Патент на изобретение №2316021
|
||||||||||||||||||||||||||
(54) МНОГОКАНАЛЬНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ЛЕТАТЕЛЬНОГО АППАРАТА
(57) Реферат:
Изобретение относится к радиотехнике, а именно к многоканальным радиолокационным системам, размещаемым на летательных аппаратах. Техническим результатом является повышение пропускной способности РЛС и уменьшение времени обнаружения объектов, поскольку обеспечивается параллельный по пространству и одновременный по времени обзор всего телесного угла зоны обзора РЛС. Многоканальная радиолокационная система летательного аппарата содержит синхронизатор, процессор сигналов, процессор данных и индикатор, а также блок приемопередающих модулей с приводом блока, линзу Люнеберга, блок управления зоной обзора, при этом блок приемопередающих модулей содержит несколько приемопередающих модулей, число которых равно числу одновременно формируемых пространственных угловых каналов – лучей диаграммы направленности радиолокационной системы. Каждый приемопередающий модуль содержит передатчик, циркулятор, высокочастотный излучатель, приемник, аналого-цифровой преобразователь и блок управления режимами. Блок приемопередающих модулей установлен относительно линзы Люнеберга так, что апертуры высокочастотных излучателей приемопередающих модулей расположены на фокальной поверхности указанной линзы и привод блока приемопередающих модулей производит поворот этого блока вокруг линзы Люнеберга. 4 ил.
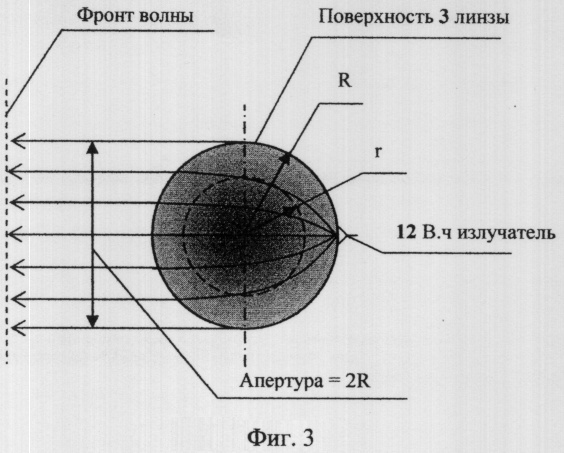
Изобретение относится к радиотехнике, а именно к многоканальным радиолокационным системам, размещаемым на летательных аппаратах. Многоканальные радиолокационные системы используются в тех случаях, когда необходимо в пределах заданной зоны обзора и за минимальное время надежно обнаруживать и определять с высокой точностью координаты многих объектов (целей) и отслеживать траектории их движения в реальном времени. Высокая угловая разрешающая способность достигается при использовании узкой диаграммы направленности антенны (ДНА), размеры которой значительно меньше угловой зоны обзора. Однако применение узкой ДНА для обнаружения и измерения координат всех целей, находящихся в зоне действия РЛС, приводит к необходимости разбиения зоны обзора на ряд угловых пространственных каналов и требует проведения обзора этого пространства. Для получения эффекта многоканальности РЛС возможно использование последовательного, параллельного и комбинированного способов обзора. В первом способе используют временное разделение каналов, когда имеется только одна радиолиния «передатчик – луч диаграммы направленности антенны – приемник», которая периодически и кратковременно активизируется в определенных направлениях для получения радиолокационной информации от нескольких целей, т.е. путем последовательного по времени просмотра (сканирования) лучом антенны всех участков заданной зоны обзора. Во втором способе используют одновременное получение данных о множестве целей с помощью РЛС, имеющей несколько одновременно существующих пространственно-разделенных каналов, перекрывающих всю зону обзора, т.е. несканирующих РЛС параллельного обзора. В комбинированном обзоре используют ДНА, состоящую из нескольких парциальных лучей, перекрывающих незначительную часть зоны обзора (см., например, [1]). Наибольшее распространение в настоящее время получили многоканальные РЛС с узким лучом ДНА, в которых зона обзора просматривается последовательно по жесткой программе работы механического привода с обнаружением целей и определением их координат «на проходе», т.е. во время прохождения их лучом. Такие системы обладают рядом недостатков. Во-первых, из-за дефицита времени они имеют недостаточную пропускную способность, т.е. могут обеспечить обнаружение и сопровождение только небольшого числа объектов. Во-вторых, они имеют достаточно большое время обнаружения объектов из-за больших интервалов между зондированиями, что снижает надежность выявления объектов, кратковременно находящихся в зоне обзора РЛС. Эти недостатки частично устранены в известной однолучевой многоканальной РЛС с временным разделением каналов и электронным управлением луча, приведенной в [2]: Ю.А.Шишов, В.А.