигнал накачки принимается с помощью n приемников, расположенных на одинаковом угловом расстоянии на корпусе ОПА и ориентированных вверх, вниз и в обе стороны от ОПА, при этом направленность по приему формируется за счет волновых размеров каждого из n приемников и соответствующей ему частоте ВЧ-сигнала накачки, а определение направления на источник НЧ-гидроакустических излучений осуществляется по максимальному значению полезного НЧ-сигнала путем последовательного подключения к решающему устройству каждого из n приемников [3]. К недостаткам данного способа относятся: 1. Незначительная дальность действия, обусловленная низкой акустической чувствительностью и низкой помехоустойчивостью. 2. Невозможность применения на повышенных (более 10-12 узл.) скоростях хода носителя из-за высокого уровня собственных помех и др. 3. Недостаточная достоверность идентификации обнаруженных МО. 4. Сложность обнаружения МО, находящихся прямо по курсу и на носовых курсовых углах. 5. Низкая точность оценки пространственных координат обнаруженных МО. Задача, которая решается изобретением, заключается в разработке способа, свободного от перечисленных выше недостатков. Технический результат предложенного способа заключается в увеличении дальности действия, применении на повышенных (более 10-12 узл.) скоростях хода носителя, повышении достоверности идентификации, упрощении процедуры обнаружения МО, находящихся на носовых курсовых углах, а также в повышении точности оценки пространственных координат обнаруженных МО. Поставленная цель достигается тем, что в известном способе обеспечения безопасности мореплавания СБОВ заключающемся в формировании, усилении и излучении ВЧ-сигнала накачки в водную среду на n частотах с помощью n излучателей, расположенных на корпусе носителя, при этом базовая частота ВЧ-сигнала накачки соответствует резонансной частоте рассеивателей звука, доминирующих в области взаимодействия акустических волн, рассеянный и промодулированный по амплитуде НЧ-полезным сигналом ВЧ-сигнал накачки принимается с помощью n приемников, расположенных на корпусе носителя, при этом направленность по приему формируется за счет волновых размеров каждого из n приемников и соответствующей ему частоте ВЧ-сигнала накачки, из принятого ВЧ-сигнала накачки выделяется НЧ-полезный сигнал, а определение направления на его источник осуществляется по максимальному значению НЧ-полезного сигнала путем последовательного подключения к решающему устройству каждого из n приемников, в качестве носителя используется СБОВ, n излучатели и n приемники расположены под водой попарно в его носовой части, а также в левом и правом носовых секторах и образуют общий сектор наблюдения, n приемники ориентированы, в основном, для приема акустических лучей, не выходящих на поверхность моря, в качестве n частот используется базовая частота I. Увеличение дальности действия способа достигается за счет: 1. Повышения акустической чувствительности путем увеличения эффективности преобразования акустической энергии ВЧ-волн накачки в акустическую энергию ВЧ-волн комбинационных частот путем излучения ВЧ-сигнала накачки на резонансных частотах рассеивателей звука доминирующих в соответствующей области взаимодействия ВЧ-волны накачки и НЧ-полезного сигнала от МО. 2. Многоканальной пространственной обработки модуляционного процесса и последующего суммирования НЧ-полезного сигнала по каждой из XH. 3. Многоканальной частотной – основная частота накачки и ее высшие гармоники, обработки модуляционного процесса и последующего суммирования НЧ-полезного сигнала по каждому частотному каналу в данном пространственном канале и др. II. Возможность применения на повышенных (более 10-12 узл., или более 20 км/ч) скоростях хода носителя достигается тем, что: 1. Повышается акустическая чувствительность способа путем увеличения эффективности преобразования акустической энергии ВЧ-волн накачки в акустическую энергию ВЧ-волн комбинационных частот. 2. Используется многоканальная пространственная обработка модуляционного процесса и последующее суммирование НЧ-полезного сигнала. 3. Используется многоканальная частотная обработка модуляционного процесса и последующее суммирование НЧ-полезного сигнала и др. III. Повышение достоверности идентификации (классификации) обнаруженных МО достигается за счет: 1. Увеличения эффективности преобразования акустической энергии ВЧ-волн накачки в акустическую энергию ВЧ-волн комбинационных частот. 