Патент на изобретение №2339938
|
||||||||||||||||||||||||||
(54) СПОСОБ ДИАГНОСТИРОВАНИЯ МЕТАЛЛИЧЕСКИХ КОНСТРУКЦИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
(57) Реферат:
Изобретение относится к области технической диагностики и неразрушающего контроля металлических конструкций широкого профиля с использованием метода акустической эмиссии. Техническим результатом изобретения является повышение точности определения координат дефекта, повышение быстродействия и сокращение числа тензодатчиков и тензометрических каналов. Сущность способа заключается в том, что одновременно с регистрацией динамической деформации выполняется регистрация времени прихода сигнала акустической эмиссии при минимальном пороге, равном минимальному уровню шумов, и максимальном пороге, по измеренной деформации осуществляется определение фазы нагрузки и по фазе нагрузки выполняется кластеризация для каждого акустического сигнала. Находится целевая функция кластеризации, и если число сигналов в таком кластере превышает заданный порог по количеству акустических сигналов, то это соответствует наличию дефекта с координатами, равными координатам центра кластера. Предложено устройство для осуществления способа. 2 н.п. ф-лы, 5 ил.
Изобретение относится к области технической диагностики и неразрушающего контроля металлических конструкций широкого профиля, включая сварные корпусные конструкции, сосуды давления, емкости, трубопроводы, авиационные и железнодорожные конструкции, мосты и т.д. с использованием метода акустической эмиссии. Известен способ диагностирования конструкций, включающий регистрацию широкополосных акустических сигналов и их волновой формы, оцифровку волновой формы акустических сигналов, вычисление по ней спектра акустических сигналов, их предварительную обработку, фильтрацию помех, регистрацию времени прихода акустических сигналов и вычисление по нему координат их источников, анализ параметров акустических сигналов и оценку степени опасности источников этих сигналов как потенциальных дефектов диагностируемой конструкции. Кроме того, регистрацию времени прихода акустических сигналов и определение по нему координат их источников производят по частоте дискретизации быстродействующих аналого-цифровых преобразователей, которую синхронизируют по всем приемным каналам системы, а фильтрацию помех, анализ параметров акустических сигналов и оценку степени опасности источников этих сигналов дополнительно производят по вычисленным спектрам акустических сигналов с учетом одновременно вычисляемых координат их источников, причем операции вычисления спектра акустических сигналов, вычисления координат их источников, предварительной обработки акустических сигналов, фильтрации помех, анализа параметров акустических сигналов и оценки степени опасности источников акустических сигналов выполняют параллельно на распределенных по локально-вычислительной сети процессорах многоканальных модулей регистрации и предварительной обработки акустических сигналов и модулей анализа акустических сигналов под управлением операционной системы реального времени (пат. РФ №2141655, МКИ6 G01N 29/14. Многофункциональная акустико-эмиссионная система диагностики конструкций и способ диагностирования на ее основе / Гуменюк В.А., Иванов Ю.Г., Казаков В.А. и др. – приоритет от 24.11.1998 г., Бюл. №32, 1999 г., принятый за аналог). Недостатком данного способа является то, что он предусматривает регистрацию и цифровую обработку широкополосных акустических импульсов в реальном времени. Он совмещает возможности анализа традиционных параметров акустической эмиссии и определения координат дефектов с анализом формы и спектра импульсов и обеспечивает выполнение операций предварительной обработки и критериального анализа акустической информации в режиме экспресс-анализа, т.е. непосредственно в ходе проведения акустико-эмиссионного контроля. Однако данный способ может быть реализован только при небольшой скорости счета. Если же поток регистрируемых сигналов большой, что встречается часто при акустико-эмиссионной диагностике металлических конструкций, то данный способ не реализуем непосредственно в ходе проведения эксперимента. Известно многоканальное акустико-эмиссионное устройство для контроля изделий (патент РФ №2150698, МПК 7 G01N 29/14. Многоканальное акустико-эмиссионное устройство для контроля изделий / Серьезнов А.Н., Муравьев В.В., Степанова Л.Н. и др., приоритет от 25.11.97 г., Бюл. №16, 2000 г.), состоящее из 1…n блоков, каждый из которых содержит четыре измерительных канала, состоящих из последовательно соединенных акустического преобразователя, предварительного усилителя, фильтра, пикового детектора, выход которого соединен с инвертирующим входом компаратора, а также содержит цифроаналоговый преобразователь, выход которого подключен к неинвертирующему входу компаратора, а также коммутатор каналов, основной усилитель, аналого-цифровой преобразователь, оперативное запоминающее устройство и таймер. Кроме того, в устройстве последовательно соединены коммутатор каналов, основной усилитель, аналого-цифровой преобразователь, оперативное запоминающее устройство, выход которого соединен с первым входом устройства сопряжения, причем четыре входа коммутатора каналов соединены с выходами фильтров каналов и входами пиковых детекторов соответствующих каналов, а входы цифроаналоговых преобразователей четырех каналов блока объединены и соединены с первым выходом устройства сопряжения, выходы компараторов каждого канала подключены ко входам таймера, выход которого соединен со вторым входом оперативного запоминающего устройства, второй выход устройства сопряжения соединен с третьим входом таймера, а третий выход устройства сопряжения соединен с шиной компьютера. К числу недостатков данного устройства относятся: – низкое быстродействие, обусловленное наличием коммутирующих устройств в блоках. Низкое быстродействие является причиной появления погрешностей при измерении амплитуды, времени прихода, спектра сигналов акустической эмиссии. Это приводит не только к понижению быстродействия всего устройства, но при этом резко повышаются погрешности локализации и уменьшается объем передаваемой информации; – взаимное влияние каналов, вызванное прохождением паразитных сигналов через коммутирующие устройства на соседний канал; – невозможность определения в реальном масштабе времени спектральных характеристик сигналов акустической эмиссии, а следовательно, и типа дефекта, так как вся обработка информации осуществляется в одном центральном процессоре. Наиболее близким к предлагаемому решению является способ диагностирования металлических мостовых конструкций и устройство для его осуществления (патент РФ №2240551, МПК7 G01N 29/04. Способ диагностирования мостовых металлических конструкций и устройство для его осуществления – / Степанова Л.