Ворошилов. Многоканальная радиолокация с временным разделением каналов, М., Радио и связь, 1987, с.13-15. РЛС такого типа предназначена для слежения за целями, входящими в зону ее ответственности (зону обзора по угловым координатам и дальности), и содержит фазированную антенную решетку (ФАР), командное устройство системы управления лучом, процессор данных (ЭВМ управления и обработки данных), антенный переключатель «прием – передача», передатчик, приемник, процессор сигналов (устройство первичной обработки радиолокационной информации), индикатор. Эта РЛС имеет электронное управление лучом антенны по двум угловым координатам, что позволяет производить обзор пространства в любой последовательности, зондируя отдельные направления более длительное время, а другие направления не зондируя вообще, без потери времени на перемещение луча, т.к. луч антенны может быть направлен в любую точку пространства практически мгновенно. Это дает возможность организовать гибкие способы поиска и сопровождения целей. Последовательность обзора пространства по азимуту и углу места формируется по циклограмме в процессоре данных, который управляет командным устройством, где вырабатываются и передаются на фазовращатели ФАР команды управления фазовым распределением в излучающих элементах ФАР, после чего включается импульсное высокочастотное излучение передатчика для проведения зондирования заданного углового направления. Луч антенны удерживается в этом направлении определенное время, необходимое для накопления на всех интервалах дальности требуемого количества отраженных сигналов, которые с выхода приемника передаются в процессор сигналов, где их подвергают первичной обработке с последующим принятием решения о наличии или отсутствии эхо-сигнала от целей в данном направлении. Если эхо-сигнал от цели обнаружен, то координаты цели и время их получения запоминают в процессоре данных и переходят к зондированию следующего углового направления. После просмотра всей зоны обзора и выявления текущей целевой обстановки работа продолжается под управлением процессора данных в следующей последовательности: анализ координат целей, имеющихся в памяти, и выбор направления очередного зондирования, установка луча в этом направлении, проведение зондирования, обнаружение и измерение координат цели и их запоминание, экстраполяция положения цели для очередного зондирования. При работе по гибкой программе перемещения луча возможно обнаружение всех целей в заданной зоне обзора при низком темпе обновления информации и грубой оценке параметров целей, а также сопровождение небольшого числа целей при высоком темпе обновления информации о них и высокой точности оценки их параметров. Более рациональное распределение времени работы РЛС между обнаружением и сопровождением и возможность мгновенного переброса луча в любую точку зоны обзора увеличивают пропускную способность РЛС, однако средняя скорость перемещения луча ДНА уменьшается с ростом числа обнаруженных целей, что приводит к ограничению пропускной способности и снижает вероятность обнаружения и точность измерения параметров целей. Задачей предлагаемого технического решения является повышение пропускной способности РЛС и уменьшение времени обнаружения объектов. Решение указанной задачи достигается тем, что многоканальная радиолокационная система летательного аппарата, содержащая блок приемопередающих модулей, синхронизатор, процессор сигналов, процессор данных, индикатор, каждый приемопередающий модуль содержит передатчик, циркулятор, высокочастотный излучатель, приемник и аналого-цифровой преобразователь, при этом первый вход блока приемопередающих модулей подключен к первому выходу синхронизатора, выход блока приемопередающих модулей подключен к первому входу процессора сигналов, второй вход процессора сигналов подключен к второму выходу синхронизатора, первый и второй выходы процессора сигналов подключены соответственно к первому входу процессора данных и входу индикатора, в каждом приемопередающим модуле выход передатчика подключен к входному плечу циркулятора, антенное плечо циркулятора подключено к высокочастотному излучателю, выходное плечо циркулятора подключено к первому входу приемника, выход которого связан с первым входом аналого-цифрового преобразователя, первый вход передатчика, второй вход приемника и второй вход аналого-цифрового преобразователя являются первым входом приемопередающего модуля, выход аналого-цифрового преобразователя является выходом