Патент на изобретение №2310909
|
||||||||||||||||||||||||||
(54) ЛЕТНО-МОДЕЛИРУЮЩИЙ ПИЛОТАЖНЫЙ КОМПЛЕКС
(57) Реферат:
Изобретение относится к области авиационной техники и может быть использовано для отработки бортового и наземного оборудования при исследовании и создании аппаратно-программных средств и методов обнаружения и предупреждения потенциально конфликтных ситуаций в воздушном пространстве, отработки алгоритмов и индикации обеспечения группового полета самолетов, для подготовки и тренировки летного состава при выполнении полета строем, дозаправки самолетов в воздухе, киносъемки опытного самолета. Технический результат – повышение безопасности отработки элементов системы СНН/ОВД для воздушного пространства с высокой интенсивностью полетов, получение оценок функционирования бортового и наземного оборудования, дающего возможность определить потенциально конфликтные ситуации в воздушном пространстве. Летно-моделирующий пилотажный комплекс (ЛМПК) содержит наземную часть и бортовую часть – самолет «летающая – лаборатория» (ЛЛ). В наземную часть ЛМПК введен вычислитель автоматического зависимого наблюдения (АЗН) для отработки режима автоматического зависимого наблюдения вещательного типа (АЗН-В). В пилотажно-моделирующий стенд наземной части введены вычислитель вида с борта ЛЛ, вычислитель вида с двух бортов. В бортовую часть ЛЛ введены вычислитель формирования сигналов управления (ФСУ) для пилотирования по электронной индикации в зависимости от программного обеспечения и вычислитель сбора и обработки сигналов (СОС). В бортовой части