Патент на изобретение №2341805
|
||||||||||||||||||||||||||
(54) КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР
(57) Реферат:
Изобретение относится к измерительной технике и предназначено для измерения ускорений в системе управления движением реактивного снаряда системы залпового огня. Компенсационный акселерометр содержит инерционный элемент (1), колебательную систему (2), преобразователь перемещения (3), усилитель цепи уравновешивания (4), обратный преобразователь (5), узел подключения масштабирующего резистора (6), термокомпенсирующий усилитель (7). Оконечный усилитель цепи прямого преобразования (4) содержит операционный усилитель DА1, инвертирующий вход которого подключен к электрическому соединению резисторов R1, R2, а выход – к обратному преобразователю (5), содержащему обмотку с электрическим сопротивлением г и паразитными индуктивностью L и емкостью С1 и узлом подключения масштабирующего резистора (6), состоящим из резистора RM, соединительных проводников rj и параллельно подключенного к ним корректирующего конденсатора Cдоп. Точка соединения узлов (5) и (6) подключена к термокомпенсирующему усилителю (7), содержащему операционный усилитель DA2, цепь его отрицательной обратной связи в виде резистора R3 и цепи, содержащей последовательный регулирующий резистор RП и параллельное соединение катушки датчика температуры R0(T) и шунтирующего резистора RШ. Техническим результатом является повышение временной стабильности. 4 ил.
Изобретение относится к измерительной технике и может быть использовано для прецизионного измерения ускорений в системах коррекции дальности полета реактивных снарядов. Известен компенсационный акселерометр [1], содержащий инерционный элемент, механическую колебательную систему, преобразователь перемещения в электрический сигнал, подключенный через предварительный усилитель к оконечному усилителю цепи прямого преобразования, выход которого соединен с первой обмоткой обратного преобразователя, и канал демпфирования, содержащий подключенный к выходу предварительного усилителя дифференцирующий усилитель и вторую обмотку обратного преобразователя канала демпфирования, усилитель постоянного тока, вход которого подключен к выходу дифференцирующего усилителя, дополнительный усилитель постоянного тока, вход которого подключен к выходу дифференцирующего усилителя, а выход к второй обмотке обратного преобразователя канала демпфирования. Недостатком акселерометра является сложность конструкции чувствительного элемента из-за необходимости выполнения и подключения к выходу усилителя демпфирующей обмотки, а также уменьшение эффективности преобразования электрического тока в уравновешивающую силу. Последний недостаток приводит либо к увеличению тока компенсации, либо к уменьшению верхней границы диапазона измерений. Другими недостатками акселерометра являются сложность регулирования динамических характеристик и усложнение схемы акселерометра, связанное с введением к нее двух дополнительных усилителей. Известен акселерометр [2], содержащий корпус, установленную на нем первую пластину, имеющую внешнюю подвижную часть, внутреннюю неподвижную часть и соединяющие их две упругие перемычки, оси изгиба которых образуют ось упругого шарнира, дифференциальный емкостный преобразователь положения, магнитоэлектрический силовой преобразователь с магнитом дисковой формы на корпусе и кольцевой компенсационной катушкой, груз, усилитель, газовый демпфер, характеристики которого изменяются путем изменения давления во внутренней полости