2. Использования информации, содержащейся в формах спектров ВЧ-комбинационных частот и НЧ-полезного сигнала, а также в частотных поддиапазонах НЧ-полезного сигнала. 3. Использования, в основном, информации о водных акустических лучах (не выходящих на поверхность моря) принятых n приемниками, расположеными в диаметральной плоскости по носу СБОВ, а также в его левом и в его правом носовых секторах (курсовых углах). 4. Использования информации о величине изменения пеленга (ВИП) за выбранную единицу времени (например, за 1 мин.). IV. Упрощение процесса обнаружения МО, находящихся на носовых курсовых углах, достигается применением n излучателей ВЧ-сигнала накачки и n приемников ВЧ-сигнала накачки, расположенных в диаметральной плоскости по носу СБОВ, а также в его левом и правом носовых секторах. V. Повышение точности оценки пространственных координат обнаруженных МО достигается за счет того, что: 1. Сокращен сектор наблюдения ( с 360° до 120°). 2. n излучателей ВЧ-сигнала накачки, а также n приемников ВЧ-сигнала накачки расположены в диаметральной плоскости по носу СБОВ, а также в его левом и правом носовых секторах 3. n приемников ВЧ-сигнала накачки ориентированы, в основном, для приема водных акустических лучей. 4. Используется многоканальная частотная обработка модуляционного процесса. При этом ХН имеют (на основной частоте ВЧ-сигнала накачки и ее высших гармониках) разную ширину основного максимума. 5. Повышается разрешающая способность по направлению и точность пеленгования объектов за счет более высокого соотношения сигнал/помеха, которое достигается: – повышением эффективности преобразования акустической энергии ВЧ-волн накачки в акустическую энергию ВЧ-волн комбинационных частот; – суммирования НЧ-полезного сигнала по каждому пространственному каналу (по каждой ХН); – суммирования НЧ-полезного сигнала по каждому частотному каналу и др. Отличительными от прототипа признаками способа являются: 1. В качестве носителя используется СБОВ. 2. N излучатели и n приемники расположены под водой попарно в носовой части СБОВ, а также в его левом и правом носовых секторах и образуют общий носовой сектор наблюдения. 3. N приемники ориентированы, в основном, для приема акустических лучей, не выходящих на поверхность моря, т.е. водных акустических лучей. 4. В качестве n частот используется базовая частота со и ее высшие гармоники, при этом базовая частота 5. ХН n приемников частично перекрывают друг друга – при использовании базовой частоты 6. Рассеянный ВЧ-сигнал накачки дополнительно модулируется по фазе (частоте) НЧ-полезным сигналов. 7. Дополнительно n приемники к решающему устройству подключаются одновременно, и осуществляется многоканальная пространственная обработки ВЧ-сигнала накачки с последующим суммированием НЧ-полезного сигнала по каждой из n ХН. 8. Дополнительно осуществляется многоканальная частотная обработка ВЧ-сигнала накачки с последующим суммированием НЧ-полезного сигнала в каждой из n ХН. Наличие отличительных от прототипа признаков позволяет сделать вывод о соответствии заявляемого способа критерию “новизна”. Анализ известных технических решений с целью обнаружения в них указанных отличительных признаков, показал следующее. Признаки 1 и 2 являются новыми. Признаки 4, 7 и 8 являются новыми. В то же время известно использование признаков 4 и 7 в нелинейной гидроакустике, а признаков 5 и 8 – в гидроакустике. Признак 3 является известным в гидроакустике, а признак 6 известен в нелинейной гидроакустике. Таким образом, наличие новых существенных признаков, в совокупности с известными, обеспечивает появление у заявляемого решения нового свойства, не совпадающего со свойствами известных технических решений – на большой дальности (заблаговременно) обнаруживать опасные в навигационном отношении МО, в том числе и на повышенных (более 20 км/ч) скоростях хода носителя, а также с высокой достоверностью идентифицировать (классифицировать) их, при упрощении процедуры обнаружения МО, находящихся на носовых курсовых углах, а также с достаточной для практики точностью оценивать пространственные координаты обнаруженных МО. В данном случае мы имеем новую совокупность признаков и их новую взаимосвязь, причем не простое объединение новых признаков и уже известных в гидроакустике, а именно выполнение операций в предложенной последовательности