Патент на изобретение №2339966
|
||||||||||||||||||||||||||
(54) СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ
(57) Реферат:
Изобретение относится к способам пассивной радиолокации источников радиоизлучения (ИРИ) с помощью пассивного локатора (ПЛ), размещенного на носителе. Сущность изобретения состоит в том, что при формировании на интервале синтезирования квадратурных составляющих огибающей сигнала ИРИ, на основе которых определяется местоположение ИРИ, выбор интервала синтезирования осуществляют исходя из интервала, на котором сохраняется когерентность сигнала ИРИ (или его отдельных спектральных составляющих) и опорного сигнала, и при этом сохраняют фазовые соотношения сигнала ИРИ и опорного сигнала на всем интервале синтезирования. Для обеспечения указанной когерентности определяют текущий спектр сигнала ИРИ и выделяют спектральную составляющую, интенсивность которой существенно превышает спектральный уровень шумов, а интервал синтезирования согласовывают со временем существования этой составляющей. Достигаемый технический результат – увеличение точности определения координат ИРИ. По аналогии с активной локацией это может рассматриваться как способ синтезирования пассивной антенной системы (СПАС) со значительным увеличением при этом точности определения координат. 6 з.п. ф-лы, 5 ил.
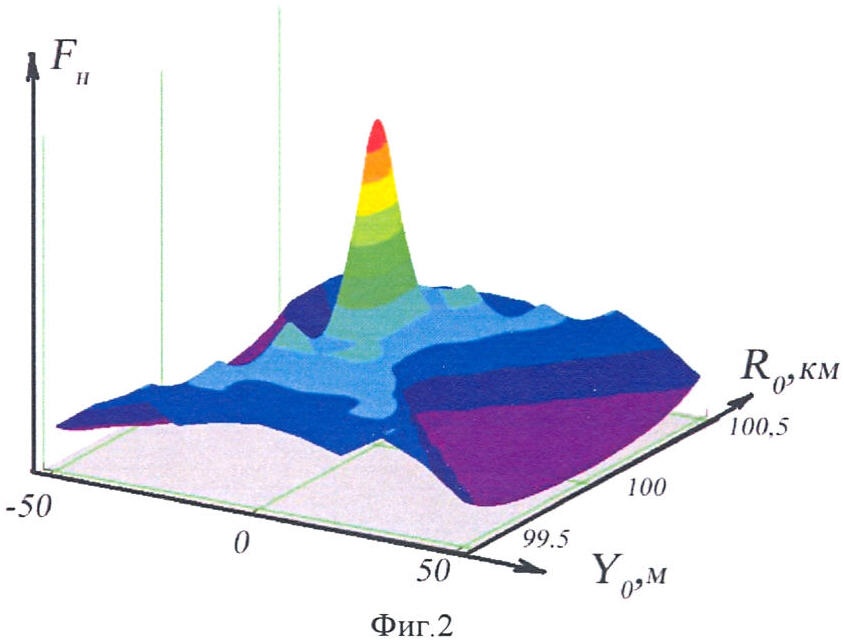
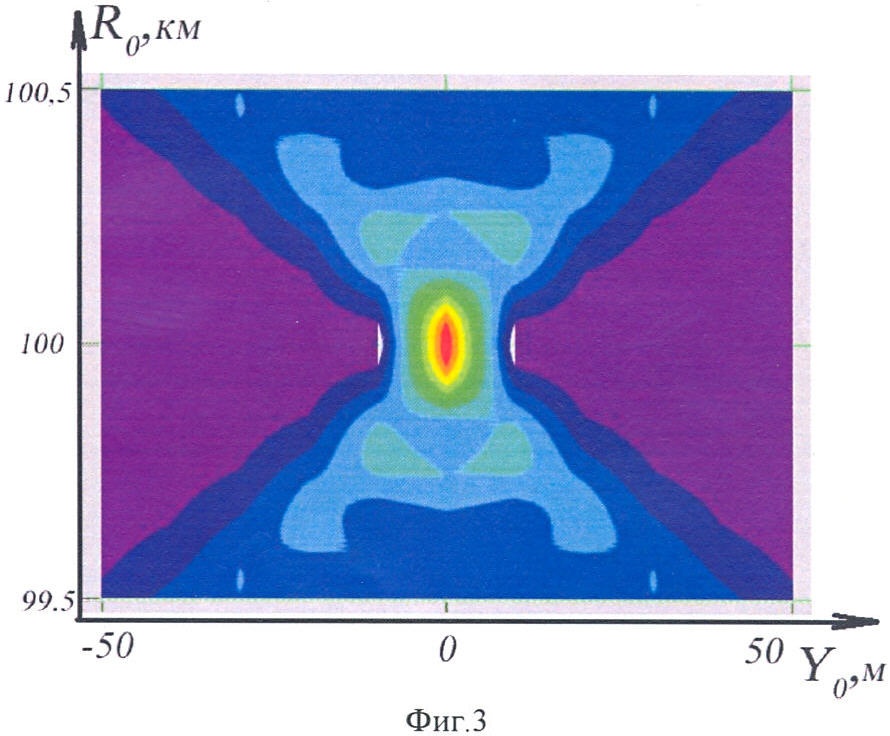
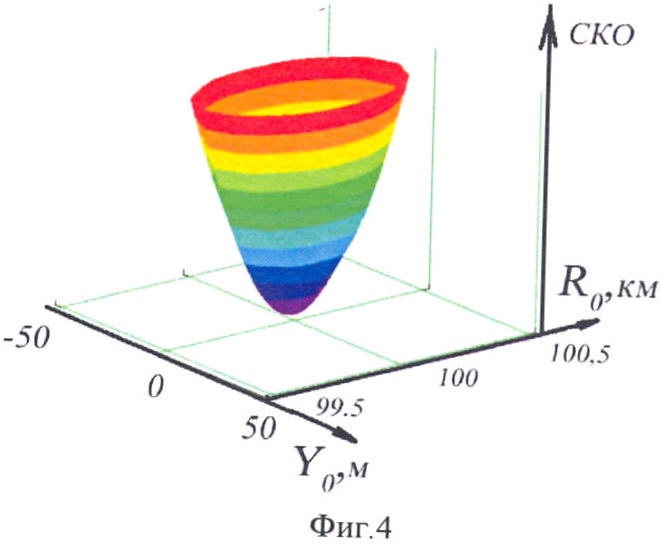
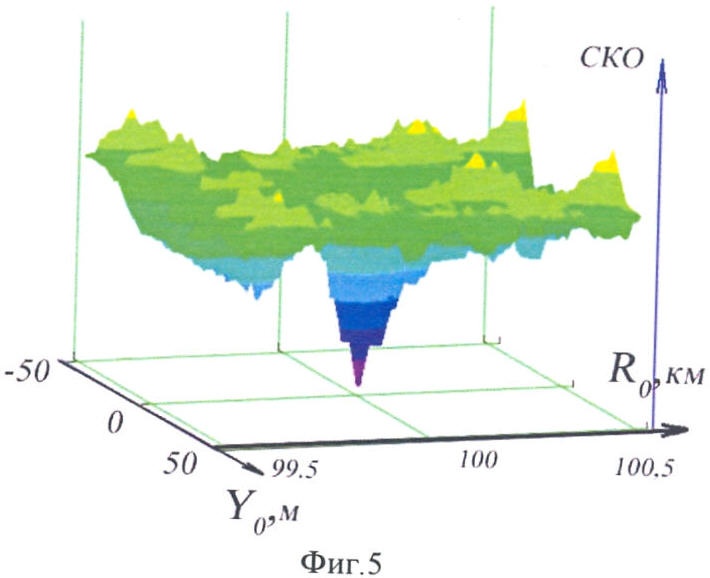
Изобретение относится к способам пассивной радиолокации источников радиоизлучения (ИРИ) и может быть использовано для определения местоположения ИРИ с помощью пассивного локатора (ПЛ), размещенного на носителе ПЛ и осуществляющего локацию при движении носителя на некотором интервале дальности – интервале синтезирования Dсинт, в пределах которого сигнал ИРИ или его некоторые спектральные составляющие сохраняют свою когерентность. Для определения местоположения ИРИ используют, в частности, многопозиционные системы из Nпоз ПЛ, каждый из которых имеет в своем составе NАПМ антенно-приемных модулей (АПМ), образующих узкобазовую систему пассивной локации. При этом под узкобазовыми системами (УБС) понимаются многоканальные системы пеленгации, пространственное разнесение антенн которых соизмеримо с длиной волны Вместо Nпоз, разнесенных на местности, может быть использован один ПЛ, установленный на подвижном носителе, например, на летательном аппарате (ЛА). Во время движения носителя на некотором интервале дальности – интервале синтезирования проводят неоднократный прием сигнала ИРИ и оценку направления на него. На каждом такте оценки пеленга положение носителя должно быть известно. В этом случае переход от многопозиционной пассивной системы к одному ПЛ, но осуществляющего многократный прием и оценку пеленга при разных положениях его в пространстве, принципиально не меняет существо способа (см., например, статью А.В.Дубровина и Ю.Г.Сосулина «Одноэтапное оценивание местоположения источника радиоизлучения пассивной системой, состоящей из узкобазовых подсистем» в журнале «Радиотехника и электроника» №4 за 2004 г.). Эти способы определения координат могут служить аналогами предлагаемого способа. Ошибки определения пеленга ИРИ и его координат зависят от соотношения максимального размера антенной системы УБС (ее базы D) и длины волны Увеличение базы антенной системы выше некоторой максимально допустимой для каждого конкретного ПЛ величины приводит, в общем случае, к неоднозначности в определении как направления на ИРИ, так и его местоположения. В частности, для ПЛ в виде двухэлементного интерферометра однозначность обеспечивается только при базе D<0.5 При установке ПЛ на ЛА и использовании для определения местоположения ИРИ некоторого интервала синтезирования точность определения координат ИРИ увеличивают за счет установки дополнительной вынесенной позиции (ВП), размещаемой на самом ЛА или на буксируемой этим ЛА платформе (см. «Способ определения координат источника радиоизлучения», заявка на патент №2005122732/09 от 18.07.05). Однако и в этом случае основное влияние на точность имеет база ПЛ, а она ограничена размерами ЛА (буксировочного троса) и существенно меньше всего интервала синтезирования Dсинт. В качестве прототипа предлагаемого способа может быть взят способ, описанный в статье А.