акселерометра. Недостатком указанного акселерометра является значительная сложность регулирования давления в полости акселерометра с целью достижения заданных динамических характеристик и виброустойчивости. Известен акселерометр [3], содержащий чувствительный элемент, датчик положения, магнитоэлектрический силовой преобразователь с постоянным магнитом и компенсационной катушкой, первый вывод которой подсоединен к выходу усилителя, соединенные последовательно своими первыми выводами первый и второй масштабирующие резисторы, логическое устройство, управляющее работой реле, контакты которого в зависимости от значения измеряемого ускорения замыкают или размыкают один из масштабирующих резисторов, изменяя тем самым коэффициент преобразования акселерометра. Существенным недостатком этого устройства является неудовлетворительная временная стабильность выходного сигнала вследствие увеличения разрешающей способности за счет уменьшения глубины уравновешивания. Кроме того, при протекании тока, пропорционального измеряемому ускорению, по масштабирующим резисторам, контактам реле и электрическим проводникам, соединяющим указанные элементы из-за различия сечений и материалов, из которых выполнены проводники, контакты реле и выводы масштабирующих резисторов, возникают термо-ЭДС и эффект Пельтье [4], увеличивающие нелинейность функции преобразования и способствующие увеличению нестабильности выходного сигнала и акселерометра по мере возрастания измеряемого ускорения. Общим недостатком рассмотренных устройств является значительная систематическая составляющая температурной погрешности из-за изменения индукции в зазоре магнитной системы магнитоэлектрического преобразователя. В свою очередь нестабильность выходного сигнала ограничивает возможности улучшения метрологических характеристик акселерометра за счет ухудшения качества введения поправок в результат измерений на систематическое влияние различных эксплуатационных факторов. Наиболее близким техническим решением к заявляемому является компенсационный акселерометр [5], содержащий инерционный элемент, механическую колебательную систему, датчик перемещения, обратный преобразователь, оконечный усилитель, выход которого соединен с последовательным соединением зашунтированной конденсатором обмотки обратного преобразователя и масштабирующего резистора, резистор цепи отрицательной обратной связи усилителя, один вывод которого подключен к его инвертирующему входу, а другой вывод к точке соединения обмотки обратного преобразователя и сигнального вывода масштабирующего резистора. Существенными недостатками прототипа являются ограниченные возможности по формированию требуемых динамических характеристик и виброустойчивости из-за низкой устойчивости оконечного усилителя тока вследствие включения в цепь его прямого преобразования или цепь от преобразователя перемещения датчика до точки соединения обмотки и масштабирующего резистора, катушки обратного преобразователя с паразитными параметрами в виде активного сопротивления, корректирующей емкости и неучтенной в нем индуктивности, образующих высокочастотный колебательный контур. Указанное включение способствует появлению на выходе оконечного усилителя высокочастотной генерации значительной амплитуды, приводящей к потере работоспособности как самого усилителя, так и акселерометра в целом. Действительно, уточненная передаточная функция (ПФ) усилителя цепи уравновешивания устройства – прототипа W(p), определенная из [6] с учетом приведенной в нем формулы (7.14) и информации, представленной в таблицах I и III приложения, равна
