Патент на изобретение №2332328
|
||||||||||||||||||||||||||
(54) ПОДВОДНОЕ ВИДЕОКРЫЛО
(57) Реферат:
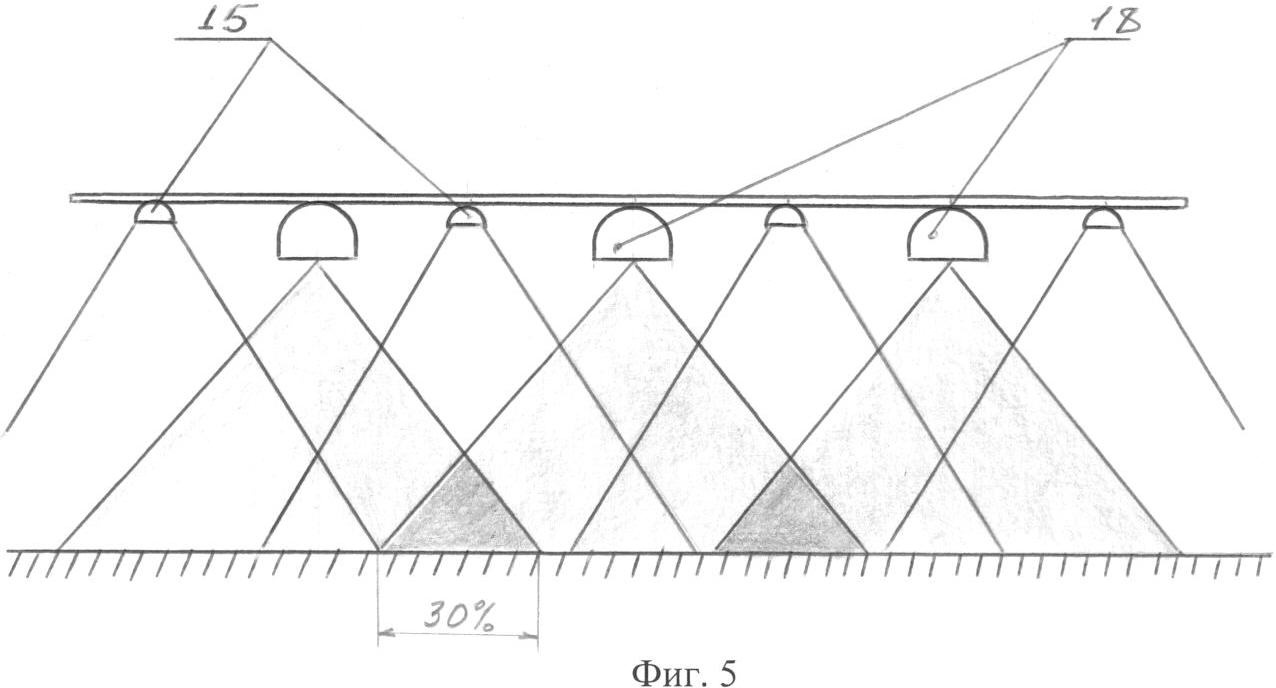
Изобретение относится к телевизионным системам для подводного обследования. Крыло содержит подводный исследовательский аппарат с закрепленной на нем фотовидеоаппаратурой, соединенной с видеоконтрольным устройством на пульте управления и снабженной электроприводом подъемно-опускного устройства. Крыло имеет плоское стреловидной формы стальное крыло, расположенное в его передней части с тремя вертикальными стабилизаторами, являющимися одновременно опорами конструкции, буксируемое через подъемно-опускные устройства на тросах плавсредством. На днище на одной вертикальной оси с приемником спутниковой геодезической станции расположен датчик промерного эхолота с диаграммой направленности. В секторе излучения расположены блок управления, корпус электродвигателя с винтом в насадке и две рейки для крепежа съемных грузов, прикрепленных к крылу. Между рейками расположены две направляющие, на которых размещены герметичные боксы с расположенными с обеих сторон подводными светильниками. Сектора видеообзора фотовидеоаппаратуры, установленной в герметичных боксах, взаимно перекрещены на обследуемой поверхности. Вся площадь видеообзора фотовидеоаппаратуры перекрыта секторами освещения светильников и двумя датчиками акустического сигнала положения плоскости крыла по отношению к обследуемой поверхности. Контроль, управление и передача информации в реальном времени осуществляется через многожильный кабель, соединяющий блок управления, видеоконтрольное устройство и пульт оператора. Достигается выполнение в условиях малой видимости панорамной макросъемки высокого качества. 6 з.п. ф-лы, 7 ил.