В.Дубровина и Ю.Г.Сосулина «Одноэтапное оценивание местоположения источника радиоизлучения пассивной системой, состоящей из узкобазовых подсистем» (журнал «Радиотехника и электроника» №4 за 2004 г.). Согласно указанному способу сигнал ИРИ принимают на АПМ УБС, где его усиливают и селектируют (фильтруют) в выбранном диапазоне частот. По выходу АПМ сигнал ИРИ обнаруживает и определяет его несущую частоту. При движении носителя ПЛ в каждом АПМ проводят формирование квадратурных составляющих огибающих сигналов ИРИ (комплексных огибающих). На интервале оценки местоположения ИРИ (на интервале синтезирования) осуществляют неоднократное измерение (оценку) и запоминание квадратурных составляющих на выходах АПМ, занося эти измерения в массив данных, получаемых на интервале синтезирования. Для образования квадратурных составляющих используют сигнал единого для всех АПМ опорного генератора. При этом требования к стабильности опорного сигнала по частоте невысокие. Это связано с тем, что формирование квадратурных составляющих осуществляют с помощью сигнала опорного генератора с точностью до соотношения фаз сигналов разных АПМ на каждом такте приема сигнала ИРИ. При этом начальная фаза опорного сигнала на каждом такте приема сигнала ИРИ не имеет значения, так как в дальнейшем используют только различие между сигналами ИРИ разных АПМ на этом такте. Это так называемые системы с кратковременной пространственной когерентностью (см. книгу П.А.Бакулева «Радиолокационные системы», М., Радиотехника, 204 г.). Одновременно на каждом такте оценки квадратурных составляющих сигналов фиксируют и также заносят в массив данных момент этой оценки и положения фазовых центров приемных антенн АПМ в пространстве на момент этой оценки. Исходя из данных, полученных на интервале синтезирования, определяют местоположение ИРИ. Это может быть сделано, например, путем построения функции правдоподобия для оценок квадратурных составляющих огибающих, измеренных на интервале синтезирования, и нахождения ее глобального максимума, координаты которого и определяют местоположение ИРИ. Хотя этот способ, называемый одноэтапным способом определения координат ИРИ, при малых соотношениях сигнал/шум несколько превышает по точности определения координат двухэтапный способ (см. указанную ранее статью А.В.Дубровина и Ю.Г.Сосулина), тем не менее, потенциальная точность даже одноэтапного способа определения координат относительно невелика. Главная причина при этом заключается в том, что в этих способах используется оценка квадратурных составляющих сигнала ИРИ разных АПМ относительно друг друга (или сигнала опорного генератора) на каждом такте этой оценки без учета изменения их фаз на интервале синтезирования. В конечном итоге, используется только разность фаз между сигналами разных АПМ и, соответственно, точность определяется базой ПЛ, и при этом сохраняются ограничения на базу, характерные для УБС пассивной локации. Задачей предлагаемого способа является повышение точности определения координат ИРИ, сигналы которых или их отдельные спектральные составляющие могут быть представлены на интервале синтезирования как узкополосные сигналы, получаемые, например, при модуляции несущей частоты f0 сигнала ИРИ некоторым узкополосным (относительно