Н., Муравьев В.В. и др. – приоритет от 20.06.2001 г., Бюл. №18, 2003 г.), включающий прием, регистрацию и оценку параметров сигналов акустической эмиссии в момент нагружения мостовой металлической конструкции, например, проходящим поездом, оцифровку акустических сигналов, вычисление по ней спектра акустических сигналов, их предварительную обработку, фильтрацию помех, регистрацию времени прихода акустических сигналов и вычисление по нему координат развивающихся дефектов. Кроме того, одновременно с регистрацией сигналов с акустических преобразователей осуществляют регистрацию динамической деформации, а регистрацию основных параметров акустических сигналов, координат развивающихся дефектов и их спектральных характеристик осуществляют в момент достижения максимума механических деформаций. Недостатком данного способа является низкая точность определения времен прихода акустического сигнала, так как времена прихода находятся без оценки погрешности их определения, а лишь по превышению порога срабатывания. Кроме того, в данном способе возможна частичная потеря полезной измерительной информации, поскольку акустические сигналы регистрируются только в момент достижения максимума механических деформаций конструкции. Однако дефект может проявлять себя акустически задолго до достижения максимума механических деформаций. Наиболее близким по технической сущности является многоканальное акустико-эмиссионное устройство для диагностики мостовых металлических конструкций (патент РФ №2240551, МПК7 G01N 29/04. Способ диагностирования мостовых металлических конструкций и устройство для его осуществления – / Степанова Л.Н., Муравьев В.В. и др. – приоритет от 20.06.2001 г., Бюл. №18, 2003 г.), состоящее из n блоков, каждый из которых содержит канал, состоящий из последовательно соединенных акустического преобразователя, предварительного усилителя, фильтра, а также аналого-цифрового преобразователя, оперативного запоминающего устройства и устройства сопряжения. Кроме того, в первом канале выход фильтра соединен с последовательно соединенными аналого-цифровым преобразователем, оперативным запоминающим устройством, сигнальным процессором и устройством сопряжения, а также оно снабжено в каждом блоке вторым каналом, состоящим из последовательно соединенных тензодатчика, аналогового преобразователя, аналого-цифрового преобразователя, процессора и устройства сопряжения, причем выходы устройств сопряжения первого и второго каналов блока соединены с сигнальной шиной компьютера, которая, в свою очередь, соединена с компьютером, причем второй выход процессора второго канала блока соединен со вторыми входами оперативного запоминающего устройства и сигнального процессора первого канала, а также со входом генератора, выход которого соединен с ключом, выход которого подключен к акустическому преобразователю. К числу основных недостатков данного устройства относятся: – ограниченная скорость передачи информации по последовательной шине, в результате чего невозможно передавать форму сигнала акустической эмиссии, а следовательно, низкая точность измерения времени прихода сигнала акустической эмиссии, поскольку нельзя проводить оценку погрешности времени прихода по минимальному и максимальному значению порога срабатывания компаратора; – поскольку измерение времен прихода сигнала акустической эмиссии осуществляется с низкой точностью, то, следовательно, с большой погрешностью определяются координаты дефекта; – большая избыточность при построении измерительного блока, поскольку в каждом блоке присутствует как акустический канал, так и канал преобразования информации с тензодатчика. Это усложняет устройство и делает его более дорогим. При разработке заявляемого способа диагностирования металлических конструкций и устройства для его осуществления была поставлена задача повышения точности расчета координат источника сигналов акустической эмиссии в металлических конструкциях. Поставленная задача решается за счет того, что в предлагаемом способе диагностирования металлических конструкций, включающем прием, регистрацию и оценку параметров сигналов акустической эмиссии в момент нагружения металлической конструкции циклической нагрузкой, осуществляют регистрацию динамических деформаций, оцифровку акустических сигналов, их предварительную обработку, фильтрацию помех, регистрацию времени прихода акустических сигналов и вычисление по нему координат развивающихся дефектов. Кроме того, одновременно с регистрацией динамической деформации выполняется регистрация времени прихода сигнала акустической эмиссии при минимальном Unopmin пороге, равном минимальному уровню шумов, и максимальном пороге, равном Unopmax=(Unopmin+Uдоб), (где Uдоб – добавочное значение порогового уровня, равного разности между минимальным и максимальным уровнями шумов), а по измеренной деформации осуществляется определение фазы
где и по фазе нагрузки выполняется кластеризация для каждого акустического сигнала, находится целевая функция кластеризации из условия
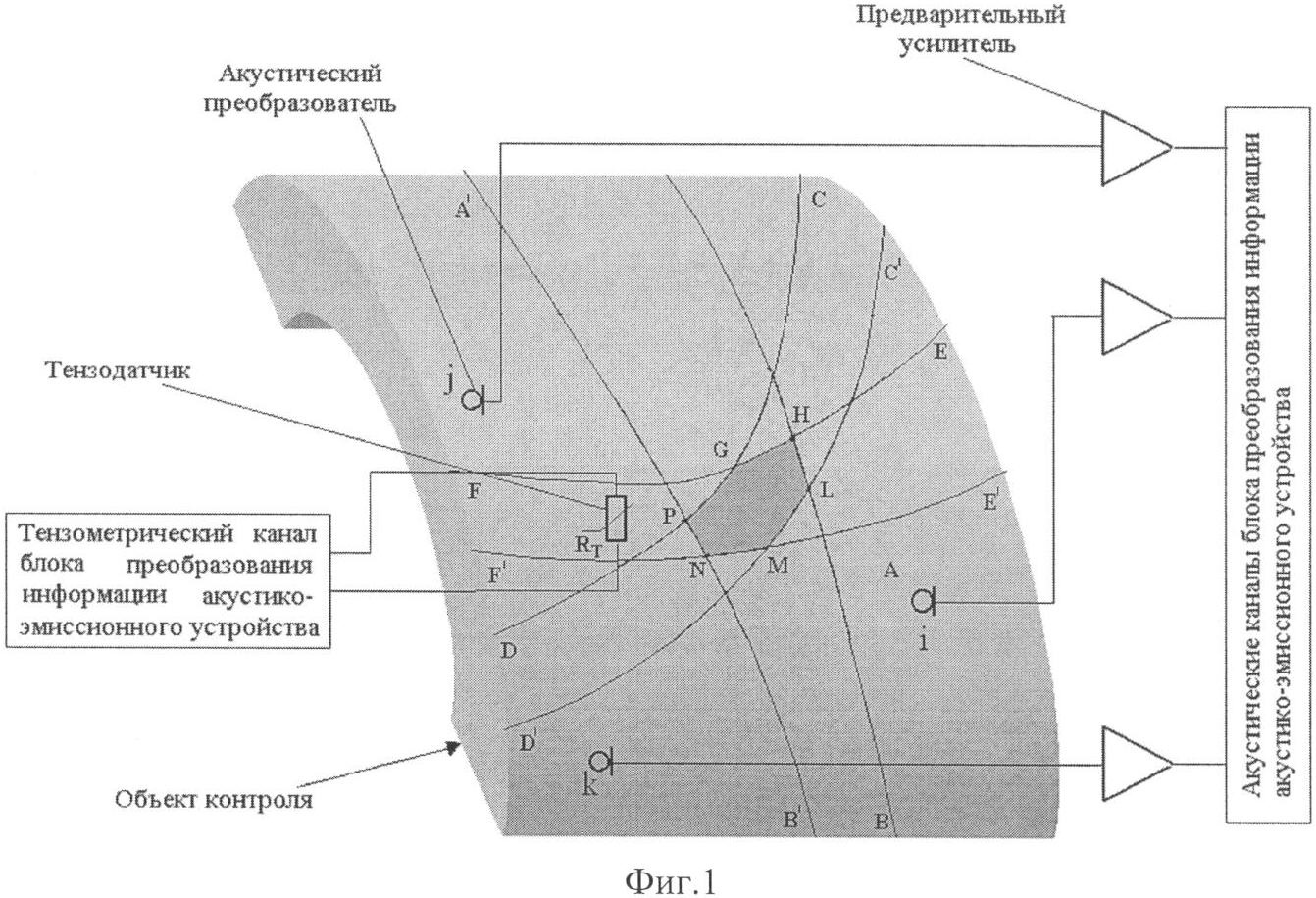