Изобретение относится к телевизионным системам для подводного обследования в условиях малой видимости и сложности рельефа дна, а также может быть использовано в системе контроля безопасности гидротехнических сооружений. Известна гидрооптическая аппаратура для обследования подводного объекта, которая содержит фотокамеру с объективом и водонепроницаемым корпусом, соединенным механически с импульсным осветителем, подключенным через синхроконтакт спускового механизма затвора фотокамеры к источнику питания и волоконно-оптический шумопеленгатор, выполненный в виде двух волоконно-оптических гидроакустических приемников, каждый из которых включает в себя идентичные сигнальные и опорные чувствительные оптические волокна с фазосдвигающим устройством. Эти приемники оптически связаны с когерентным источником света и фотоприемником в два интерферометра (патент RU №2193213, G01S 3/80, опубл. 20.11.2002 г.). Недостатком аналога является невозможность выполнения панорамной макросъемки в условиях малой видимости и отсутствие определения координат видимых элементов подводной поверхности с помощью спутниковых геодезических систем. Известна телевизионная система, включающая передающее устройство, которое содержит телевизионную передающую камеру и двухкоординатный сканирующий оптический локатор. В передающем устройстве формируются телевизионный сигнал и сигнал дальности объектов наблюдения. Видеосигнал в приемном устройстве наблюдается видеоконтрольным блоком, а сигнал дальности объектов наблюдения в блоке обработки дальномерного сигнала преобразуется в видеосигнал, который с помощью микшера вводится в изображение, наблюдаемое на экране видеоконтрольного блока. Микшер, содержащий блок последовательной по дальности выборки и перекодирования и блок наложения, вместе обеспечивают наложение на видеосигнал сигнала объектов, находящихся на определенном расстоянии от передающего устройства (патент RU №1816186, H04N 13/00, опубл. 09.08.1995 г.). Недостатком аналога является невозможность выполнения панорамной макросъемки в условиях малой видимости и отсутствие определения координат видимых элементов подводной поверхности с помощью геодезических спутниковых систем. Известна система обнаружения и исследования подводных объектов, содержащая подводный поисковый аппарат с закрепленной на нем телекамерой, соединенной с видеоконтрольным устройством на пульте управления. Телекамера и видеоконтрольное устройство установлены с возможностью поворота вокруг двух взаимно перпендикулярных осей в П-образных подвесах и снабжены датчиками углового положения. Телекамера снабжена электромеханическим приводом поворота, у которой вертикальная и горизонтальная оси вращения пересекают оптическую ось телекамеры в точке, принадлежащей диаметральной плоскости аппарата, а видеоконтрольное устройство шарнирно закреплено в двухстепенном подвесе посредством двух штанг, снабженных противовесами, при этом датчики углового положения одноименных осей видеоконтрольного устройства и телекамеры через вычитающее устройство соединены с электромеханическим приводом телекамеры (патент RU №1319444, B63G 8/38, опубл. 010.07.1996 г.). По наибольшему количеству сходных признаков и достигаемому при использовании результату данное техническое решение выбрано в качестве прототипа. Недостатками прототипа, как и аналогов, является невозможность выполнения панорамной макросъемки в условиях малой видимости и отсутствие определения координат видимых элементов подводной поверхности с помощью геодезических спутниковых систем. Технический результат, на достижение которого направлено заявляемое изобретение, состоит в выполнении в условиях малой видимости панорамной макросъемки высокого качества на большой площади с определением координат видимых элементов подводной поверхности с помощью спутниковых приемников. Для достижения указанного технического результата в подводном видеокрыле, содержащем подводный исследовательский аппарат с закрепленной на нем фотовидеоаппаратурой, соединенной с видеоконтрольным устройством на пульте управления и снабженной электроприводом подъемно-опускного устройства, плоское стреловидной формы стальное крыло расположено в его передней части, и имеет, по меньшей мере, три вертикальных стабилизатора, являющиеся одновременно опорами конструкции, буксируемая через подъемно-опускные устройства на тросах