несущей) информационным сигналом. Сущность изобретения состоит в том, что в способе определения координат источника радиоизлучения (ИРИ), включающем прием сигнала ИРИ пассивным локатором (ПЛ), установленным на движущемся носителе, обнаружение сигнала ИРИ, определение его несущей частоты, формирование на носителе опорного сигнала с последующим формированием с использованием этого опорного сигнала квадратурных составляющих огибающих сигналов ИРИ на выходах антенно-приемных модулей (АПМ) ПЛ, неоднократное измерение во время движения носителя на выбранном интервале синтезирования этих квадратурных составляющих и их запоминание с одновременным запоминанием времени каждого измерения и пространственных координат фазовых центров приемных антенн АПМ на момент измерения с последующим нахождением, например, с помощью метода максимального правдоподобия, местоположения ИРИ на основе данных, полученных на интервале синтезирования, интервал синтезирования выбирают, исходя из требуемой точности определения местоположения ИРИ и из интервала, на котором сохраняется когерентность сигнала ИРИ или его отдельных спектральных составляющих и опорного сигнала, и при формировании квадратурных составляющих сохраняют фазовые соотношения сигнала ИРИ и опорного сигнала на всем интервале синтезирования. Кроме того, при изложенном способе определения координат количество АПМ ПЛ – NАПМ выбирают из условия NАПМ При этом для обеспечения указанной когерентности сигнала (или его спектральной составляющей) при обнаружении сигнала ИРИ определяют его текущий спектр за интервал времени Тсп, выделяют спектральную составляющую, интенсивность которой существенно превышает спектральный уровень шумов на некотором участке интервала наблюдения Тнабл, причем Тнабл>>Тсп, согласовывают протяженность интервала синтезирования с этим участком, отфильтровывают на интервале синтезирования выбранную спектральную составляющую спектра сигнала ИРИ в полосе, согласованной с 1/Тсп, и на основании отфильтрованного сигнала с помощью опорного сигнала многократно оценивают на интервале синтезирования квадратурные составляющие огибающей выбранной спектральной составляющей сигнала ИРИ, которые и используются для определения местоположения ИРИ, при этом Тсп выбирают из условия, что При оптимальном (квазиоптимальном) решении местоположение ИРИ определяют, например, путем нахождения положения точки глобального максимума двумерной обобщенной корреляционной функции (ОКФ), построенной по данным, полученным на интервале синтезирования, например, в декартовой системе координат относительно параметров R0 и Y0, где R0 – удаленность ИРИ от оси Y, определяемой вектором движения носителя на начало интервала синтезирования, а Y0 – смещение носителя на начало синтезирования относительно основания перпендикуляра, опущенного из точки нахождения ИРИ на ось Y. Определенное таким образом местоположение ИРИ (положение глобального максимума ОКФ) R0оц и Y0оц может быть пересчитано в любую другую систему координат. Для упрощения алгоритма и уменьшения объема вычислений при каждом i-м измерении квадратурных составляющих огибающих сигнала ИРИ оценивают фазы этих сигналов Кроме того, при нахождении нескольких точек предполагаемого местоположения ИРИ для всех этих точек определяют значения ОКФ и в качестве местоположения ИРИ выбирают координаты точки с наибольшим значением ОКФ. В комплексных системах мониторинга радиоизлучений и земной (и водной) поверхности, имеющих в своем составе не только ПЛ, но и другие пассивные и активные системы видения с высоким разрешением (оптические, инфракрасные, радиосистемы), для устранения неоднозначности ПЛ используют эти системы видения. Для этого при нахождении способами пассивной локации нескольких точек предполагаемого местоположения ИРИ эти точки дополнительно просматривают