где Поставленная задача решается также за счет того, что многоканальное акустико-эмиссионное устройство для диагностирования металлических конструкций, состоящее из N блоков, каждый из которых содержит акустический канал, состоящий из последовательно соединенных акустического преобразователя, предварительного усилителя, фильтра, аналого-цифрового преобразователя, оперативного запоминающего устройства, а также тензометрический канал, состоящий из последовательно соединенных тензодатчика, аналого-цифрового преобразователя, а также каждый канал блока соединен с сигнальной шиной компьютера и компьютером. Кроме того, каждый акустический канал снабжен нормирующим усилителем, устройством управления, многоканальным таймером-счетчиком, цифроаналоговым преобразователем, суммирующим усилителем, первым и вторым компараторами, источником опорного напряжения, а тензометрический канал снабжен источником опорного напряжения, модулятором опорного напряжения, буферным усилителем, операционным усилителем источника тока, прецизионным токозадающим резистором, токовым переключателем, устройством управления тензометрическим каналом, причем в каждом акустическом канале цифровой выход оперативного запоминающего устройства соединен с первым цифровым входом устройства управления акустического канала, его второй цифровой вход соединен с цифровым выходом многоканального таймера-счетчика, его третий цифровой вход – с шиной PCI компьютера, первый выход устройства управления соединен со входом оперативного запоминающего устройства, его второй выход соединен со входом цифроаналогового преобразователя, выход которого соединен с первым входом суммирующего усилителя и инвертирующим входом второго компаратора, неинвертирующий вход которого соединен с неинвертирующим входом первого компаратора и последовательно соединенными нормирующим усилителем и аналого-цифровым преобразователем, а вход нормирующего усилителя соединен с выходом фильтра, а инвертирующий вход первого компаратора соединен с выходом суммирующего усилителя, второй вход которого соединен с выходом источника опорного напряжения, выходы первого и второго компараторов соединены соответственно с первым и вторым входами многоканального таймера-счетчика, третий вход которого соединен с шиной PCI, а каждый блок снабжен тензометрическим каналом, состоящим из последовательно соединенного инструментального усилителя и нормирующего усилителя, а также последовательно соединенными источника опорного напряжения, модулятора опорного напряжения и буферного усилителя, выход которого соединен с опорным входом прецизионного инструментального усилителя, а неинвертирующий вход операционного усилителя источника тока соединен с последовательно соединенными модулятором опорного напряжения и буферным усилителем, а инвертирующий вход соединен с номинальным резистором, второй конец которого соединен с общей шиной, и вторым выходом токового переключателя, первый выход которого соединен с тензодатчиком, а управляющий вход – с первым выходом устройства управления тензометрическим каналом, а первый вход соединен с выходом операционного усилителя источника тока, а второй выход устройства управления тензометрическим каналом соединен с управляющим входом модулятора опорного напряжения, третий выход устройства управления тензометрическим каналом соединен со вторым входом аналого-цифрового преобразователя, а первый цифровой вход устройства управления тензометрическим каналом соединен с цифровым выходом аналого-цифрового преобразователя, второй цифровой вход устройства управления тензометрическим каналом соединен с шиной PCI, которая соединена с компьютером. Предлагаемое устройство по сравнению с существующими акустико-эмиссионными устройствами (Серьезнов А.Н., Степанова Л.Н., Муравьев В.В. и др. Диагностика объектов транспорта методом акустической эмиссии- / Под ред. Л.Н.Степановой, В.В.Муравьева. – М.: Машиностроение, 2004, 367 с.) обладает возможностью оценки погрешности определения времени прихода сигнала акустической эмиссии за счет использования времени срабатывания по второму порогу дискриминации, равного Unopmax=(Unopmin+Uдоб), (где Uдоб – добавочное значение порогового уровня, равного разности между минимальным и максимальным уровнями шумов). Кроме того, по сравнению с известными системами увеличено быстродействие за счет фильтрации паразитных сигналов. Например, если время срабатывания по второму порогу дискриминации превышает некоторое предварительно заданное значение, т.е. фронт сигнала акустической эмиссии неявно выражен либо очень затянут, то это означает, что определить точное время прихода такого сигнала практически невозможно. Следовательно, нет необходимости считывать из оперативного запоминающего устройства информацию о дискретной реализации формы такого сигнала. Такие сигналы не записываются в компьютер. Это означает, что сокращается время обработки сигналов, а значит, повышается быстродействие акустического канала устройства. На фиг.1 изображена область локализации GHLMNP по трем линиям положения для пьезоантенны, составленной из акустических преобразователей i, j, k. На фиг.2 показано определение времени прихода сигнала акустической эмиссии при минимальном Unopmin и максимальном Unopmax порогах селекции. На фиг.3 показана функциональная схема системы диагностирования металлических конструкций. На фиг.4 изображена область локализации сигнала акустической эмиссии. На фиг.5 показан выбор кластера для вхождения сигнала акустической эмиссии в соответствующий кластер. Устройство, реализующее способ диагностирования металлических конструкций (фиг.3), содержит 1…N – блоки; 2 – ПАЭ; 3 – предварительный усилитель; 4 – полосовой фильтр; 5 – аналого-цифровой преобразователь (АЦП) акустического канала; 6 – оперативное запоминающее устройство (ОЗУ); 7 – тензодатчик; 8 – аналого-цифровой преобразователь тензометрического канала; 9 – интерфейсная шина PCI; 10 – компьютер; 11 – нормирующий усилитель акустического канала; 12 – устройство управления акустического канала; 13 – многоканальный таймер-счетчик; 14 – цифроаналоговый преобразователь (ЦАП); 15 – суммирующий усилитель; 16 – первый компаратор; 17 – второй компаратор; 18 – источник опорного напряжения акустического канала; 19 – прецизионный инструментальный усилитель; 20 – нормирующий усилитель тензометрического канала; 21 – источник опорного напряжения тензометрического канала; 22 – модулятор опорного напряжения; 23 – буферный усилитель; 24 – операционный усилитель источника тока; 25 – прецизионный токозадающий резистор; 26 – токовый переключатель. 27 – устройство управления тензометрического канала. Практическая реализация предлагаемого устройства, реализующего способ диагностирования металлических конструкций, выполняется по известным схемам с использованием следующих компонентов: 1. Схема предварительного усилителя 3 приведена в книге (Серьезнов А.Н., Степанова Л.Н. и др. Акустико-эмиссионная диагностика конструкций. – М.: Радио и связь, 2000, С.83, рис.3.3). 