Выражение (1) получено с учетом следующих допущений, обоснованных в [6]: 1) операционный усилитель имеет ПФ вида А/ 2) схема электрическая усилителя цепи уравновешивания устройства-прототипа, приведенная в его описании, классифицируется как параллельный преобразователь «напряжение ток»; 3) с целью обеспечения высокой глубины уравновешивания в нем реализовано условие R2>>R1, R2>>R3; 4) ПФ полного сопротивления катушки обратного преобразователя Z(p) с учетом паразитных индуктивностей L, емкости С и активного сопротивления r равна Судя по виду характеристического уравнения (знаменателю) выражения (1), оно имеет относительно оператора р третий порядок, что соответствует неустойчивому состоянию усилителя, наблюдаемому в действительности. Для обеспечения устойчивой работы усилителя необходимо в соответствии с рекомендациями [7] снизить порядок характеристического уравнения, например подключением корректирующего конденсатора Ск параллельно резистору R2. В этом случае ПФ усилителя станет равной
Из выражения (2) видно, что введение сомножителя ( Проявление эффекта усиливается при увеличении диапазона измерений, связанном с уменьшением сопротивления масштабирующего резистора. Целями предлагаемого изобретения являются повышение стабильности метрологических характеристик, уменьшение систематической составляющей температурной погрешности акселерометра, обеспечение заданных динамических характеристик и виброустойчивости. Поставленная цель достигается тем, что компенсационный акселерометр, содержащий инерционный элемент, колебательную систему, датчик перемещения, усилитель цепи уравновешивания, выход которого соединен с последовательно соединенными обмоткой обратного преобразователя и масштабирующим резистором, резистор цепи отрицательной обратной связи усилителя, один вывод которого подключен к его инвертирующему входу, снабжен дополнительными усилителем, резистором его обратной связи и подключенной к его инвертирующему входу цепью, содержащей параллельное включение медной обмотки датчика температуры и шунтирующего ее резистора RШ, соединенной последовательно с резистором RП, а также дополнительным конденсатором СДОП, подключенным параллельно к масштабирующему резистору, а свободный вывод резистора отрицательной обратной связи усилителя цепи уравновешивания подключен к его выходу, полное электрическое сопротивление
где R0 – электрическое сопротивление медной катушки при температуре, соответствующей середине температурного интервала;
n – установленное отношение температурных приращений сопротивлений RП и R0 (n>1);
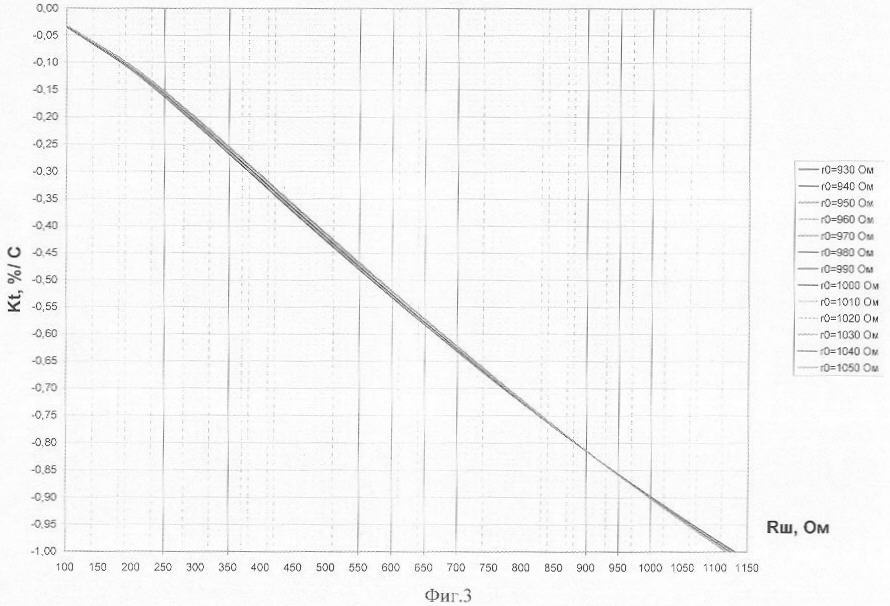
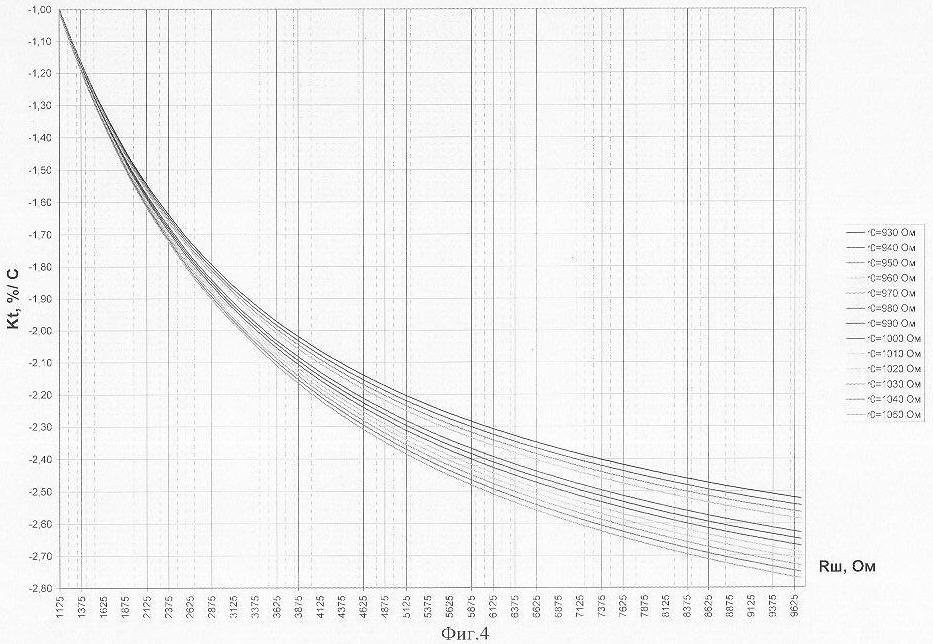
D, На фиг.1 показана схема предлагаемого компенсационного акселерометра, где 1 – инерционный элемент, 2 – колебательная система, 3 – преобразователь перемещения, 4 – усилитель цепи уравновешивания, 5 – обратный преобразователь, 6 – узел подключения масштабирующего резистора, 7 – термокомпенсирующий усилитель. На фиг.2 представлена принципиальная электрическая схема включения оконечного усилителя цепи прямого преобразования 4, содержащего операционный усилитель DA1, инвертирующий вход которого подключен к электрическому соединению резисторов R1, R2, а выход – к обратному преобразователю 5, содержащему обмотку с электрическим сопротивлением r и паразитными индуктивностью L и емкостью С1 и узлом подключения масштабирующего резистора 6, состоящим из резистора RM, соединительных проводников rj и параллельно подключенного к ним корректирующего