два входа вычислителя ФСУ подключены, соответственно, к выходам приемника спутниковой навигационной системы бортовой части, системы АЦП бортовой части. Выходы вычислителя ФСУ и приемника СНС подключены к входам вычислителя СОС, выходы которого соединены с входом жидко-кристаллического экрана-индикатора для отображения летчику пилотажно-навигационной информации при пилотировании и контроле параметров полета и радиомодема линии передачи данных (ЛПД) бортовой части УКВ-диапазона для организации цифровой ЛПД по тракту «земля-борт-земля». 6 ил.
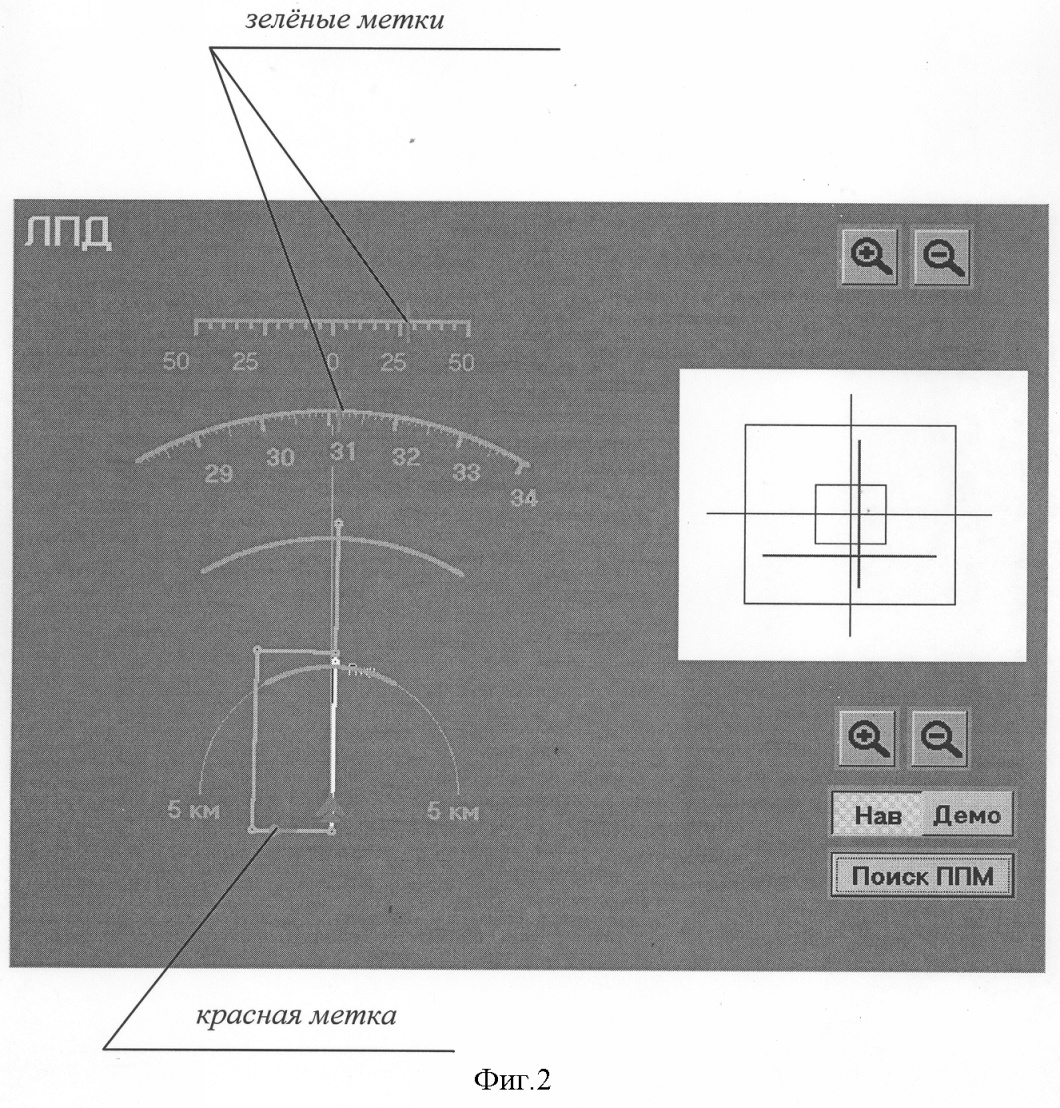
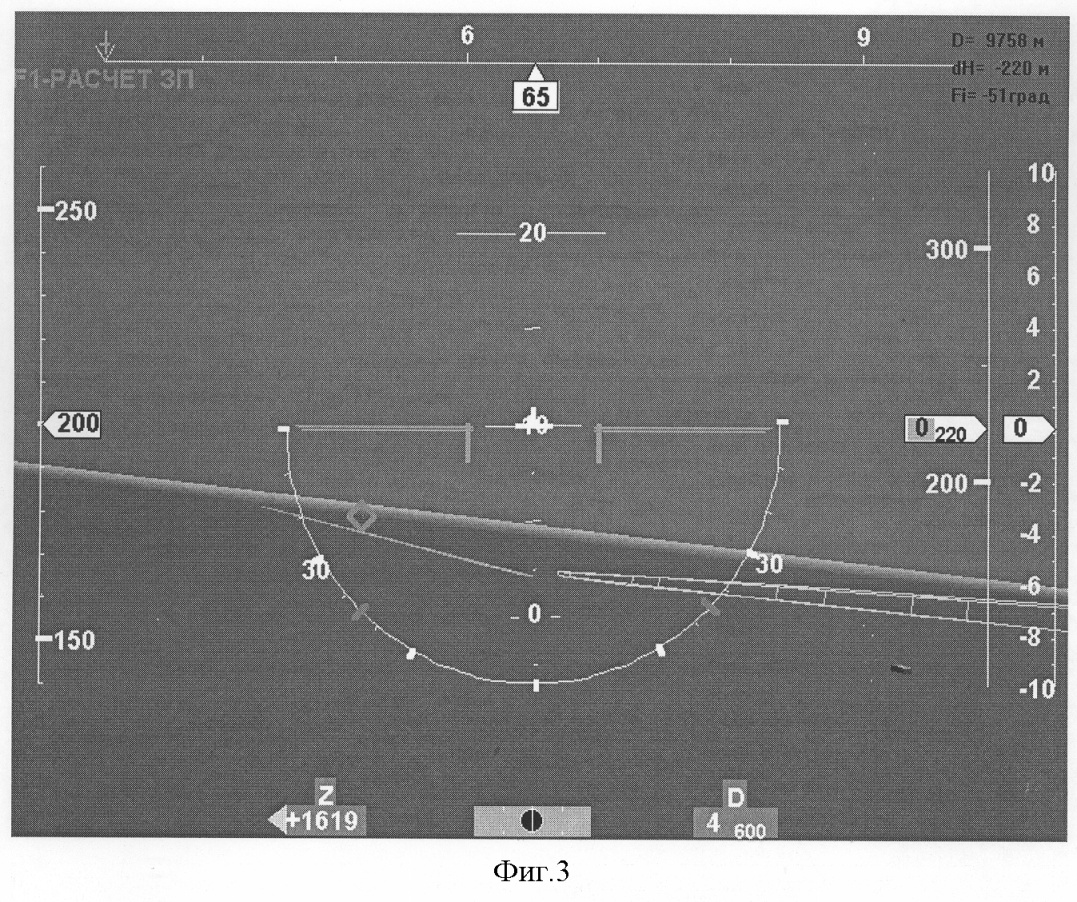
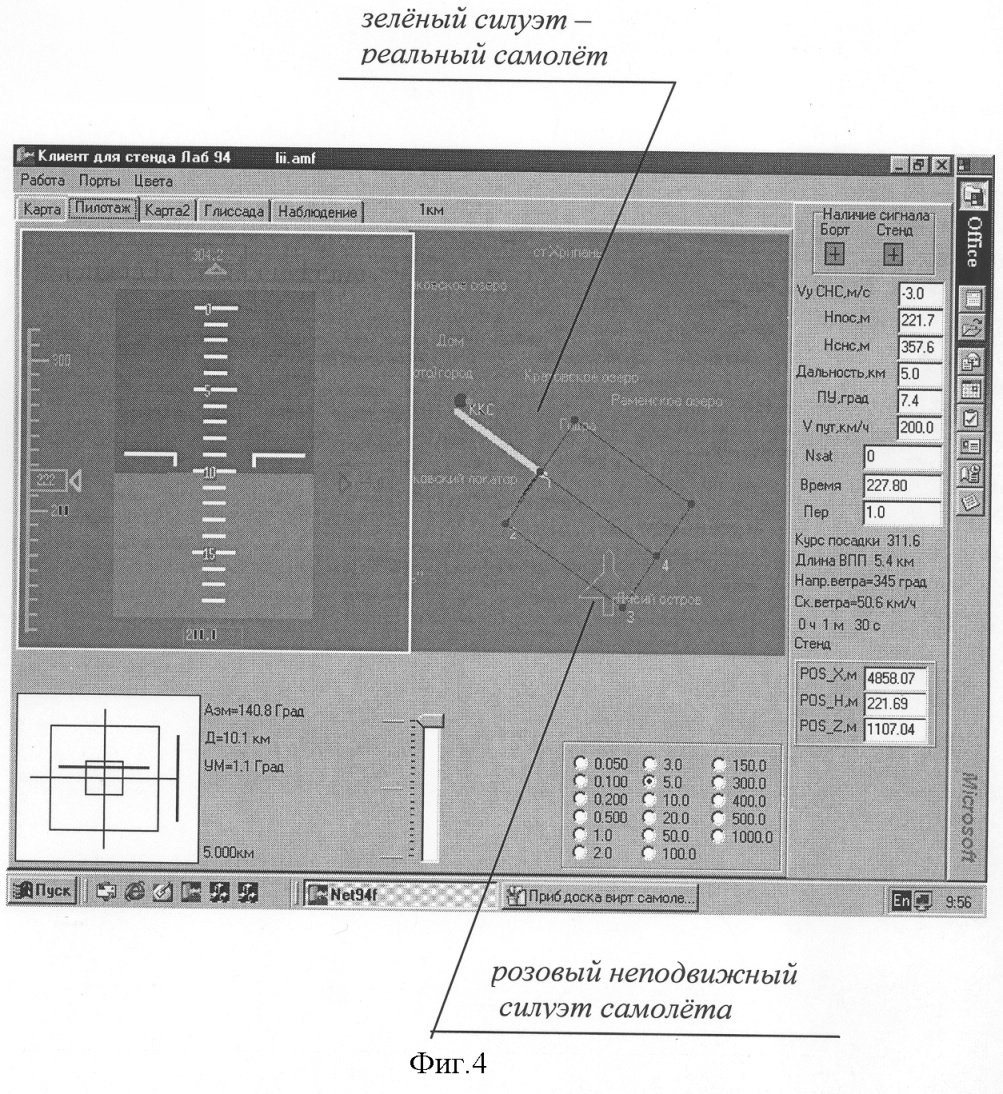
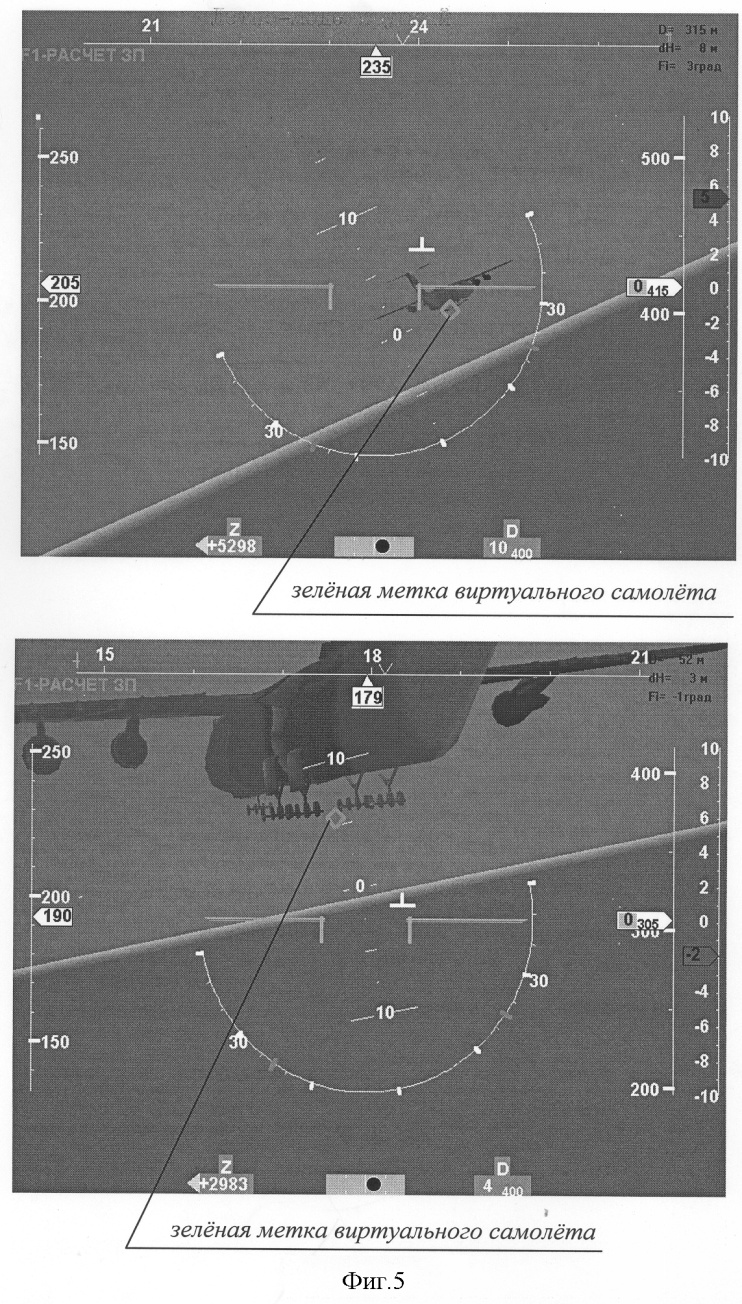
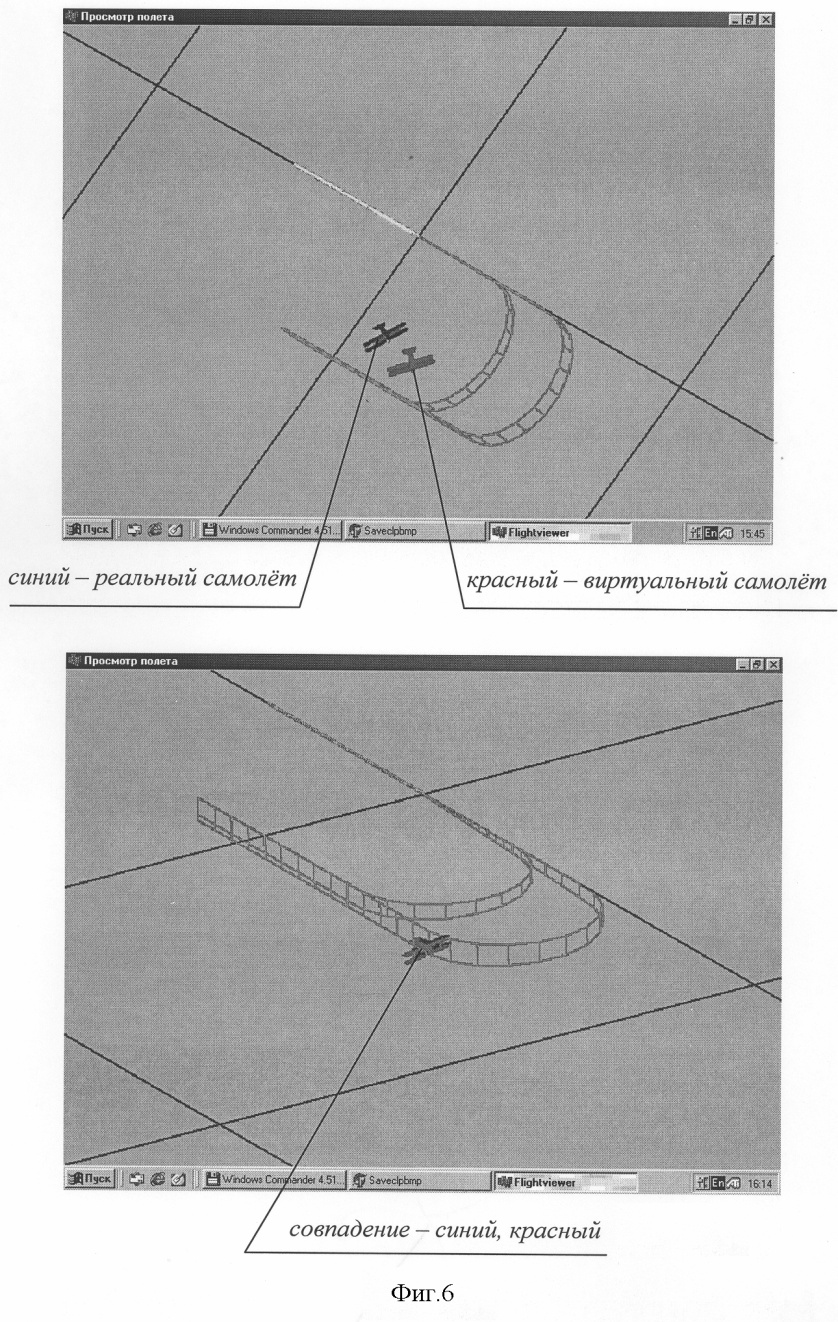
Изобретение относится к области авиационной техники и может быть использовано для отработки бортового и наземного оборудования при исследовании, создании аппаратно-программных средств и методов обнаружения, предупреждения потенциально конфликтных ситуаций в воздушном пространстве, отработки алгоритмов и индикации обеспечения группового полета самолетов. Кроме того, комплекс может быть использован для подготовки и тренировки летного состава при выполнении полета строем, дозаправки самолетов в воздухе, киносъемки опытного самолета. Уровень техники Известен летно-тренировочный комплекс, см. патент РФ на полезную модель №16135 7 B64G 7/00 авторов Васильченко К.К., Цыплакова В.В., Ситникова В.