приемопередающего модуля, первые и вторые входы всех приемопередающих модулей подключены соответственно к первому и второму входами блока приемопередающих модулей, а выходы всех приемопередающих модулей составляют выход блока приемопередающих модулей, дополнительно содержит линзу Люнеберга, блок управления зоной обзора, привод блока приемопередающих модулей и в каждом приемопередающем модуле дополнительно установлен блок управления режимами, при этом блок приемопередающих модулей установлен относительно линзы Люнеберга так, что апертуры высокочастотных излучателей приемопередающих модулей расположены на фокальной поверхности указанной линзы и привод блока приемопередающих модулей производит поворот этого блока вокруг линзы Люнеберга по азимуту и углу места, третий вход процессора сигналов подключен к первому выходу процессора данных, второй и третий выходы процессора данных подключены соответственно к входу блока управления зоной обзора и к входу синхронизатора, выход блока управления зоной обзора подключен к входу привода блока приемнопередающих модулей, выход которого механически связан с блоком приемопередающих модулей, четвертый выход процессора данных подключен к второму входу блока приемопередающих модулей, второй вход процессора данных связан с пилотажно-навигационным комплексом летательного аппарата, в каждом приемопередающем модуле второй вход передатчика и третий вход приемника подключены соответственно к первому и второму выходам блока управления режимами, вход которого является вторым входом приемопередающего модуля, а вторые входы приемопередающих модулей подключены к второму входу блока приемопередающих модулей. На фиг.1 представлена блок-схема предлагаемой многоканальной радиолокационной системы летательного аппарата; на фиг.2 – блок-схема блока приемопередающих модулей; на фиг.3 – линза Люнеберга, на фиг.4 – схема совместного размещения блока приемопередающих модулей и линзы (в изометрии). Многоканальная радиолокационная система летательного аппарата содержит (фиг.1) блок приемопередающих модулей 1, содержащий N приемопередающих модулей 2, линзу Люнеберга 3, синхронизатор 4, индикатор 5, процессор сигналов 6, процессор данных 7, блок управления зоной обзора 8 и привод блока приемопередающих модулей 9. Каждый приемопередающий модуль 1 содержит (фиг.2) передатчик 10, циркулятор 11, высокочастотный излучатель 12, приемник 13, аналого-цифровой преобразователь 14 и блок управления режимами 15. Первый вход блока приемопередающих модулей 1 подключен к первому выходу синхронизатора 4, второй вход блока приемопередающих модулей 1 подключен к четвертому выходу процессора данных 7, выход блока приемопередающих модулей 1 связан с первым входом процессора сигналов 6, второй вход которого подключен к второму выходу синхронизатора 4. Третий вход процессора сигналов 6 подключен к первому выходу процессора данных 7, второй вход которого подключен к пилотажно-навигационному комплексу летательного аппарата, от которого поступает информация о текущем курсе, тангаже и крене ЛА. Первый и второй выходы процессора сигналов 6 подключены соответственно к первому входу процессора данных 7 и индикатору 5. Второй выход процессора данных 7 через блок управления зоной обзора 8 подключен к входу привода 9 блока приемопередающих модулей, который механически связан с блоком приемопередающих модулей 1. Третий выход процессора данных 7 подключен к входу синхронизатора 4. В каждом приемопередающем модуле 2 (фиг.2) выход передатчика 10 подключен к входному плечу циркулятора 11, антенное плечо циркулятора 11 подключено к высокочастотному излучателю 12, выходное плечо циркулятора 11 подключено к первому входу приемника 13, выход которого связан с первым входом аналого-цифрового преобразователя 14, первый вход передатчика 10, второй вход приемника 13 и второй вход аналого-цифрового преобразователя 14 являются первым входом приемопередающего модуля 2, второй вход передатчика 10 и третий вход приемника 13 подключены соответственно к первому и второму выходам блока управления режимами 15, вход которого является вторым входом приемопередающего модуля 2, выход аналого-цифрового преобразователя 14 является выходом приемопередающего модуля 2. В блоке приемопередающих модулей 1 первые и вторые входы всех приемопередающих модулей 2 подключены соответственно к