конденсатора Сдоп. Точка соединения узлов 5 и 6 подключена к термокомпенсирующему усилителю 7, содержащему операционный усилитель DA2, цепь его отрицательной обратной связи в виде резистора R3 и цепи, содержащей последовательный регулирующий резистор RП и параллельное соединение катушки датчика температуры R0(T) и шунтирующего резистора RШ. На фиг.3, 4 показаны номограммы, представляющие собой графическое отображение математического описания поведения термокомпенсирующего усилителя и позволяющие определить электрические сопротивления резисторов, обеспечивающих требуемую компенсацию температурной погрешности акселерометра. Акселерометр работает следующим образом. При воздействии ускорения на инерционный элемент, частью которого является катушка обратного преобразователя, возникает сила, преобразуемая колебательной системой в перемещение и датчиком перемещения в электрический сигнал. Этот сигнал усиливается в предварительном усилителе и с его выхода подается на оконечный усилитель цепи прямого преобразования 1 акселерометра, на выходе которого включена обмотка обратного преобразователя 2. Выходной сигнал оконечного усилителя вызывает протекание тока по обмотке 2, узлу 3 в виде масштабирующего резистора 3 и подключенному к нему параллельному конденсатору в случае, если измеряемое ускорение изменяется по частоте, или на вход акселерометра действует также вибрационное ускорение. Взаимодействие токов с полем постоянного магнита приводит к возникновению сил, стремящихся возвратить инерционный элемент в исходное состояние. В соответствии с принципом действия акселерометра и его узлов 1, 2, 3 ток iк(р)ток, протекающий с выхода цепи прямого преобразования 1 по обратному преобразователю 2 и цепям подключения масштабирующего резистора г, пропорционален измеряемому ускорению. Уменьшение электрических сопротивлений проводников rj до установленного уровня приводит к тому, что влияние их перегрева, изменяющиеся в зависимости от измеряемого ускорения током iк(р), на изменение электрических сопротивлений и значения термо-ЭДС, возникающих в точках а-а’, в-в’, с-с’, становится пренебрежительно малым, приводя к существенному уменьшению нестабильности выходного сигнала акселерометра в точке электрического соединения узлов 2 и 3 фиг.1. Имеющее систематический характер влияние изменения тока компенсации iк(р), вызванное нестабильностью индукции в зазоре магнитоэлектрического преобразователя при изменении температуры окружающей среды, уменьшается за счет введения в предлагаемый акселерометр узла 4 фиг.1, содержащего операционный усилитель ДА2, резистор его обратной связи R3 и термозависимую цепь, состоящую из последовательного регулирующего резистора RП и параллельно включенных медной обмотки датчика температуры с номинальным сопротивлением R0 и регулирующего резистора RШ. Тип примененного датчика температуры не имеет принципиального значения, если временная стабильность его метрологических характеристик и линейность функции преобразования не уступают аналогичным параметрам датчика из медного провода. В соответствии с электрической схемой узла 4 значение компенсируемой погрешности Kt в интервале от изменения температуры окружающей среды от минус
Условие выбора электрического сопротивления резистора RП может быть получено из анализа варианта исполнения узла 4 без резистора RШ, показывающего, что схема прекращает выполнять свои функции в том случае, когда температурные приращения сопротивлений резистора