2. Первый (16) и второй (17) компараторы выполнены на микросхеме LM311, модулятор опорного напряжения и токовый переключатель выполнены на микросхемах КР590КН5. 3. Полосовой фильтр (4) выполнен по двухзвенной схеме активных фильтров второго порядка на операционных усилителях МС33282 фирмы «Motorolla», пример реализации приведен в книге (Гутников B.C. Интегральная электроника в измерительных устройствах. – Л.: Энергоатомиздат, Ленинградское отделение, 1988, с.105, рис.3.8, б. 4. Суммирующий усилитель (15) выполнен на операционном усилителе МС33282 фирмы «Motorolla», пример реализации приведен в книге (Гутников B.C. Интегральная электроника в измерительных устройствах. – Л.: Энергоатомиздат, Ленинградское отделение, 1988, с.43, рис.1.17, б. 5. Нормирующий усилитель акустического канала (11) собран на операционном усилителе AD8138, нормирующий усилитель тензометрического канала собран на операционном усилителе AD621. 6. Источник опорного напряжения акустического канала (18) собран на микросхеме REF192 с делителем напряжения на выходе, а источник опорного напряжения тензометрического канала (21) собран на микросхеме REF198. 7. Операционный усилитель источника тока (24) выполнен на микросхеме AD817, в качестве прецизионного токозадающего резистора (25) использован резистор С2-29С, цифроаналоговый преобразователь (ЦАП) (15) собран на микросхемах AD7545 и МС33272. 8. Прецизионный инструментальный усилитель (19) выполнен на микросхеме INA 111 фирмы Burr-Brown Corporation. 9. Устройство управления тензометрическим (27) и акустическим (12) каналами, многоканальный таймер-счетчик (13) выполнены на программируемых логических интегральных схемах ПЛИС фирмы «Altera» EPF10K10TC. 10. Аналого-цифровой преобразователь (5) акустического канала выполнен на микросхеме AD9220, аналого-цифровой преобразователь (8) тензометрического канала – на микросхеме AD7892 фирмы Analog Devices. 11. Оперативное запоминающее устройство (6) выполнено на микросхемах статического операционного устройства (ОЗУ) AS7C1026. Информация о микросхемах находится на официальных сайтах фирм Analog Devices, Motorolla, Altera (Motorolla – www.moto.com: фирмы ALTERA – www.altera.com; фирмы Analog Devices – www.ad.com, фирмы Burr-Brown Corporation – www.burr-brown.com). Многоканальное акустико-эмиссионное устройство для диагностирования металлических конструкций, состоящее из N блоков, каждый из которых содержит акустический канал, состоящий из последовательно соединенных акустического преобразователя 2, предварительного усилителя 3, фильтра 4, аналого-цифрового преобразователя 5, оперативного запоминающего устройства 6, а также тензометрический канал, состоящий из последовательно соединенных тензодатчика 7, аналого-цифрового преобразователя 8, а также каждый канал блока соединен с сигнальной шиной компьютера 9 и компьютером 10. Кроме того, каждый акустический канал снабжен нормирующим усилителем 11, устройством управления 12, многоканальным таймером-счетчиком 13, цифроаналоговым преобразователем 14, суммирующим усилителем 15, первым 16 и вторым 17 компараторами, источником опорного напряжения 18, а тензометрический канал снабжен прецизионным инструментальным усилителем 19, нормирующим усилителем 20, источником опорного напряжения 21, модулятором опорного напряжения 22, буферным усилителем 23, операционным усилителем источника тока 24, прецизионным токозадающим резистором 25, токовым переключателем 26, устройством управления тензометрическим каналом 27, причем в каждом акустическом канале цифровой выход оперативного запоминающего устройства 6 соединен с первым цифровым входом устройства управления акустического канала 12, его второй цифровой вход соединен с цифровым выходом многоканального таймера-счетчика 13, его третий цифровой вход – с шиной PCI 9 компьютера 10, первый выход устройства управления 12 соединен со входом оперативного запоминающего устройства 6, его второй выход соединен со входом цифроаналогового преобразователя 14, выход которого соединен с первым входом суммирующего усилителя 15 и инвертирующим входом второго компаратора 17, неинвертирующий вход которого соединен с неинвертирующим входом первого компаратора 16 и последовательно соединенными нормирующим усилителем 11 и аналого-цифровым преобразователем 5, а вход нормирующего усилителя 11 соединен с выходом фильтра 4, а инвертирующий вход первого компаратора 16 соединен с выходом суммирующего усилителя 15, второй вход которого соединен с выходом источника опорного напряжения 18, выходы первого 16 и второго 17 компараторов соединены соответственно с первым и вторым входами многоканального таймера-счетчика 13, третий вход которого соединен с шиной PCI 9, а также каждый блок снабжен тензометрическим каналом, состоящим из последовательно соединенного инструментального усилителя 19 и нормирующего усилителя 20, а также последовательно соединенными источника опорного напряжения 21, модулятора опорного напряжения 22 и буферного усилителя 23, выход которого соединен с опорным входом прецизионного инструментального усилителя 19, а неинвертирующий вход операционного усилителя 24 источника тока соединен с последовательно соединенными модулятором опорного напряжения 22 и буферным усилителем 23, а инвертирующий вход соединен с номинальным резистором 25, второй конец которого соединен с общей шиной, и вторым выходом токового переключателя 26, первый выход которого соединен с тензодатчиком 7, а управляющий вход – с первым выходом устройства управления тензометрическим каналом 27, а первый вход соединен с выходом операционного усилителя 24 источника тока, а второй выход устройства управления 27 тензометрическим каналом соединен с управляющим входом модулятора 22 опорного напряжения, третий выход устройства управления 27 тензометрическим каналом соединен со вторым входом аналого-цифрового преобразователя 8, а первый цифровой вход устройства управления 27 тензометрическим каналом соединен с цифровым выходом аналого-цифрового преобразователя 8, второй цифровой вход устройства управления 27 тензометрическим каналом соединен с шиной PCI 9, которая соединена с компьютером 10. Предложенная система и способ работают следующим образом. На первом этапе производится установка пьезоантенны на объект контроля. Пьезоантенна состоит из m (m