с помощью системы видения с высоким разрешением, например, радиовидения, и местоположение ИРИ определяют за счет анализа изображений этой системы. Технический результат применения предлагаемого способа заключается в увеличении точности определения местоположения ИРИ, сигнал которого сам или его отдельные спектральные составляющие могут быть представлены как узкополосные когерентные сигналы. Таким сигналом может быть сигнал специального радиомаяка или, в общем случае, неизвестный сигнал ИРИ, получаемый, например, при его формировании путем модуляции несущей частоты f0 некоторым узкополосным (относительно несущей) информационным сигналом. В этом случае значительное увеличение точности определения местоположения ИРИ может быть получено, если оценку квадратурных составляющих огибающей сигнала ИРИ или ее когерентной спектральной составляющей (или их фаз) на выходах АПМ осуществлять с помощью опорного сигнала с учетом его когерентности относительно огибающих на всем интервале синтезирования. Это означает, что система становится пространственно-когерентной (см. вышеупомянутую книгу Бакулева П.А.). При сохранении когерентности приема сигнала ИРИ на всем участке синтезирования этот способ позволяет использовать для оценки положения ИРИ не изменение разности фаз между сигналами разных АПМ при перемещении носителя ПЛ (как по прототипу), а изменение фазы сигнала ИРИ каждого АПМ на интервале синтезирования относительно начала этого интервала, что по принципу и точности лоцирования приближает этот способ к активной локации с синтезированной антенной решеткой (см., например, книгу Кондратенкова Г.С. и Фролова А.Ю. «Радиовидение», М., «Радиотехника», 2005 г.). Поэтому этот способ, по аналогии с активной локацией, может рассматриваться как способ синтезирования пассивной антенной системы (СПАС) со значительным увеличением по сравнению с прототипом, потенциально, на порядок и более, точности определения местоположения ИРИ. Точность определения местоположения ИРИ в предлагаемом способе определяется соотношением Принципиальных ограничений на величину интервала синтезирования нет. Этот интервал ограничивается временем приема сигнала ИРИ, в течение которого этот сигнал остается когерентным (сам сигнал или его спектральная составляющая). На практике необходимо также отсутствие на интервале синтезирования существенных искажений сигнала ИРИ (особенно его фазы), связанных, в частности, с влиянием диаграммы направленности антенн АПМ, конструкции носителя, с появлением существенных переотраженных сигналов от элементов этой конструкции, а также из-за неоднородностей ионосферы и рельефа местности при изменении трассы распространения сигнала ИРИ за счет изменения взаимного расположения носителя и ИРИ на интервале синтезирования. Но, несмотря на все эти ограничения, практически реализуемая точность однозначного определения местоположения ИРИ за счет использования предлагаемого способа может быть существенно увеличена по сравнению с прототипом, в некоторых случаях на порядок и более, особенно при работе в KB- и УКВ- диапазонах. Используемая при определении местоположения ОКФ определяется обобщенной функцией правдоподобия, которую получают, заменив в функции правдоподобия для комплексных огибающих неизвестные при каждом приеме амплитуду и начальную фазу сигнала ИРИ их оценкой по методу максимального правдоподобия (см., например, книгу Куликова Е.И. и Трифонова А.