П. и др. от 25.05.99 г., включающий средства для внешнетраекторных и радиотелеметрических измерений, систему внешнетраекторных измерений (ВТИ), диотехнические средства (РТС), посадочный радиолокационный комплекс (ПРЛК), радиотехническую систему ближней навигации (РСБН), инструментальную систему посадки (ИЛС), микроволновую систему посадки (МЛС), систему телевизионной посадки (ТСП), спутниковую навигационную систему (СНС), систему управления воздушным движением (УВД) с пультом управления, пультом управления средствами связи, спутниковую систему связи (ССС), систему управления летным экспериментом (СУЛЭ), связанную с экраном моделирования динамики воздушного движения судна, летательного аппарата (ЛА), средства навигации, оборудованную взлетно-посадочную полосу (ВПП) со средствами обеспечения полетов, самолет-лабораторию. Однако данный комплекс не позволяет отрабатывать методы и средства обнаружения и предотвращения конфликтных ситуаций в воздушном пространстве зоны аэродрома. Известен летно-тренировочный комплекс группового обучения, см. патент на полезную модель РФ №29901, 7 В64F 5/00 от 24.12.2002 г. авторов Калинина Ю.И., Ушакова Ю.Е. и др., включающий средства для внешнетраекторных и радиотелеметрических измерений, систему внешнетраекторных измерений (ВТИ), радиотехнические средства (РТС), посадочный радиолокационный комплекс (ПРЛК), радиотехническую систему ближней навигации (РСБН), инструментальную систему посадки (ИЛС), микроволновую систему посадки (МЛС), систему телевизионной посадки (СТП), спутниковую навигационную систему (СНС), систему управления воздушным движением (УВД) с пунктом управления, пульт управления средствами связи, спутниковую