Необходимость ограничения тока через датчик температуры, сохранения эффективности и точности процесса термокомпенсации не позволяет проводить дальнейшие изменения резистора RП, значению которого соответствует фиксированная величина Кt, доведение которой до требуемого обеспечивается плавным изменением электрического сопротивления резистора RШ. Из-за сложности аналитического определения функции RШ=f(Kt) из выражения (3) требуемое значение резистора RШ определяют по графикам, полученным путем моделирования на ЭВМ и представленным на фиг.2, фиг.3. Из них видно, что пределы компенсируемой температурной погрешности для различных значений RШ и при фиксированном значении RП колеблются в пределах от 0,04 до 2%/100°С, позволяющих решать реальные задачи термокомпенсации. Процедура термокомпенсации состоит из двух этапов. На первом этапе экспериментально определяется температурная погрешность акселерометра K Формирование заданных динамических характеристик и виброустойчивость акселерометра обеспечены путем выведения обратного преобразователя 2 из состава узла 1 фиг.1, а также введением в узел 3 дополнительного конденсатора Сдоп. При этом усилитель узла 1 приобретает абсолютную устойчивость за счет изменения порядка, описывающего его работу дифференциального уравнения и отделения от его выхода низкоомной резистивной RM и емкостной нагрузок Сдоп. Действительно в этом случае предлагаемая структура построения усилителя цепи уравновешивания классифицируется в соответствии с [6] как инвертор напряжения, ПФ которого равна
Анализируя выражение (4), видим, что его характеристическое уравнение имеет первый порядок, свойственный абсолютно устойчивым системам, не требующим никаких мер по обеспечению повышения запасов устойчивости при сколь угодном увеличении отношения R2/R1. Кроме того, усилитель является практически безынерционным звеном, обеспечивающим широкие возможности формирования заданных динамических характеристик и виброустойчивости. В то же время указанный контур не оказывает значимого влияния на устойчивость низкочастотной цепи уравновешивания акселерометра, включающей в себя узлы 1, 2 и 3 фиг.1. Вследствие этого предложенные решения обеспечивают выполнение принципов реализации структуры построения низкочастотного виброустойчивого акселерометра. Одновременно обеспечиваются также широкие возможности по формированию динамических характеристик компенсационного акселерометра, собственная частота Таким образом, предлагаемое решение по обеспечению временной стабильности позволяет с высокой точностью скомпенсировать погрешность акселерометра в условиях воздействия изменений температуры окружающей среды, а уменьшение инерционности оконечного усилителя цепи прямого преобразования позволяет не только увеличить точность акселерометра за счет повышения глубины уравновешивания, но и обеспечивает широкие возможности формирования заданных динамических характеристик и повышение виброустойчивости. Эффективность предлагаемых решений подтверждена разработками, серийным выпуском акселерометров в ФГУП “НИИ физических измерений” и результатами натурных испытаний. Источники информации 1. А.с. СССР № 1775671, МКИ5 G01Р 15/08. Компенсационный акселерометр / А.А.Папко, В.Н.Колганов, С.Н.Вяткин, Т.И.Балашова. – №4916740/10; заявл. 05.03.91; опубл. 15.11.92, Бюл. №42. – 3 с.: ил. 2. Пат. РФ №2193209, МПК7, G01Р 15/13. Компенсационный акселерометр / Баженов В.И., Будкин В.П., Вдовенко И.В., Джанджгава Г.И., Рязанов В.А., Соловьев; заявитель и патентообладатель Открытое акционерное общество “Раменское приборостроительное конструкторское бюро”. – №2001123261/28; заявл. 