П. «Оценка параметров сигналов на фоне помех», стр.200). Определяя глобальный максимум ОКФ, находят координаты ИРИ R0оц и Y0оц как положение точки этого максимума в координатах R0 и Y0. Определив параметры R0 и Y0, используя знания траектории носителя, можно определить положение ИРИ в пространстве в требуемой системе координат. Перечень фигур: На фиг.1 приведено возможное взаимное расположение ИРИ и носителя на интервале синтезирования. На фиг.2 приведен трехмерный вид нормированной ОКФ вектора комплексных огибающих, полученных на интервале синтезирования от ИРИ, и опорных (предполагаемых) векторов этих же огибающих при разных значениях Y0оп и R0оп с использованием квадратурных составляющих сигналов на выходах одного АПМ (NАПМ=1). На фиг.3 приведена та же ОКФ в двухмерном яркостном изображении. На фиг.4 приведена трехмерная графика для логарифма функции правдоподобия или эквивалентного ему в рассматриваемом случае среднеквадратичного отклонения (СКО) в зависимости от R0oп, Y0oп (с точностью до составляющих, не зависящих от переменных R0oп, Y0oп) при использовании фаз Для пояснения способа можно воспользоваться фиг.1, на которой приведены траектория движения носителя ПЛ (вдоль оси Y) и возможное взаимное расположение ИРИ и носителя на интервале синтезирования. На фиг.1 отражены также дальности до ИРИ R(t) для некоторых тактов приема сигнала ИРИ и измерения его огибающей, а также интервал синтезирования (Dсинт) и эффективный интервал синтезирования (Dсинт_эфф). Если положить для простоты, что ПЛ состоит из одного АПМ, а сигнал ИРИ – гармонический сигнал с неизвестными амплитудой и начальной фазой, то комплексные огибающие сигнала ИРИ на выходе АПМ, полученные относительно опорного сигнала на i-м такте приема сигнала ИРИ в отсутствие мешающих сигналов, можно представить в виде:
где А и
где Ri – расстояния от ИРИ до фазового центра антенны АПМ, От выражения (1) можно перейти к следующей записи сигналов, полагая, что фаза, обусловленная дальностью R1 и фазой опорного сигнала на первом такте, вошли в фазу
где комплексная огибающая
и
а
Если положить, что прием сигналов осуществляется на фоне собственных шумов АПМ, то комплексные огибающие сигнала ИРИ на выходе запишутся:
где Можно перейти к матричной записи, введя векторы-столбцы:
Вектор неизвестных параметров {R0, Y0, А, В этом случае при проведении на интервале синтезирования Nзам тактов приема (замеров) сигнала ИРИ их функция правдоподобия имеет вид:
где R – ковариационная матрица шумов АПМ, detR – определитель матрицы R, а знак [-1] означает обращение матрицы. Из (9), исходя из независимости шумов АПМ в разные такты приема сигнала ИРИ, логарифм функции правдоподобия с точностью до слагаемых и коэффициентов, не влияющих на оценку существенных параметров R0, Y0, можно записать:
Несущественные параметры ИРИ Далее на фиг.2 и фиг.3 для примера приведены результаты численных расчетов нормированной ОКФ Fн(v/R0oп, Y0oп)=F(v/R0oп, Y0oп)/F(v/R0, Y0). На фиг.2 приведен трехмерный вид нормированной ОКФ, а на фиг.3 – та же ОКФ в двухмерном яркостном изображении. Рассмотрен случай определения координат ИРИ с координатами R0=100 км, Y0=-10 км, излучающего непрерывный гармонический сигнал на частоте 300 МГц при интервале между оценками комплексной огибающей сигнала ИРИ Rпов=200 м и числе таких оценок Nзам=101. Потенциальную (теоретически предельную) точность оценок координат ИРИ характеризуют дисперсии эффективных оценок, которые определяются информационной матрицей Фишера, в свою очередь, получаемой на основе функции правдоподобия (9). При некоторых предположениях, упрощающих анализ точности определения местоположения ИРИ, в частности, при известных начальных значениях А,
можно показать, что дисперсии эффективных оценок Y0 и R0 определяются выражениями:
где