систему связи (ССС), связную систему управления летным экспериментом (СУЛЭ), связанную с электронной вычислительной машиной (ЭВМ) моделирования динамики воздушного судна (ВС), средства навигации, оборудованную взлетно-посадочную полосу (ВПП) со средствами обеспечения полетов, самолет-носитель со средствами измерений, навигации, связи и обработки отображения информации, вычислительный центр обработки результатов летных испытаний с процессором (ЭВМ) обработки результатов измерений, самолет-аналог, комплекс оборудования центрифуги, системы со своими ЭВМ обработки результатов измерений, включающий собственно механизм центрифуги с кабинами летчиков и приводами, органы управления (в кабинах) и контроля перегрузки, имитаторы визуальной ориентировки, системы жизнеобеспечения, аппаратуру медицинского контроля, системы жизнеобеспечения, связанные с пультом управления центрифуги, который в свою очередь, связан с пультом инструктора СУЛЭ, связанные в единую локальную сеть. Однако данный комплекс не позволяет проводить отработку бортового и наземного оборудования при групповом полете, оценивать интенсивность движения воздушных судов в районе аэродромов, определять в них положение воздушных трасс местных воздушных линий. Известен летно-испытательный комплекс самолетов и бортового оборудования, см. Свидетельство РФ на полезную модель №8812, 6 G05D 1/00 авторов Кабачинского В.В., Харина Е.