первому входу и второму входу блока приемопередающих модулей 1, а выходы приемопередающих модулей 2 составляют выход блока приемопередающих модулей 1. Функциональное построение блоков 4, 6, 7, 8 будет раскрыто далее при описании работы радиолокационной системы. Предлагаемая многоканальная радиолокационная система работает следующим образом. С 1-го выхода синхронизатора 4 на 1-й вход блока приемопередающих модулей 1 подаются три вида сигналов: первый – это импульсные сигналы с высокочастотным заполнением для запуска передатчиков 10 приемопередающих модулей 2 (ППМ), второй – сигналы частоты гетеродина и сигналы опорной частоты фазовых детекторов приемников 13 ППМ, третий – периодические импульсные сигналы для запуска аналого-цифровых преобразователей 14 (АЦП) ППМ. В блоке ППМ 1 импульсные высокочастотные сигналы по цепи 1-1 поступают на 1-й вход каждого ППМ 2, который является входом передатчика 10. В передатчике эти сигналы усиливаются и в качестве зондирующих сигналов подаются на входное плечо циркулятора 11, который обеспечивает их прохождение через него только на высокочастотный излучатель 12, который является облучателем линзы Люнеберга 3 и апертура которого расположена на фокальной ее поверхности. Линза Люнеберга 3 (фиг.3) представляет собой сферу из диэлектрического материала с переменным коэффициентом преломления. Она обеспечивает преобразование сферической электромагнитной волны излучателя, расположенного на ее фокальной поверхности, в электромагнитную волну с плоским фронтом, распространяющимся вдоль диаметра, проходящего через излучатель (см., например, [3]). Показатель преломления линзы n(r) должен соответствовать следующей зависимости
где r – расстояние между центром и текущим слоем линзы; nR – показатель преломления на поверхности линзы, т.е. при r=R; R – радиус линзы. Показатель преломления nR обычно выбирается близким 1, что позволяет снизить отражения от поверхности линзы. Размещение на поверхности шара N излучателей позволяет получить многолучевую диаграмму направленности, каждый луч которой обеспечивают работу по одному из N пространственных каналов. Для оценки диаграммы направленности сферической линзы Люнеберга 3 ее можно заменить плоской круглой апертурой радиуса, равного радиусу линзы, а распределение поля по раскрыву (апертуре) принять близким к равномерному. Тогда ширину диаграммы направленности луча
где D=2R. Например, при D=50 см, РЛС, предназначенные для работы в передней полусфере летательных аппаратов, имеют зону обзора, которая составляет по азимуту
Каждый излучатель, формирующий один луч диаграммы направленности РЛС, является элементом одного ППМ, поэтому для формирования многолучевой диаграммы на поверхности линзы необходимо разместить соответствующее число облучателей. При этом, если
Известные образцы аналогичных приемопередающих модулей, используемых, например, в активных фазированных антенных решетках и выполненных на микросхемах в диапазоне волн 3 см [5], имеют со стороны расположения излучателей размеры около 1,1×1,1=1,21 см2, что показывает возможность размещения требуемого числа ППМ на четверти поверхности сферы диаметром 50 см для реализации параллельного обзора углового сектора в пределах Блок ППМ 1 (фиг.4) представляет собой кассету, содержащую N приемопередающих модулей 2, излучатели которых расположены на внутренней стороне кассеты, имеющей сферическую форму, т.е. обращены в сторону линзы 3. Внутренняя сторона блока ППМ 1 и поверхность линзы 3 имеют минимальный зазор. Блок ППМ 1 жестко закреплен на внутренней раме 16 карданного подвеса, которая установлена внутри внешней рамы 17. Линза 3 жестко укреплена на основании, связанном с несущими конструктивными элементами ЛА, а блок ППМ 1 может поворачиваться вокруг нее по горизонтали (по углу азимута) и по вертикали (по углу места) с помощью привода 9 блока ППМ, что позволяет производить установку зоны обзора РЛС в более широких пределах, чем зона параллельного обзора. Подключение блока ППМ 1 к другим электронным блокам РЛС производится гибкими соединителями. Таким образом, зондирующие сигналы одновременно излучаются по N угловым каналам. Отраженные от цели радиосигналы принимаются соответствующим лучом диаграммы направленности РЛС, фокусируются линзой 3 на излучателе ППМ этого канала и поступают через антенное плечо циркулятора 11 на его