Для примера, из выражений (12) и (13) следует, что при При известной траектории полета носителя во времени нетрудно перейти от координат X, Y к любым другим координатам на плоскости, например, к географической системе координат. Как уже отмечалось, при отсутствии хороших априорных данных о положении ИРИ вычисление ОКФ в большом диапазоне возможных значений R0oп, Y0oп может потребовать значительный объем вычислений. Упрощение алгоритма определения координат ИРИ получают за счет перехода от квадратурных составляющих сигнала ИРИ к оценке изменения фазы сигнала ИРИ на интервале синтезирования (относительно опорного сигнала или сигнала ИРИ при первом измерении). Эти оценки с точностью до 2 Для простоты изложения способа можно предположить, как и ранее, что ПЛ имеет в своем составе один АПМ. При каждом i-м приеме сигнала ИРИ оценивают его фазы
где Как уже отмечалось, требуется восстановить закономерность изменения фазы на интервале синтезирования и получить оценку абсолютной фазы на этом интервале относительно 1-го такта. Это можно сделать, применив специальный алгоритм получения однозначной оценки абсолютной фазы. Алгоритм определения однозначной оценки абсолютной фазы может быть получен с учетом плавного характера изменения фазы от одного такта приема сигнала ИРИ к другому. Если при этом период между тактами выбрать таким, чтобы гарантировать, что изменение фазы за период не превышало, например, Используя оценки абсолютной фазы выражение (14) можно записать:
Начальная фаза
Полученные значения абсолютных фаз заносят в массив измерений и по окончании интервала синтезирования используют для аналитической оценки, например, по методу максимального правдоподобия (ММП) или при использовании метода НСКО. Но этих экстремумов может быть несколько. В целях определения глобального экстремума можно воспользоваться разными способами. Можно для всех значений местоположения ИРИ, найденных аналитически, рассчитать ОКФ и, выбирая максимальную ОКФ, определяют ее ГЛ. Местоположение ИРИ определяют путем нахождения положения глобального максимума ОКФ, рассчитанной в области найденного ГЛ. Для иллюстрации возможности определения положения ИРИ по оценкам фаз можно воспользоваться непосредственно выражением (15), что характеризует СКО. Параметры R0oп, Y0oп, при которых достигается минимум СКО (НСКО), характеризует оценку R0, Y0. При этом для упрощения вычислений начальная фаза При работе ПЛ в составе комплекса мониторинга, в котором помимо ПЛ имеется активная и/или пассивная система видения (например, радиовидения) с высоким разрешением, устранение неоднозначности может быть получено за счет использования результатов работы указанной системы видения. Для этого сначала ПЛ обнаруживают и оценивают координаты всех максимумов ОКФ, находящихся в некоторой априорно заданной зоне. Затем по данным системы видения проводят анализ изображений объектов, находящихся в точках максимумов ОКФ. В настоящее время даже радиолокационные системы, особенно, радиолокаторы бокового обзора имеют очень высокое разрешение, например, 0.1 м. Это позволяет, используя априорно известные внешние признаки ИРИ, выделить его. Тем самым определяют координаты этого ИРИ с точностью, соответствующей возможностям используемой системы видения. Положение ИРИ определяется точкой глобального максимума ОКФ. Однако помимо глобального максимума (минимума) ОКФ (НСКО) могут иметь имеет место боковые всплески – боковые лепестки (БЛ) ОКФ, которые могут создать неоднозначность в определении Y0. Однако можно показать аналитически и численными методами, что при определенных условиях максимальные значения (амплитуды) БЛ ОКФ могут быть уменьшены по сравнению с амплитудой главного лепестка (ГЛ) ОКФ настолько, что ГЛ можно выделить даже в условиях воздействия шумов. Наблюдаемое на приведенных чертежах соотношение протяженности ГЛ и удаленности от них первых БЛ зависит от размера эффективной величины синтезированной апертуры и шага приема и оценки квадратурных составляющих огибающей сигнала ИРИ. Расстояние между главным и боковыми лепестками определяется известным соотношением для дифракционных лепестков антенны, состоящей из двух элементов. Оно равно Техническая реализация предлагаемого ПЛ может быть основана на использовании тех же АПМ, которые широко используются в настоящее время в УБС ПЛ. Оцифрованные квадратурные составляющие сигналов на выходах АПМ могут быть записаны в память, например, персональных ЭВМ. С помощью этой же ПЭВМ могут быть произведены все расчеты, например, по построению ОКФ, нахождению глобального максимума и его координат как оценки положения ИРИ.