Г. и др. от 05.02.98 г., включающий средства для внешнетраекторных и радиотехнических измерений – радиоиспытательный комплекс (РИК), систему внешнетраекторных измерений (ВТИ), радиотехнические системы (РТС), посадочный радиолокационный комплекс (ПРЛК), радиотехническую систему ближней навигации (РСБН), инструментальную систему посадки (ИЛС), микроволновую систему посадки (МЛС), систему телевизионной посадки (СТП), спутниковую навигационную систему (СНС) с самолетом- эталоном и самолетом облета РТС, систему управления воздушным движением (УВД) с пунктом управления, пультом управления средствами связи, спутниковую систему связи (ССС), связную систему управления летным экспериментом, средства навигации, оборудованную взлетно-посадочную полосу (ВПП) со средствами обеспечения полетов, самолет-лабораторию со средствами измерений навигации, связи и обработки отображения информации, вычислительный центр обработки результатов летных испытаний с процессором (ЭВМ), наземные исследовательские стенды бортовых систем и характеристик самолетов со своими мини-ЭВМ обработки результатов измерений: стенд определения эффективной площади рассеяния, стенд связи, совместимый со спутниковой системой, связанный с имитатором помех, стенд электромагнитной совместимости, стенд молниезащиты, стенд моделирования динамики воздушного судна, стенд – геофотополигон, а центральный процессор обработки результатов летных испытаний вычислительного центра связан с мини-ЭВМ обработки результатов наземных стендов и систем в локальную вычислительную сеть. Однако данный комплекс не позволяет оценивать плотность и интенсивность движения летательных аппаратов (ЛА) в воздушном пространстве аэродрома, методов разрешения конфликтных