и приводит к качественно новому эффекту. Данное обстоятельство позволяет сделать вывод о соответствии разработанного способа критерию “существенные отличия”. На фиг.1 индексом «а» обозначена функциональная схема устройства, а индексом «б» обозначены его акустические системы. На фиг.2 представлена структурная схема устройства, с помощью которой реализуется разработанный способ. На фиг.3 иллюстрируется пространственное расположение n XH при использовании базовой частоты ВЧ-сигнала накачки Устройство содержит МО (I): ОПА, ММ, айсберг и др., являющиеся источником низкочастотных (НЧ) гидроакустических излучений на частоте Бортовая аппаратура (5) также содержит последовательно электрически соединенные: многоканальный (по числу n излучателей) блок (13) формирования ВЧ-сигнала накачки на частоте Каждый из n каналов, например (15), содержит приемник (9) ВЧ-сигнала накачки, усилитель высокой частоты (27), идентичные друг другу m (по числу гармоник ВЧ-сигнала накачки) полосовые фильтры (28), центральная частота каждого из которых равна частоте соответствующей гармоники ВЧ-сигнала накачки, идентичные друг другу m амплитудные детекторы (29) с большим динамическим диапазоном и идентичные друг другу m балансные смесители (30), идентичные друг другу 2m фильтры (31) низких частот (ФНЧ) и идентичные друг другу 2m усилители (32) низких частот (УНЧ), сумматор (33) канала, являющийся выходом данного, в частности (15), из n каналов (15-17). Устройство функционирует следующим образом (фиг.1 – фиг.3). СБОВ (2): супертанкер и др., совершает плавание в море с ГПС, наличие которого обусловлено жизнедеятельностью морских биологических объектов (МБО), зоопланктона, фитопланктона и т.д. В районе плавания СБОВ (2) встречаются различные МО, в том числе и МО (1) не обнаружимые с помощью навигационной радиолокационной станцией (3) с антенной (4): ОПА, ММ и др., являющиеся источником низкочастотных (НЧ) гидроакустических излучений на частоте В многоканальном блоке (13) формируется ВЧ-сигнала накачки на частоте со в диапазоне единиц-десятков кГц и ее высших гармониках: 2 Частично рассеиваясь в ППС (излучение по боковому полю ХН излучателя), полностью рассеиваясь в ГПС (излучение по оси ХН излучателя) и частично рассеиваясь в ДПС (излучение по боковому полю ХН излучателя), ВЧ-сигнал накачки на частоте В каждом из n каналов, например (15) – левого борта СБОВ (2), принятый (ранее рассеянный на неоднородностях водной среды и промодулированный по амплитуде и фазе НЧ-полезным сигналом) ВЧ-сигнал: С выхода усилителя ВЧ-сигнал одновременно поступает, для уменьшения влияния НЧ- и ВЧ-помех (вне рабочего диапазона полосового фильтра) на идентичные друг другу m (по числу гармоник ВЧ-сигнала накачки) полосовые фильтры (28), центральная частота каждого из которых равна частоте соответствующей гармоники ВЧ-сигнала накачки: центральная частота первого из m полосовых фильтров (28) соответствует базовой частоте В спектроанализаторе (23) по особенностям спектра ВЧ-сигнала осуществляется первичная классификация (идентификация) обнаруженного МО (1) на классы: ОПА – в ВЧ-спектрах: С выхода каждого из m полосовых фильтров (29) ВЧ-сигнал: С выхода каждого из m амплитудных детекторов (29) и с выхода каждого из m балансных смесителей (30) НЧ-полезный сигнал В блоке (19), на основании расчетной дальности обнаружения того или иного МО (1) в данных гидролого-акустических и помехо-сигнальных условиях, по расчетному и текущему значениям сигнал/помеха и по другим признакам оценивается дистанция до обнаруженного МО (1). В спектроанализаторе (24) по особенностям спектра НЧ-сигнала осуществляется вторичная классификация обнаруженного МО (1) на подклассы. Например, класс ОПА подразделяется на подклассы: ОПА под турбиной (атомная подводная лодка), ОПА под дизелем (дизельная подводная лодка), ОПА под электромотором (батискаф и др.) и т.д.; класс ММ подразделяется на подклассы: кит, дельфин и т.д. Одновременно с этим, с выходов соответствующих m блоков (20) формирования ХН по каждой из гармоник ВЧ-сигнала накачки в каждом из n каналов НЧ-полезный сигнал С выходов: спектроанализатора (23) ВЧ-сигнала накачки, спектроанализатора (24) НЧ-полезного сигнала, блока (19) оценки дистанции, блока (21) определения пеленга, блока (22) определения ВИП и от различных других технических средств (навигационная радиолокационная станция, навигационный эхолот, лаг и т.