где а – расстояние между акустическим преобразователем имитатора сигнала акустической эмиссии, работающим в режиме излучения, и i-м акустическим преобразователем пьезоантенны, работающим в режиме приема; На следующем этапе осуществляется нагружение металлической конструкции циклической нагрузкой. При нагружении металлического объекта контроля возникают акустические сигналы, поступающие на входы акустических преобразователей i, j, k, образующих пьезоантенну (фиг.1). Акустические преобразователи i, j, k работают в режиме приема и преобразуют акустические сигналы в электрические. На фиг.2 показано определение времени прихода сигнала акустической эмиссии при минимальном Unopmin и максимальном Unopmax порогах селекции. На фиг.3 приведена функциональная схема системы диагностирования металлических конструкций. В каждом акустическом канале электрические сигналы с выходов акустических преобразователей 2 поступают на предварительные усилители 3 и усиливаются на 40 дБ. С выхода предварительных усилителей 3 сигналы проходят на входы полосовых фильтров 4, обеспечивающих подавление паразитных сигналов за пределами полосы пропускания. С выхода фильтров 4 сигналы поступают на входы нормирующих усилителей 11, где усиливаются и затем подаются на входы аналого-цифровых преобразователей (АЦП) 5, где происходит дискретизация сигналов АЭ с частотой 4 МГц. Для формирования порога селекции каждого из акустических каналов системы i, j, k центральный процессор компьютера 10 через шину PCI 9 подает в устройство управления канала 12 команду записи порогового значения, и по последовательной линии код посылается в цифроаналоговый преобразователь (ЦАП) 14. При этом на выходе ЦАП 14 формируется пороговое напряжение Unop. Пороговое напряжение Unop поступает на инвертирующий вход второго компаратора 17 и вход суммирующего усилителя 15. На второй вход суммирующего усилителя 15 поступает напряжение пороговой добавки Uдоб, формируемой источником опорного напряжения 18 акустического канала. На выходе суммирующего усилителя 15 формируется напряжение второго порога, равное (Unop+Uдоб), поступающее на инвертирующий вход первого компаратора 16. Для записи в многоканальный таймер-счетчик 13 значения времени измерения компьютер 10 через шину PCI 9 подает в устройство управления акустического канала 12 команду записи значения времени измерения. Код времени измерения записывается в регистр многоканального таймера-счетчика 13. Для запуска процесса измерения акустических каналов i, j, k блока m центральный процессор компьютера 10 через шину PCI 9 подает в устройство управления акустического канала 12 команду на запуск измерения, которое разрешает запись измерительной информации в оперативное запоминающее устройство 6. При этом 64-разрядные счетчики времени в многоканальном таймере-счетчике 13 начинают синхронно по всем акустическим каналам отсчет времени. Синхронизация работы счетчиков обеспечивается тактовой частотой шины PCI 9. Выходные шины аналого-цифровых преобразователей 5 подключены к входам оперативного запоминающего устройства (ОЗУ) 6. В оперативном запоминающем устройстве 6 организован циклический буфер, в котором сохраняются результаты измерений. Сигналы акустической эмиссии с выходов нормирующих усилителей 11 одновременно поступают и на неинвертирующие входы первого 16 и второго 17 компараторов. В случае превышения порогового значения Unop второй компаратор 17 выдает сигнал на многоканальный таймер-счетчик 13, запуская счетчик времени измерения и одновременно регистрируя время прихода сигнала в 64-разрядном счетчике времени. В случае превышения второго порогового значения (Unop+Uдоб) первый компаратор 16 выдает сигнал на многоканальный таймер-счетчик 13, в котором регистрируется время срабатывания первого компаратора 16 относительно времени срабатывания второго компаратора 17. По окончании времени измерения многоканальный таймер-счетчик 13 выдает в устройство управления акустического канала 12 команду, по которой устройство управления запрещает запись в оперативное запоминающее устройство 6 и выставляет на шину PCI 9 сигнал прерывания. По данному сигналу прерывания центральный процессор компьютера 10 может считывать из оперативного запоминающего устройства 6 через устройство управления акустического канала 12 дискретную реализацию формы сигнала акустической эмиссии. Кроме того, центральный процессор компьютера 10 через шину PCI 9 и устройство управления акустического канала 12 считывает из многоканального таймера-счетчика 13 64-разрядное значение времени прихода сигнала акустической эмиссии и время срабатывания первого компаратора 16. Время срабатывания первого компаратора 16 будет давать ошибку определения времени прихода. Одновременно с записью акустической информации, которая осуществляется акустическими каналами, производится запись тензометрической информации (фиг.3). Для этого центральный процессор компьютера 10 через шину PCI 9 подает в устройство управления тензометрического канала 27 команду на запуск измерения. Устройство управления тензометрического канала 27 формирует сигналы управления модулятором опорного напряжения 22, формируя тем самым фазы «измерения +» и «измерения -». На выходе прецизионного инструментального усилителя 19 формируется двухполярный импульс, амплитуда которого пропорциональна отклонению сопротивления тензодатчика 7 от номинального значения. Через нормирующий усилитель 20 тензометрического канала сигнал поступает на вход аналого-цифрового преобразователя 8 тензометрического канала, где производятся измерения в фазе «измерения +» и «измерения -». Результаты измерения записываются в устройство управления тензометрическим каналом 27 и затем через шину PCI 9 считываются центральным процессором компьютера 10. Процесс измерения значения информативного параметра тензодатчика 7, т.