Формула изобретения
1. Способ определения координат источника радиоизлучения, включающий прием сигнала источника радиоизлучения (ИРИ) пассивным локатором (ПЛ), установленным на движущемся носителе, обнаружение сигнала ИРИ и определение его несущей частоты, формирование на носителе опорного сигнала с последующим формированием с использованием этого опорного сигнала квадратурных составляющих огибающих сигналов ИРИ на выходах антенно-приемных модулей (АПМ) ПЛ, неоднократное измерение во время движения носителя на выбранном интервале синтезирования этих квадратурных составляющих и их запоминание с одновременным запоминанием времени каждого измерения и пространственных координат фазовых центров приемных антенн АПМ на момент измерения с последующим нахождением, например, с помощью метода максимального правдоподобия, местоположения ИРИ на основе данных, полученных на интервале синтезирования, отличающийся тем, что интервал синтезирования выбирают, исходя из требуемой точности определения местоположения ИРИ и из интервала, на котором сохраняется когерентность сигнала ИРИ или его отдельных спектральных составляющих и опорного сигнала, и при формировании квадратурных составляющих сохраняют фазовые соотношения сигнала ИРИ и опорного сигнала на всем интервале синтезирования. 2. Способ по п.1, отличающийся тем, что количество АПМ ПЛ – NАПМ выбирают из условия NАПМ 3. Способ по п.1, отличающийся тем, что при обнаружении сигнала ИРИ определяют его текущий спектр за интервал времени Тсп, выделяют спектральную составляющую, интенсивность которой существенно превышает спектральный уровень шумов на некотором участке интервала наблюдения Тнабл, причем Тнабл>>Тсп, согласовывают протяженность интервала синтезирования с этим участком, отфильтровывают на интервале синтезирования выбранную спектральную составляющую спектра сигнала ИРИ в полосе, согласованной с 1/Тсп, и на основании отфильтрованного сигнала с помощью опорного сигнала многократно оценивают на интервале синтезирования квадратурные составляющие огибающей сигнала ИРИ, которые и используются для определения местоположения ИРИ, при этом Тсп выбирают из условия 4. Способ по п.1, отличающийся тем, что местоположение ИРИ определяют путем нахождения положения точки глобального максимума двумерной обобщенной корреляционной функции (ОКФ), построенной по данным, полученным на интервале синтезирования, например, в декартовой системе координат относительно параметров R0 и Y0, где R0 – удаленность ИРИ от оси Y, определяемой вектором движения носителя на начало интервала синтезирования, а Y0 – начальное смещение носителя на начало синтезирования относительно основания перпендикуляра, опущенного из точки нахождения ИРИ на ось Y. 5. Способ по п.1, отличающийся тем, что при каждом i-м измерении квадратурных составляющих огибающих сигнала ИРИ оценивают фазы этих сигналов 6. Способ по п.5, отличающийся тем, что при нахождении нескольких точек предполагаемого местоположения ИРИ определяют значения ОКФ для всех этих точек и в качестве местоположения ИРИ выбирают координаты точки с наибольшим значением ОКФ. 7. Способ по п.1, отличающийся тем, что при нахождении нескольких точек предполагаемого местоположения ИРИ эти точки дополнительно просматривают с помощью системы видения с высоким разрешением, например, радиовидения, и местоположение ИРИ определяют за счет анализа изображений этой системы.