ситуаций при групповом полете. Известна работа корпорации «Боинг» и федерального агентства (FAA) США, продемонстрировавшая возможности технологии спутниковых систем управления УВД в регионах без использования данных радиолокации и радиосвязи, см. 4th Integrated CNS Technologies Conference & Workshop Global Communications, Navigation and Surveillance Systems Program. Progress and Plans, Gulf of Mexico, Nov.17. 2003. Проведенные три испытательных полета показали повышение эффективности и уровня безопасности в маршрутах над океаническим регионом без использования радиолокаторов и радиосвязи. Использование спутниковых технологий показало преимущество точного наблюдения и управления при полетах воздушных судов (ВС) В-737 в таких областях земного шара. Данные летных испытаний и моделирования были получены в реальном масштабе времени в 7 центрах УВД, общий контроль осуществлялся из Хьюстона. Данная сложная система обеспечивала общую картину моделирования воздушного графика. Отработанная система наблюдения и связи позволяла направлять ВС вокруг моделируемых участков погоды днем и ночью. Наземная имитация управления пилотов моделируемых ВС позволяла изменить воздушные трассы испытываемых самолетов. В программе рассмотрены три основные составляющие: анализ интегрированной системы, включая общую структуру построения, переходные процессы в системе, аппаратные задачи моделирования путем обмена текстовыми данными. Программа позволила проанализировать методы и критерии для прокладывания воздушных трасс, отработать концепцию системы автоматического зависимого