выходное плечо и далее на 1-й вход приемника 13. Приемник 13 содержит последовательно включенные малошумящий усилитель, смеситель, усилитель промежуточной частоты и фазовый детектор, с помощью которых принятый каналом ответный сигнал усиливается по высокой частоте, преобразуется на промежуточную частоту, усиливается на промежуточной частоте и детектируется. На 2-й вход приемника 13 по входным цепям 1-2 ППМ 2 поступают сигнал гетеродина и опорный сигнал промежуточной частоты фазовых детекторов. Видеосигналы с выхода приемника 13 подаются на 1-й вход аналого-цифрового преобразователя 14, где они подвергаются дискретизации по времени и амплитуде. Импульсные сигналы для запуска АЦП 14 поступают по входной цепи 1-3 ППМ 2. Принятые сигналы в цифровой форме поступают с выхода АЦП 14 на выход соответствующего ППМ 2 и далее через выход блока ППМ 1 на 1-й вход процессора сигналов 6. В процессоре сигналов 6 производят накопление, свертку, пороговую обработку выходных сигналов каждого приемопередающего модуля 2, а также дальномерные и доплеровские измерения принятого эхо-сигналов, в результате которых определяют такие параметры всех целей, как их координаты и радиальная скорость, в текущем временном кадре обработки радиолокационной информации (кадре обзора). Цифровая обработка сигналов в процессоре 6 производится в соответствии с алгоритмами, изложенными в [7, с.35-107]. С 1-го выхода процессора сигналов 6 цифровые данные о параметрах цели, полученные в каждом кадре обзора, передаются в процессор данных 7, где по нескольким кадрам обзора производят завязку трассы цели, уточняют ее координаты и скорость в соответствии с алгоритмами, изложенными в [7, с.108-186]. Кроме того, процессор сигналов 6 формирует видеоинформацию о целях, предназначенную для отображения на индикаторе 5 в каждом кадре обзора. Процессор сигналов 6 может быть реализован, например, на специализированной комбинированной многопроцессорной ЭВМ (многомашинному комплексу) для обработки радиолокационных сигналов и для решения задач управления в реальном масштабе времени типа «Багет-55-04» [6, с.19]. Эта ЭВМ состоит из программируемого процессора сигналов и управляющего вычислительного устройства, объединенных общей магистралью цифрового обмена, а также имеет модули интерфейса для внешнего обмена информацией. Эта ЭВМ имеет также графический контроллер, с помощью которого цифровая информация о координатах целей преобразуется в видеоинформацию и выдается через второй выход процессора сигналов 6 на вход индикатора 5. Процессор данных 7 управляет также работой процессора сигналов 6, блока управления зоной обзора 8, режимами работы блока ППМ 1 и синхронизатора 4 в различных режимах работы радиолокационной системы ЛА, а также выдает данные для работы процессора сигналов 6 и блока управления зоной обзора 8 с учетом данных пилотажно-навигационного комплекса ЛА (ПНК) о параметрах траектории движения ЛА, таких как курс, крен, тангаж, и команд от информационно-управляющего поля кабины ЛА, таких как команды начальной установки или изменения углового положения центра зоны параллельного обзора по азимуту и углу места, что обеспечивает начальную установку зоны обзора РЛС экипажем ЛА и пространственную стабилизацию зоны обзора при эволюциях ЛА. Процессор данных 7 может быть реализован, например, на ЭВМ для управления объектами в реальном масштабе времени типа «Багет-53» [7, с.13]. Эта ЭВМ состоит из процессора, оперативного и репрограммируемого запоминающих устройств, модулей интерфейса для обмена информацией с внешними устройствами бортовой радиоэлектронной аппаратуры ЛА по стандарту ARINC 429 и по стандарту MIL STD 1553 В, объединенных общей магистралью цифрового обмена. Эта ЭВМ имеет открытую архитектуру и может содержать модуль параллельного интерфейса по ГОСТ 26765.51-86 для обмена информацией с другими блоками РЛС. Обнаруженные цели в виде яркостных отметок отображаются в прямоугольных координатах на экране индикатора 5, который представляет собой устройство отображения телевизионного типа, например цифровой дисплей. По изображению на экране анализируют радиолокационную информацию, т.