РИСУНКИ
|
||||||||||||||||||||||||||
 сигнала ИРИ и обеспечивает однозначное определение пеленга за один такт приема сигнала ИРИ. При этом при двухэтапном методе определения местоположения ИРИ вначале в каждом ПЛ с помощью УБС определяют пеленг ИРИ. Затем, исходя из вычисленных пеленгов, триангуляционным способом определяют местоположение ИРИ (см., например, книгу «Теоретические основы радиолокации»./ Под ред. Я.Д.Ширмана, М., Сов. Радио, 1978 г., стр.494). В этом случае УБС может быть выполнена, например, в виде интерферометра, в котором направление на ИРИ определяют, используя оценку разности фаз между сигналами разных АПМ одного ПЛ.
сигнала ИРИ и обеспечивает однозначное определение пеленга за один такт приема сигнала ИРИ. При этом при двухэтапном методе определения местоположения ИРИ вначале в каждом ПЛ с помощью УБС определяют пеленг ИРИ. Затем, исходя из вычисленных пеленгов, триангуляционным способом определяют местоположение ИРИ (см., например, книгу «Теоретические основы радиолокации»./ Под ред. Я.Д.Ширмана, М., Сов. Радио, 1978 г., стр.494). В этом случае УБС может быть выполнена, например, в виде интерферометра, в котором направление на ИРИ определяют, используя оценку разности фаз между сигналами разных АПМ одного ПЛ. 1.
1. >Tсп>1/fc min, где fc min – минимально возможная частота в спектре модуляции сигнала ИРИ,
>Tсп>1/fc min, где fc min – минимально возможная частота в спектре модуляции сигнала ИРИ, 
 оцi с точностью до целого числа 2
оцi с точностью до целого числа 2 , затем восстанавливают абсолютные значения разностей фаз
, затем восстанавливают абсолютные значения разностей фаз 
 0 – случайные амплитуда и начальная фаза, а
0 – случайные амплитуда и начальная фаза, а




 – независимые нормальные комплексные случайные величины с дисперсией квадратурных составляющих
– независимые нормальные комплексные случайные величины с дисперсией квадратурных составляющих  2 сш.
2 сш.
 ,
, 

 и
и  где знак [*] для комплексной величины означает только операцию комплексного сопряжения, могут быть исключены из (10) за счет использования их оценки, например, по методу максимального правдоподобия. Если при этом исключить также слагаемые, не зависящие от определяемых (существенных) параметров R0, Y0, то от выражения (10) можно перейти к ОКФ F(v/R0oп, Y0oп). Здесь R0oп, Y0oп определяют опорные векторы u, а истинные параметры R0, Y0, соответствующие положению ИРИ, определяют вектор сигнала v (с точностью до собственных шумов АПМ).
где знак [*] для комплексной величины означает только операцию комплексного сопряжения, могут быть исключены из (10) за счет использования их оценки, например, по методу максимального правдоподобия. Если при этом исключить также слагаемые, не зависящие от определяемых (существенных) параметров R0, Y0, то от выражения (10) можно перейти к ОКФ F(v/R0oп, Y0oп). Здесь R0oп, Y0oп определяют опорные векторы u, а истинные параметры R0, Y0, соответствующие положению ИРИ, определяют вектор сигнала v (с точностью до собственных шумов АПМ).

 30 м или 1 м, соответственно, а
30 м или 1 м, соответственно, а