д.) соответствующая информация поступает в решающее устройство (25). При этом с выхода решающего устройства (25) сигнал на вход устройства (26) оповещения (звукового, светового и т.д.) об обнаружении МО (1) подается сразу же после первичного обнаружения, первичной и вторичной классификации. После этого СБОВ (2) сразу же уменьшает ход до минимального. Затем осуществляется окончательная классификация МО (по данным многолетних наблюдений для данного района плавания, по информации от навигационной радиолокационной станции и т.д.) и определяются их пространственные координаты, а также принимаются меры (изменяется курс, стопорится или дается обратный ход, подаются сигналы, отпугивающие ММ и т.д.) по предотвращению столкновений с МО. При этом в решающее устройство (25) постоянно поступают данные о вновь обнаруженных сигналах различных источников, в том числе и от МО (1), гидролого-акустических условиях и волнении моря в данном географическом районе и др. (решающее устройство является адаптивной системой – приспосабливается к изменяющимся внешним условиям, а при принятии решения учитывает текущие параметры окружающей среды, а также самообучающей системой – постоянно совершенствует алгоритм принятия решения). Пример реализации способа. При проведении морских испытаний [4] использовалась параметрическая приемная антенная решетка (ППАР), состоящая из трех пар идентичных ВЧ-гидроакустических преобразователей (ВЧ-излучателей и ВЧ-приемников) от станции МГ-7М, имеющих в своей амплитудно-частотной характеристике три резонансные частоты: 48 кГц (ширина основного максимума ХН преобразователя 60°), 96 кГц и 144 кГц. На фиг.4 представлены типовые спектрограммы ВЧ-сигналов накачки, рассеянных на неоднородностях водной среды и промодулированные по амплитуде НЧ-полезным сигналами: ОПА (фиг.4а), айсберга (фиг.4б) и ММ – кита (фиг.4в). Как видно из фиг.4 формы спектров ВЧ-сигналов даже визуально существенно отличаются друг от друга: в спектре ВЧ-сигнала от ОПА На фиг.5, в качестве примера, представлены спектрограммы сигналов от ОПА, зарегистрированные на спектроанализаторе ВЧ-сигнала при отсутствии МО (фиг.5а) и при наличии МО – ОПА (фиг.5б), а также спектрограмма сигналов, зарегистрированная на выходе спектроанализатора НЧ-сигнала в диапазоне частот 0-20 Гц (фиг.5в). Как видно из фиг.5б, при наличии МО (ОПА) в спектре ВЧ-сигнала накачки со модуляционные частоты На фиг.6а и фиг.6в иллюстрируются вертикальные распределения скорости звука (С, м/с) с глубиной (Н) в неоднородной морской среде, а также соответствующие им осциллограммы ВЧ-сигнала 48 кГц, излученные в импульсном режиме с поверхности моря в сторону дна. Как видно из фиг.6б, г, в данном географическом районе, но в разное время суток имеются: один ППС – с осью на горизонте 140-160 м (фиг.6а, б) или несколько ГПС – в толще воды на глубине 160-210 м (фиг.6в, г). На фиг.7 иллюстрируется внешний вид отдельных блоков, реализующих разработанный способ обеспечения безопасности мореплавания судов с большой осадкой и водоизмещением. I. Увеличение дальности действия способа было достигнуто за счет: 1. Повышением акустической чувствительности путем увеличения эффективности преобразования акустической энергии ВЧ-волн накачки в акустическую энергию ВЧ-волн комбинационных частот путем излучения ВЧ-сигнала накачки на частоте, близкой к резонансной частоте рассеивателей звука доминирующих в соответствующей области взаимодействия волн. 2. Многоканальной пространственной обработки модуляционного процесса и последующего суммирования НЧ-полезного сигнала по каждой из ХН. 3. Многоканальной частотной обработки модуляционного процесса и последующего суммирования НЧ-полезного сигнала по каждому частотному каналу в данном пространственном канале и др. II. Возможность применения на повышенных (более 10-12 узл., или более 20 км/ч) скоростях хода носителя достигнута за счет того, что: 1. Повышена акустическая чувствительность способа путем увеличения эффективности преобразования акустической энергии ВЧ-волн накачки в акустическую энергию ВЧ-волн комбинационных частот. 2. Использована многоканальная пространственная обработка модуляционного процесса и последующее суммирование НЧ-полезного сигнала. 