е. отметки целей. Одновременно с радиолокационной информацией процессор сигналов 6 формирует и выдает на индикатор 5 дополнительную информацию, такую как шкала дальности, символы подвижных целей, буквенно-цифровые сообщения о режиме работы аппаратуры, текущие пилотажные и навигационные параметры летательного аппарата. Процессор данных 7 вырабатывает и выдает через 2-й выход цифровые данные в блок управления зоной обзора 8 по азимуту и углу места, в котором они преобразуются в аналоговые сигналы, поступающие затем на привод 9 блока 1 ППМ. Блок ППМ начинает поворачиваться исполнительными элементами привода 9 таким образом, чтобы зона обзора РЛС заняла заданное положение. Процессор данных 7 выдает через 4-й выход на 2-й вход блока ППМ 1 адресные цифровые сигналы управления режимом работы каждого ППМ 2, которые поступают через 2-й вход ППМ 2 на вход блока управления режимами 15. Эти сигналы декодируются блоком управления 15 в команды управления передатчиком 10, на который они подаются через его 2-й вход с 1-го выхода блока управления режимами 15, и в команды управления приемником 13, на который они подаются через его 3-й вход с 2-го выхода блока управления режимами 15. С помощью этих команд обеспечивается управление мощностью передатчика и чувствительностью приемника. Синхронизирующее устройство 4 обеспечивает синхронную работу составных частей системы наведения и содержит задающий генератор с кварцевой стабилизацией частоты и управляемый синтезатор частот, который может быть, например, реализован в соответствии с [8]. Высокостабильные гармонические колебания от задающего генератора подаются на сигнальный вход синтезатора частот.С выходов синтезатора сигналов, которые одновременно являются выходами синхронизирующего устройства 4, выдаются с 1-го выхода на 1-й вход блока ППМ 1 – периодические импульсные сигналы со стабильным высокочастотным заполнением для передатчиков 10 ППМ, сигналы гетеродина приемников 13 ППМ и опорных сигналов промежуточной частоты для фазовых детекторов приемников, периодические импульсные сигналы для запуска АЦП, со 2-го выхода на 2-й вход процессора сигналов 6 – периодические импульсные тактовые сигналы синхронизации. На управляющий вход синхронизатора 4 с 3-го выхода процессора данных 7 поступают сигналы управления режимами работы, что позволяет управлять длительностью и периодом повторения зондирующих импульсов, а также изменять несущую частоту. Пропускная способность радиолокационной системы с N параллельными каналами равна числу этих каналов N, а для системы с временным разделением каналов – числу просмотренных в единицу времени (секунду) угловых секторов, в каждом из которых производится зондирование в течение времени tобн, т.е. величине 1/tобн. Выигрыш по пропускной способности в предлагаемой системе можно оценить по формуле ВПС=N·tобн. Значение tобн выбирается из условия надежного обнаружения цели за это время и составляет обычно tобн=0,01-0,03 с. Следовательно, при N Таким образом, предлагаемая многоканальная радиолокационная система летательного аппарата обеспечивает существенный выигрыш по пропускной способности и времени обнаружения целей за счет параллельного по пространству и непрерывного по времени обзора зоны ответственности РЛС многолучевой диаграммой направленности, полностью перекрывающей указанную зону. Этим повышается вероятность обнаружения и сопровождения большого числа целей, в том числе малозаметных и кратковременно находящихся в зоне ответственности РЛС.Кроме того, имеется возможность значительного повышения темпа обновления информации о пространственном положении целей, что позволяет повысить точность слежения за их траекториями. Источники информации 1. В.Н.Ветлинский, Г.Н.Ульянов. Многоцелевые РЛС. М., – Воениздат, 1975, с 27-30. 2. Ю.А.Шишов, В.А.Ворошилов. Многоканальная радиолокация с временным разделением каналов. М., Радио и связь, 1987, с.13-15. 3. A.З.Фрадин. Антенно-фидерные устройства. М., Связь, 1977, с 336, 337. 4. Справочник по радиолокации. Под ред. М.Сколника, том 2. М., Советское радио, 1977, с. 61. 5. Активные фазированные антенные решетки. Под ред. Д.И.Воскресенского и А.И.Канащенкова. М., Радиотехника, 2004, с 25-31. 6. Багет-семейство ЭВМ для специальных применений. Каталог продукции конструкторского бюро «Корунд-М» издание 3, М., 2000 г. 7. С.З.Кузьмин. Основы проектирования систем цифровой обработки радиолокационной информации. М., Радио и связь, 1986, с. 35-186. 8. А.В.Рыжков, В.Н.Попов. Синтезаторы в технике радиосвязи. М., Радио и связь, 1991, с. 62-74, 110-133.