плавсредством, например, катером, на днище которого на одной вертикальной оси с приемником спутниковой геодезической станции расположен датчик промерного эхолота с диаграммой направленности при угле акустического сигнала Кроме того, заявленное техническое решение имеет факультативные признаки, характеризующие его частные случаи, а именно: фотовидеоаппаратура содержит безкорпусные видеокамеры сверхвысокой чувствительности и цифровые камеры с широкоугольными объективами и внешними вспышками для макросъемки. Датчики акустического сигнала расположены на концах плоскости плоского стреловидной формы стального крыла. Герметичные боксы защищены насадкой искусственной видимости, заполненной оптически чистой средой. Подводные светильники содержат комплекты галогенных ламп с регулируемым режимом вращения. Корпус подводных светильников имеет вытянутую форму с минимальным фронтальным сопротивлением набегающему водному потоку. Электродвигатель может быть установлен в горизонтальном положении и регулируя частоту вращения винта, а также поворотом вокруг вертикальной оси удерживать подводное видеокрыло при сильном встречном течении в секторе диаграммы направленности датчика промерного эхолота. Отличительным признаком предлагаемого изобретения от указанного выше известного, наиболее близкого к нему является то, что размещенная, таким образом в герметичных боксах фотовидеоаппаратура в комплекте с подводными светильниками, датчиком промерного эхолота и датчиками акустического сигнала положения плоскости плоского стреловидной формы стального крыла позволяет производить панорамное фотовидеодокументирование с использованием спутниковой геодезической системы позиционирования. Благодаря наличию этих признаков при работе подводного видеокрыла появляется возможность: – соблюдать условие площадной съемки и возможности получения панорамной макросъемки на заданной площади при изменяемой прозрачности воды, изменяя и фиксируя положение герметичных боксов и подводных светильников, а так же расстояния до обследуемой поверхности, – контролировать перемещение предлагаемого видеокрыла на заданном расстоянии параллельно обследуемой поверхности, расположенной под различными углами при помощи отображаемой на мониторе оператора информации о расстояниях между датчиками акустического сигнала, расположенных на концах плоскости плоского стреловидной формы стального крыла и подводной поверхностью, – производить осмотр горизонтальных и вертикальных поверхностей гидросооружений, – выполнять фотовидеосъемку при боковом течении при обследовании вертикальных поверхностей гидротехнических сооружений с помощью прижимного усилия от винта с насадкой работающего электродвигателя, – обследовать подводную поверхность с сильным встречным течением, – компенсировать влияние турбулентного потока изменяя вес съемных грузов, – создавать минимальное сопротивление набегающему потоку вытянутой вдоль направления движения подводного видеокрыла формой подводных светильников, освещая весь сектор видеообзора, – достигать оптимальное условие освещенности обследуемой поверхности, при изменении положения корпусов подводных светильников в вертикальной и горизонтальной плоскостях, последовательности и количества включенных или выключенных галогенных ламп, – обследовать подводный рельеф способом панорамной макросъемки при площадном обследовании на открытых и закрытых водоемах. Предлагаемое изобретение иллюстрируется чертежами, представленными на фиг.1-4. На фиг.1 показан общий вид подводного видеокрыла. На фиг.2 – схема использования подводного видеокрыла. На фиг.3 – схема контроля положения установки подводного видеокрыла в зоне сектора акустического охвата (h). На фиг.4 – схема контроля положения установки подводного видеокрыла вне зоны сектора акустического охвата (H). На фиг.5 – схема взаимного расположения герметичных боксов и подводных светильников. На фиг.6 – герметичные боксы в комплекте с насадками искусственной видимости с оптически чистой средой и На фиг.7 – подводные светильники вытянутой формы. Подводное видеокрыло (фиг.1) состоит из плоского стреловидной формы стального крыла 1 с вертикальными стабилизаторами 2, являющимися опорами 3 этого видеокрыла, подъемно-опускного устройства 4 с тросами 5, приемника 6 спутниковой геодезической станции, датчика 7 промерного эхолота, блока управления 8, электродвигателя 9, соединенного