21.08.01; опубл. 20.11.02. 3. Пат. РФ №2155965, МПК7, G01Р 15/13. Компенсационный акселерометр / Баженов В.И., Бражник В.М., Краснов В.В.; заявитель и патентообладатель Открытое акционерное общество “Раменское приборостроительное конструкторское бюро”. №99115633/28; заявл. 19.07.99; опубл. 10.09.00. 5. Пат. РФ №2138822, МПК6, G01Р 15/08. Компенсационный акселерометр / Колганов В.Н., Папко А.А., Малкин Ю.М.; заявитель и патентообладатель Научно-исследовательский институт физических измерений. №97108268/28; заявл. 20.05.97; опубл. 27.09.99, Бюл. №27, 4 с.: ил. 6. Достал И. Операционные усилители. М.: Мир, 1982, 512 с. 7. Бесекерский В. А., Попов Е. П. Теория систем автоматического регулирования. М.: Наука, 1975, 767 с.
Формула изобретения
Компенсационный акселерометр, содержащий инерционный элемент, колебательную систему, датчик перемещения, усилитель цепи уравновешивания, выход которого соединен с последовательно соединенными обмоткой обратного преобразователя и масштабирующим резистором, резистор цепи отрицательной обратной связи усилителя, один вывод которого подключен к его инвертирующему входу, отличающийся тем, что он снабжен дополнительными усилителем, резистором его обратной связи и подключенной к его инвертирующему входу цепью, содержащей параллельное включение медной обмотки датчика температуры и шунтирующего ее резистора RШ, соединенной последовательно с резистором RП, а также дополнительным конденсатором Cдоп, подключенным параллельно к масштабирующему резистору, а свободный вывод резистора отрицательной обратной связи усилителя цепи уравновешивания подключен к его выходу, полное, электрическое сопротивление
где R0 – электрическое сопротивление медной катушки при температуре, соответствующей середине температурного интервала;
n – установленное отношение температурных приращений сопротивлений RП и R0 (n>1);
D,
РИСУНКИ
PD4A – Изменение наименования обладателя патента СССР или патента Российской Федерации на изобретение
(73) Новое наименование патентообладателя:
Адрес для переписки:
Извещение опубликовано: 27.07.2009 БИ: 21/2009
|
||||||||||||||||||||||||||

 р+1, где А – коэффициент усиления микросхемы усилителя,
р+1, где А – коэффициент усиления микросхемы усилителя,  (см. узел 2 на фиг.1)
(см. узел 2 на фиг.1)
 цепей подключения масштабирующего резистора RM выбирается из условия
цепей подключения масштабирующего резистора RM выбирается из условия  а электрическое сопротивление резисторов RП, RШ и емкости конденсатора Сдоп. определяются из выражений
а электрическое сопротивление резисторов RП, RШ и емкости конденсатора Сдоп. определяются из выражений
 – назначенное значение составной части общей погрешности;
– назначенное значение составной части общей погрешности; M,
M,  Т – приращение температур относительно середины интервала температуры, воздействующей на акселерометр;
Т – приращение температур относительно середины интервала температуры, воздействующей на акселерометр; 0 – заданные значения относительного коэффициента демпфирования и собственной частоты акселерометра.
0 – заданные значения относительного коэффициента демпфирования и собственной частоты акселерометра.
 . Если K
. Если K
 цепей подключения масштабирующего резистора RM выбирается из условия
цепей подключения масштабирующего резистора RM выбирается из условия  а электрическое сопротивление резисторов RП, RШ и емкости конденсатора Сдоп определяются из выражений
а электрическое сопротивление резисторов RП, RШ и емкости конденсатора Сдоп определяются из выражений