е. сопротивления одиночного тензорезистора, подразделяется на три временные фазы: измерения +», «измерения -», «измерения 0». Источник опорного напряжения 21 формирует прецизионное опорное напряжение величиной 4,096 В. Опорное напряжение с выхода источника опорного напряжения 21 поступает на вход модулятора опорного напряжения 22. Затем модулированное опорное напряжение поступает на вход буферного усилителя 23 и вход источника тока, собранного на быстродействующем операционном усилителе 24 и прецизионном токозадающем резисторе 25. Принцип работы источника тока основан на отслеживании постоянного значения напряжения на прецизионном токозадающем резисторе 25. Во время фазы «измерение 0» ток питания тензодатчика 7 равен нулю и выходное напряжение прецизионного инструментального усилителя 19 равно нулю. Токовый переключатель 26 находится в положении 1, при котором осуществляется замыкание тока на эталонном прецизионном резисторе 25. При этом ток в тензодатчике 7 отсутствует. Модулятор опорного напряжения 22 через буферный усилитель 23 подключает опорный вход прецизионного инструментального усилителя 19 к общей шине. Затем следует фаза «измерение +», и в этой фазе модулятор напряжения 22 выдает положительный импульс опорного напряжения и источник тока посылает ток положительного направления в линию тензодатчика 7, так как при этом токовый переключатель 26 находится в положении 2. При протекании тока через тензодатчик 7 на потенциальных линиях, подключенных к входам прецизионного инструментального усилителя 19, возникает разность потенциалов, пропорциональная значению сопротивления тензодатчика 7. Модулятор напряжения 22 в фазе «измерения +» выдает на опорный вход прецизионного инструментального усилителя 19 положительное значение напряжения, соответствующее падению напряжения на тензодатчике 7 с номинальным сопротивлением при протекании через него тока источника тока. В результате на выходе прецизионного инструментального усилителя 19 формируется напряжение, пропорциональное отклонению сопротивления тензодатчика 7 от номинального значения. Напряжение с выхода прецизионного инструментального усилителя 19 подается на вход нормирующего усилителя 20 тензометрического канала, где усиливается и затем подается на вход быстродействующего аналого-цифрового преобразователя 8 для измерения. В фазе «измерение -» работа устройства анналогична работе в фазе «измерения +». Однако при этом направление тока, протекающего через тензодатчик 7, изменяется. На выходе модулятора опорного напряжения 22 напряжение принимает отрицательное значение. Процесс измерения заканчивается фазой «измерение 0». Выходной сигнал прецизионного инструментального усилителя 19 пропорционален отклонению информативного параметра тензодатчика 7 от номинального значения. Этот сигнал усиливается нормирующим усилителем 20 тензометрического канала и поступает на вход аналого-цифрового преобразователя 8 тензометрического канала. В результате измеренное значение информативного параметра тензодатчика 7 вычисляется как полуразность значений, полученных при измерениях в фазах «измерения +» и «измерения – », позволяет уменьшить влияние дрейфа операционных усилителей и обеспечивает подавление низкочастотных помех. Деформация
где Известно, что локализация сигналов акустической эмиссии осуществляется по разности времен прихода сигнала на акустические преобразователи. При этом погрешности локализации связаны с погрешностями определения времени прихода сигнала акустической эмиссии на акустические преобразователи (рис.2). Погрешности определения времени прихода приводят к разбросу точек локализации сигналов акустической эмиссии от одного источника на развертке объекта контроля (Диагностика объектов транспорта методом акустической эмиссии / Серьезнов А.Н., Степанова Л.Н., Муравьев В.В. и др. – / Под ред. Л.Н.Степановой, В.В.Муравьева/ – М.: Машиностроение, 2004, 367 с). Для принятого сигнала акустической эмиссии определяются три акустических преобразователя i, j, k (фиг.1) пьезоантенны, на которые сигнал поступил с минимальным временем прихода. Погрешность времени прихода сигнала
где timax – время прихода сигнала акустической эмиссии, полученное при максимальном значении порогового уровня Unopmax, timin – время прихода сигнала акустической эмиссии, полученное при минимальном значении порогового уровня Unopmin. Минимальное значение порогового уровня Unopmin выставляется цифроаналоговым преобразователем 14 на входе второго компаратора 17 на уровне, превышающем уровень шумов соответствующего акустического канала. Максимальное значение порогового уровня Unopmax определяется минимальным уровнем Unopmin с добавлением значения опорного напряжения источника 19 Uдоб, равного Uдоб=Unopmax-Unopmin. Затем рассчитывается погрешность разности времен прихода
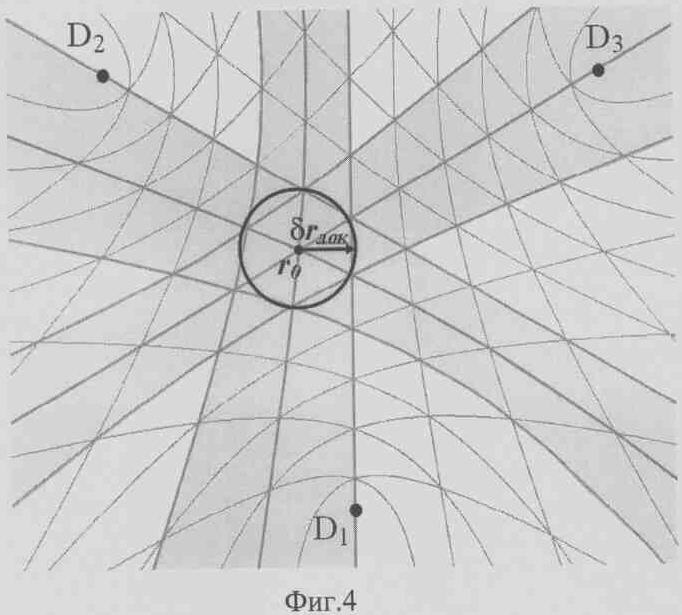
На фиг.4 показана область локализации сигнала акустической эмиссии, где D1, D2, D3 – акустические преобразователи; r0 – точка локализации; Для точки локализации находится погрешность определения линии положения (гиперболы)
где Аналогично определяется погрешность другой линии положения (гиперболы)
Таким образом, по известным погрешностям двух линий положения, определяемым по формулам (4), (5), рассчитывается средняя квадратичная радиальная погрешность локализации
где Радиальная ошибка локализации
(Диагностика объектов транспорта методом акустической эмиссии / Серьезнов А.Н., Степанова Л.Н., Муравьев В.В. и др. – / Под ред. Л.Н.Степановой, В.В.Муравьева. – М.: Машиностроение, 2004, с.102). Для каждого сигнала акустической эмиссии, для каждого из имеющихся на момент поступления сигнала кластера, определяется величина
где Сr – «весовой» коэффициент геометрического признака; Затем задается минимальный коэффициент перекрытия области локализации сигнала и кластера, при котором сигнал может быть отнесен к данному кластеру
Если неравенство (8) не выполняется ни для одного из кластеров (фиг.5), то на основе данного сигнала образуется новый кластер. Если неравенство (9) выполняется только для одного кластера, то считается, что сигнал относится к данному кластеру. Если условие (9) выполняется для n кластеров, то считается, что выбор кластера является задачей распознавания образа сигнала, для решения которой необходимо использовать параметры сигнала и сигнал принадлежит кластеру, для которого значение целевой функции
где
Нормированное отклонение
где Фаза нагрузки
Дисперсия
где n – число разбиений периода T, с которым прикладывается циклическая нагрузка к объекту контроля. Параметр n определяет «размер» кластера в проекции на фазу нагрузки