с насадкой 10 при помощи винта 11, реек 12 для крепления съемного груза 13, направляющей 14 с подводными светильниками 15, состоящими из корпуса 16 и галогенных ламп 17, герметичных боксов 18 с установленной в них фотовидеоаппаратурой и защищенных насадкой искусственной видимости 19, датчика 20 акустического сигнала положения плоскости плоского стреловидной формы стального крыла 1 и многожильного кабеля 21, соединяющего блок управления 8 и пульт оператора. Видеоконтрольное устройство выведено на монитор оператора. Работа подводного видеокрыла осуществляется следующим образом. При обследовании или панорамной макросъемке подводного рельефа с плавсредства, например, катера, опускают под воду с помощью подъемно-опускного устройства 4 с тросами 5 плоское стреловидной формы стальное крыло 1. Далее при захвате фотовидеоаппаратурой, установленной в герметичных боксах 18, на отрезке подводной поверхности интересующей информации и появлению ее в реальном времени на экране монитора оператора через дистанционное управление фотовидеоаппаратурой производится, не останавливая движение плавсредства, одновременная серийная фотосъемка с заданной скоростью и количеством кадров, этим достигается условие панорамной макросъемки на заданной площади. Датчик 7 промерного эхолота закреплен на днище плавсредства на одной вертикальной оси с приемником 6 спутниковой геодезической станции и блоком управления 8. Сектор охвата эхолота определяет положение буксируемого плоского стреловидной формы стального видеокрыла 1 в нормальных условиях. Плоские поверхности предлагаемого видеокрыла отражают посылаемый датчиком 7 промерного эхолота акустический сигнал и на экране монитора оператора высвечивается установленная глубина. Положение плоскости объективов фотовидеоаппаратуры относительно обследуемой поверхности контролируют датчики 20 акустического сигнала, расположенных на концах плоскости плоского стреловидной формы стального крыла 1, сигналы от которых передаются оператору. Это позволяет при движении плавсредства сохранять заданное расстояние от грунта при изменении угла наклона подводной поверхности. Форма плоского стреловидной формы стального крыла 1 и его расположение в передней части подводного видеокрыла определяется специфическими условиями работы в водной среде с малой видимостью и захламленностью дна вблизи гидротехнических сооружений. Для повышения качества передаваемого изображения производится замещение слоя воды малой прозрачности оптически чистой средой внутри насадки искусственной видимости 19, защищающей герметичные боксы 18 и подводные светильники 15. При отклонении конструкции предлагаемого видеокрыла за пределы сектора акустического охвата в результате сбойного течения на экране монитора оператора высвечивается измененная глубина (Н), отличная от расчетной (h), что свидетельствует о превышении допустимой погрешности в определении нахождения комплекса и отображаемых элементов обследуемой поверхности. В таких условиях процесс обследования приобретает дискретный характер. При обнаружении фотовидеоаппаратурой интересующей информации плоское стреловидной формы подводное видеокрыло 1 опускается на дно на три опоры 3 и в стационарном режиме выполняется фотофиксация участка обследуемой поверхности с определением координат. Низкая прозрачность воды определяет малую скорость движения плавсредства и небольшое расстояние между предлагаемым видеокрылом 1 и обследуемой поверхностью. Поэтому время перехода от динамики к статике очень мало и область фотозахвата практически совпадает с областью видеоизображения, что обеспечивает сохранение интересующей информации. При обследовании вертикальных поверхностей гидротехнических сооружений прижимное усилие от винта 11 с насадкой 10 электродвигателя 9 позволяет контролировать положение всего предлагаемого комплекса и осуществлять съемку при боковом течении. Таким образом, в отличие от прототипа, предлагаемое видеокрыло конструктивно обеспечивает выполнение условий панорамной макросъемки при площадном обследовании обеспечивая перекрытие между снимками маршрута не менее 25-30%, а также позволяет выполнять съемку в сильно заиленной среде на горизонтальной и вертикальной поверхностях; получать координаты снимаемых на подводной поверхности объектов с геодезической точностью; отображать информацию в реальном времени на экране монитора и в записи.