Формула изобретения
Многоканальная радиолокационная система летательного аппарата, содержащая блок приемо-передающих модулей, синхронизатор, процессор сигналов, процессор данных, индикатор, каждый приемо-передающий модуль содержит передатчик, циркулятор, высокочастотный излучатель, приемник и аналого-цифровой преобразователь, при этом первый вход блока приемо-передающих модулей подключен к первому выходу синхронизатора, выход блока приемо-передающих модулей подключен к первому входу процессора сигналов, второй вход процессора сигналов подключен к второму выходу синхронизатора, первый и второй выходы процессора сигналов подключены соответственно к первому входу процессора данных и входу индикатора, в каждом приемо-передающем модуле выход передатчика подключен к входному плечу циркулятора, антенное плечо циркулятора подключено к высокочастотному излучателю, выходное плечо циркулятора подключено к первому входу приемника, выход которого связан с первым входом аналого-цифрового преобразователя, первый вход передатчика, второй вход приемника и второй вход аналого-цифрового преобразователя являются первым входом приемо-передающего модуля, выход аналого-цифрового преобразователя является выходом приемо-передающего модуля, первые и вторые входы всех приемо-передающих модулей подключены соответственно к первому и второму входам блока приемо-передающих модулей, а выходы всех приемо-передающих модулей составляют выход блока приемо-передающих модулей, отличающаяся тем, что она дополнительно содержит линзу Люнеберга, блок управления зоной обзора, привод блока приемо-передающих модулей и в каждом приемо-передающем модуле дополнительно установлен блок управления режимами, при этом блок приемо-передающих модулей установлен относительно линзы Люнеберга так, что апертуры высокочастотных излучателей приемо-передающих модулей расположены на фокальной поверхности указанной линзы и привод блока приемо-передающих модулей производит поворот этого блока вокруг линзы Люнеберга по азимуту и углу места, третий вход процессора сигналов подключен к первому выходу процессора данных, второй и третий выходы процессора данных подключены соответственно к входу блока управления зоной обзора и к входу синхронизатора, выход блока управления зоной обзора подключен к входу привода блока приемо-передающих модулей, выход которого механически связан с блоком приемо-передающих модулей, четвертый выход процессора данных подключен к второму входу блока приемо-передающих модулей, второй вход процессора данных связан с пилотажно-навигационным комплексом летательного аппарата, в каждом приемо-передающем модуле второй вход передатчика и третий вход приемника подключены соответственно к первому и второму выходам блока управления режимами, вход которого является вторым входом приемо-передающего модуля, а вторые входы приемо-передающих модулей подключены к второму входу блока приемо-передающих модулей.
РИСУНКИ
|
||||||||||||||||||||||||||

 , создаваемого точечным излучателем, можно рассчитать по формуле [4]:
, создаваемого точечным излучателем, можно рассчитать по формуле [4]:
 – длина волны,
– длина волны, г=±60° и
г=±60° и 

 600 получаем ВПС
600 получаем ВПС