где Kx, Ky – координаты х и у кластера; rxi, ryi – координаты точки локализации сигнала i, входящего в кластер; ( (Диагностика объектов транспорта методом акустической эмиссии / Серьезнов А.Н., Степанова Л.Н., Муравьев В.В. и др. – / Под ред. Л.Н.Степановой, В.В.Муравьева. – М.: Машиностроение, 2004, с.120). Для каждого из кластеров производится сравнение количества сигналов с пороговым значением. При превышении порогового значения считается, что кластер соответствует дефекту, координаты которого равны координатам центра кластера. В предлагаемом способе за счет учета погрешности измерения времен прихода сигналов акустической эмиссии при кластеризации более точно определяются координаты дефекта. Для практической реализации предлагаемого способа достаточно на зону, состоящую из m акустических преобразователей, установить один тензодатчик. По измеренной деформации осуществляется определение фазы нагрузки, при которой проводится кластеризация каждого акустического сигнала. По превышению числа акустических сигналов в кластере определенного порога судят о наличии дефекта с координатами, равными координатам центра кластера. Это позволяет (по сравнению с прототипом) сократить число тензодатчиков и тензометрических каналов, работающих с тензодатчиками, в m раз. В предлагаемом устройстве (по сравнению с прототипом) повышается быстродействие, так как сокращается время обработки за счет фильтрации паразитных сигналов. Повышается точность определения координат дефекта за счет учета погрешности определения времен прихода сигналов акустической эмиссии по двум порогам селекции, которые определяются по минимальному и максимальному уровням шумов.
Формула изобретения
1. Способ диагностирования металлических конструкций, включающий прием, регистрацию и оценку параметров сигналов акустической эмиссии в момент нагружения металлической конструкции циклической нагрузкой, регистрацию динамических деформаций, оцифровку акустических сигналов, их предварительную обработку, фильтрацию помех, регистрацию времени прихода акустических сигналов и вычисление по нему координат развивающихся дефектов, отличающийся тем, что одновременно с регистрацией динамической деформации выполняется регистрация времени прихода сигнала акустической эмиссии при минимальном Unopmin пороге, равном минимальному уровню шумов, и максимальном пороге, равном Unopmax=(Unopmin+Uдоб), (где Uдоб – добавочное значение порогового уровня, равного разности между минимальным и максимальным уровнями шумов), а по измеренной деформации осуществляется определение фазы
где
и по фазе нагрузки выполняется кластеризация для каждого акустического сигнала, находится целевая функция кластеризации из условия
где
C Cr – «весовой» коэффициент геометрического признака;
2. Многоканальное акустико-эмиссионное устройство для диагностирования металлических конструкций, состоящее из N блоков, каждый из которых содержит акустический канал, состоящий из последовательно соединенных акустического преобразователя, предварительного усилителя, фильтра, аналого-цифрового преобразователя, оперативного запоминающего устройства, а также тензометрический канал, состоящий из последовательно соединенных тензодатчика, аналого-цифрового преобразователя, а также каждый канал блока соединен с сигнальной шиной компьютера и компьютером, отличающееся тем, что каждый акустический канал снабжен нормирующим усилителем, устройством управления, многоканальным таймером-счетчиком, цифро-аналоговым преобразователем, суммирующим усилителем, первым и вторым компараторами, источником опорного напряжения, а тензометрический канал снабжен прецизионным инструментальным усилителем, нормирующим усилителем, источником опорного напряжения, модулятором опорного напряжения, буферным усилителем, операционным усилителем источника тока, прецизионным токозадающим резистором, токовым переключателем, устройством управления тензометрическим каналом, причем в каждом акустическом канале цифровой выход оперативного запоминающего устройства соединен с первым цифровым входом устройства управления акустического канала, его второй цифровой вход соединен с цифровым выходом многоканального таймера-счетчика, его третий цифровой вход – с шиной PCI компьютера, первый выход устройства управления соединен со входом оперативного запоминающего устройства, его второй выход соединен со входом цифроаналогового преобразователя, выход которого соединен с первым входом суммирующего усилителя и инвертирующим входом второго компаратора, неинвертирующий вход которого соединен с неинвертирующим входом первого компаратора и последовательно соединенными нормирующим усилителем и аналого-цифровым преобразователем, а вход нормирующего усилителя соединен с выходом фильтра, при этом инвертирующий вход первого компаратора соединен с выходом суммирующего усилителя, второй вход которого соединен с выходом источника опорного напряжения, выходы первого и второго компараторов соединены соответственно с первым и вторым входами многоканального таймера-счетчика, третий вход которого соединен с шиной PCI, а также каждый блок снабжен тензометрическим каналом, состоящим из последовательно соединенного инструментального усилителя и нормирующего усилителя, образующих аналоговый преобразователь, а также последовательно соединенными источника опорного напряжения, модулятора опорного напряжения и буферного усилителя, выход которого соединен с опорным входом прецизионного инструментального усилителя, а неинвертирующий вход операционного усилителя источника тока соединен с последовательно соединенными модулятором опорного напряжения и буферным усилителем, при этом инвертирующий вход соединен с номинальным резистором, второй конец которого соединен с общей шиной, и вторым выходом токового переключателя, первый выход которого соединен с тензодатчиком, а управляющий вход – с первым выходом устройства управления тензометрическим каналом, первый вход соединен с выходом операционного усилителя источника тока, а второй выход устройства управления тензометрическим каналом соединен с управляющим входом модулятора опорного напряжения, третий выход устройства управления тензометрическим каналом соединен со вторым входом аналого-цифрового преобразователя, а первый цифровой вход устройства управления тензометрическим каналом соединен с цифровым выходом аналого-цифрового преобразователя, второй цифровой вход устройства управления тензометрическим каналом соединен с шиной PCI, которая соединена с компьютером.