3. Использована многоканальная частотная обработка модуляционного процесса и последующее суммирование НЧ-полезного сигнала и др. III. Повышение достоверности идентификации (классификации) обнаруженных МО достигнута за счет: 1. Увеличения эффективности преобразования акустической энергии ВЧ-волн накачки в акустическую энергию ВЧ-волн комбинационных частот. 2. Использования информации, содержащейся в формах спектров ВЧ-комбинационных частот и НЧ-полезного сигнала, а также в частотных поддиапазонах НЧ-полезного сигнала. 3. Использования, в основном, информации о водных акустических лучах (не выходящих на поверхность моря) принятых п приемниками, расположеными в диаметральной плоскости по носу СБОВ, а также в его левом и в его правом носовых секторах (курсовых углах). 4. Использования информации о величине изменения пеленга (ВИП) за выбранную единицу времени (например, за 1 мин.). 5. Использования эффекта Доплера и т.д. IV. Упрощение процесса обнаружения МО, находящихся на носовых курсовых углах, достигнуто применением n излучателей ВЧ-сигнала накачки и n приемников ВЧ-сигнала накачки, расположенных в диаметральной плоскости по носу СБОВ, а также в его левом и правом носовых секторах. V. Повышение точности оценки пространственных координат обнаруженных МО достигнуто за счет того, что: 1. Сокращен сектор наблюдения ( с 360° до 120°). 2. n излучателей ВЧ-сигнала накачки, а также n приемников ВЧ-сигнала накачки были расположены в диаметральной плоскости по носу СБОВ, а также в его левом и правом носовых секторах 3. n приемников ВЧ-сигнала накачки были ориентированы в вертикальной плоскости, в основном, для приема водных акустических лучей. 4. Использовалась многоканальная частотная обработка модуляционного процесса. При этом ХН имели (на основной частоте ВЧ-сигнала накачки и ее высших гармониках) разную ширину основного максимума ХН. 5. Была повышена разрешающая способность по направлению и точность пеленгования объектов за счет более высокого соотношения сигнал/помеха, которое достигалось: – повышением эффективности преобразования акустической энергии ВЧ-волн накачки в акустическую энергию ВЧ-волн комбинационных частот; – суммированием НЧ-полезного сигнала по каждому пространственному каналу (по каждой ХН); – суммированием НЧ-полезного сигнала по каждому частотному каналу и др. Литература 1. Роберт Дж. Урик Основы гидроакустики. – Л.: Судостроение, 1978, 445 с. 2. Патент США №3882444. кл. G01S 9/66, 1975. 3. Бахарев С.А. Патент РФ №2215304 по заявке №2002102298 от 25.01.02 г. 4. Бахарев С.А. и др. Исследования влияния гидрофизических параметров морской среды на акустическое поле в морской шельфовой зоне. Отчет о НИР «Акватория». – Минрыбхоз. – Владивосток. – Дальрыбвтуз, 1998, 167 с.
Формула изобретения
Способ обеспечения безопасности мореплавания судов с большой осадкой и водоизмещением, заключающийся в формировании, усилении и излучении высокочастотного сигнала накачки в водную среду на n частотах с помощью n излучателей, расположенных на корпусе носителя, при этом базовая частота высокочастотного сигнала накачки соответствует резонансной частоте рассеивателей звука, доминирующих в области взаимодействия акустических волн, рассеянный и промодулированный по амплитуде низкочастотным полезным сигналом высокочастотный сигнал накачки принимается с помощью n приемников, расположенных на корпусе носителя, при этом направленность по приему формируется за счет волновых размеров каждого из n приемников и соответствующей ему частоты высокочастотного сигнала накачки, из принятого высокочастотного сигнала накачки выделяется низкочастотный полезный сигнал, а определение направления на его источник осуществляется по максимальному значению низкочастотного полезного сигнала путем последовательного подключения к решающему устройству каждого из n приемников, отличающийся тем, что в качестве носителя используется судно с большой осадкой и водоизмещением, n излучатели и n приемники расположены под водой попарно в его носовой части, а также в левом и правом носовых секторах и образуют общий сектор наблюдения, n приемники ориентированы, в основном, для приема акустических лучей, не выходящих на поверхность моря, в качестве n частот используется базовая частота
РИСУНКИ
|
||||||||||||||||||||||||||
 и ее высшие гармоники, при этом базовая частота соответствует резонансной частоте
и ее высшие гармоники, при этом базовая частота соответствует резонансной частоте  i (
i (  – при использовании базовой частоты ВЧ-сигнала накачки
– при использовании базовой частоты ВЧ-сигнала накачки