Формула изобретения
1. Подводное видеокрыло, содержащее подводный исследовательский аппарат с закрепленной на нем фотовидеоаппаратурой, соединенной с видеоконтрольным устройством на пульте управления и снабженной электроприводом подъемно-опускного устройства, отличающееся тем, что оно имеет плоское стреловидной формы стальное крыло, расположенное в его передней части, по меньшей мере, с тремя вертикальными стабилизаторами, являющимися одновременно опорами конструкции, буксируемое через подъемно-опускные устройства на тросах плавсредством, например катером, на днище которого на одной вертикальной оси с приемником спутниковой геодезической станции расположен датчик промерного эхолота с диаграммой направленности при угле акустического сигнала 2. Подводное видеокрыло по п.1, отличающееся тем, что фотовидеоаппаратура содержит безкорпусные видеокамеры сверхвысокой чувствительности и цифровые камеры с широкоугольными объективами и внешними вспышками для панорамной макросъемки в герметичных боксах. 3. Подводное видеокрыло по п.1, отличающееся тем, что датчики акустического сигнала расположены на концах плоскости плоского стреловидной формы стального крыла. 4. Подводное видеокрыло по п.1, отличающееся тем, что герметичные боксы защищены насадкой искусственной видимости, заполненной оптически чистой средой. 5. Подводное видеокрыло по п.1, отличающееся тем, что подводные светильники содержат комплекты галогенных ламп с регулируемым режимом освещения. 6. Подводное видеокрыло по п.1, отличающееся тем, что корпус подводных светильников имеет вытянутую форму с минимальным фронтальным сопротивлением набегающему водному потоку. 7. Подводное видеокрыло по п.1, отличающееся тем, что электродвигатель может быть установлен в горизонтальном положении, регулируя частоту ращения винта, а также поворотом вокруг вертикальной оси – удерживать подводное видео-крыло при сильном встречном течении в секторе диаграммы направленности датчика промерного эхолота.
РИСУНКИ
|
||||||||||||||||||||||||||
 =4÷6°, в секторе излучения которой расположены блок управления, корпус электродвигателя с винтом в насадке и, по меньшей мере, две рейки для крепежа съемных грузов, прикрепленные к плоскому стреловидной формы стальному крылу, между рейками расположены две направляющие, на которых размещены герметичные боксы с расположенными с обеих сторон подводными светильниками, таким образом, что сектора видеообзора фотовидеоаппаратуры, установленной в герметичных боксах, взаимно перекрещены на обследуемой поверхности не менее, чем на 30%, при этом вся площадь видеообзора фотовидеоаппаратуры перекрыта секторами освещения светильников, и не менее двух датчиков акустического сигнала положения плоскости плоского стреловидной формы стального крыла по отношению к обследуемой поверхности, а контроль, управление и передача информации в реальном времени осуществляется через многожильный кабель, соединяющий блок управления, видеоконтрольное устройство и пульт оператора.
=4÷6°, в секторе излучения которой расположены блок управления, корпус электродвигателя с винтом в насадке и, по меньшей мере, две рейки для крепежа съемных грузов, прикрепленные к плоскому стреловидной формы стальному крылу, между рейками расположены две направляющие, на которых размещены герметичные боксы с расположенными с обеих сторон подводными светильниками, таким образом, что сектора видеообзора фотовидеоаппаратуры, установленной в герметичных боксах, взаимно перекрещены на обследуемой поверхности не менее, чем на 30%, при этом вся площадь видеообзора фотовидеоаппаратуры перекрыта секторами освещения светильников, и не менее двух датчиков акустического сигнала положения плоскости плоского стреловидной формы стального крыла по отношению к обследуемой поверхности, а контроль, управление и передача информации в реальном времени осуществляется через многожильный кабель, соединяющий блок управления, видеоконтрольное устройство и пульт оператора.

 угла зрения фотовидеоаппаратуры.
угла зрения фотовидеоаппаратуры.