РИСУНКИ
|
||||||||||||||||||||||||||
 нагрузки по формуле
нагрузки по формуле
 – текущая деформация;
– текущая деформация;  ,
, (
( ) – функция нормального распределения;
) – функция нормального распределения;  – геометрический признак, равный отношению площади области локализации сигнала акустической эмиссии, полученной при минимальном и максимальном значениях порогового уровня, и площади перекрытия области локализации сигнала и кластера; C
– геометрический признак, равный отношению площади области локализации сигнала акустической эмиссии, полученной при минимальном и максимальном значениях порогового уровня, и площади перекрытия области локализации сигнала и кластера; C – площадь области локализации сигнала;
– площадь области локализации сигнала;  – площадь перекрытия области локализации сигнала в кластере, если число сигналов в таком кластере превышает заданный порог по количеству акустических сигналов, то это соответствует наличию дефекта с координатами, равными координатам центра кластера.
– площадь перекрытия области локализации сигнала в кластере, если число сигналов в таком кластере превышает заданный порог по количеству акустических сигналов, то это соответствует наличию дефекта с координатами, равными координатам центра кластера. 3) акустических преобразователей 2 и одного тензодатчика 7. Затем осуществляется калибровка, при которой измеряется скорость звука С в конструкции
3) акустических преобразователей 2 и одного тензодатчика 7. Затем осуществляется калибровка, при которой измеряется скорость звука С в конструкции ,
, t – время распространения акустического сигнала от акустического преобразователя, работающего в режиме излучения, до i-го акустического преобразователя пьезоантенны, работающего в режиме приема.
t – время распространения акустического сигнала от акустического преобразователя, работающего в режиме излучения, до i-го акустического преобразователя пьезоантенны, работающего в режиме приема.


 rлок – вероятное отклонение точки локализации. Изображенные на фиг.4 гиперболы соответствуют разностям времен прихода, изменяющимся с постоянным шагом
rлок – вероятное отклонение точки локализации. Изображенные на фиг.4 гиперболы соответствуют разностям времен прихода, изменяющимся с постоянным шагом  U, который показывает скорость его возрастания в данной точке (Диагностика объектов транспорта методом акустической эмиссии / Серьезнов А.Н., Степанова Л.Н., Муравьев В.В. и др. – / Под ред. Л.Н.Степановой, В.В.Муравьева. – М.: Машиностроение, 2004, с.95-96).
U, который показывает скорость его возрастания в данной точке (Диагностика объектов транспорта методом акустической эмиссии / Серьезнов А.Н., Степанова Л.Н., Муравьев В.В. и др. – / Под ред. Л.Н.Степановой, В.В.Муравьева. – М.: Машиностроение, 2004, с.95-96). ij, определяемой разностью времен прихода между акустическими преобразователями i и j:
ij, определяемой разностью времен прихода между акустическими преобразователями i и j:
 – угол пересечения линий положения, образованных гиперболами, соответствующими постоянной разности времен прихода сигнала на акустические преобразователи i, j и i, k.
– угол пересечения линий положения, образованных гиперболами, соответствующими постоянной разности времен прихода сигнала на акустические преобразователи i, j и i, k.
 r, являющаяся геометрическим признаком кластеризации. Геометрический признак кластеризации определяется отношением площадей области локализации сигнала и площади перекрытия области локализации сигнала и кластера:
r, являющаяся геометрическим признаком кластеризации. Геометрический признак кластеризации определяется отношением площадей области локализации сигнала и площади перекрытия области локализации сигнала и кластера:
 – площадь области локализации сигнала;
– площадь области локализации сигнала;  – площадь перекрытия области локализации сигнала и кластера.
– площадь перекрытия области локализации сигнала и кластера.






 – геометрический признак, равный отношению площади области локализации сигнала акустической эмиссии, полученной при минимальном и максимальном значениях порогового уровня, и площади перекрытия области локализации сигнала и кластера;
– геометрический признак, равный отношению площади области локализации сигнала акустической эмиссии, полученной при минимальном и максимальном значениях порогового уровня, и площади перекрытия области локализации сигнала и кластера; – площадь области локализации сигнала;
– площадь области локализации сигнала; – площадь перекрытия области локализации сигнала в кластере, если число сигналов в таком кластере превышает заданный порог по количеству акустических сигналов, то это соответствует наличию дефекта с координатами, равными координатам центра кластера.
– площадь перекрытия области локализации сигнала в кластере, если число сигналов в таком кластере превышает заданный порог по количеству акустических сигналов, то это соответствует наличию дефекта с координатами, равными координатам центра кластера.