наблюдения, оценить возможности избежать критических ситуаций в Северном регионе США. Однако данная система не обеспечивает имитацию высокой плотности воздушного движения и конфликтных ситуаций в воздушном пространстве УВД. Известен патент РФ, взятый за прототип, №225/663 от 09.10.2003 г. Бекишева А.В., Жукова А.В. и др. «Интегрированный пилотажно-навигационный комплекс летательного аппарата», содержащий инерциальную навигационную систему, спутниковую навигационную систему автоматизированного зависимого наблюдения (АЗН-В), датчики системы воздушных параметров, вычислительную систему, систему ввода данных и команд управления, соединенную с вычислительной системой, многофункциональную систему индикации и сигнализации, концентратор, компьютер, шину обмена данными, адаптеры, интерфейсные модули, приводы и датчики системы управления полетом, приводы и датчики системы управления вектором тяги силовой установки и датчики бортовых систем. Пилотажно-навигационный комплекс выполнен на основе единых аппаратных и программно-вычислительных средств, обеспечивающих навигацию, управление контроля и оценки состояния бортовых систем и агрегатов летательного аппарата (ЛА) в процессе эксплуатации. Использование комплекса позволяет проводить летные испытания бортовых систем, предупреждение столкновений. Однако данная система не обеспечивает имитацию высокой плотности воздушного движения и конфликтных ситуаций в воздушном пространстве. Создание средств отработки оборудования единой системы связи, навигации, наблюдения и организации воздушного движения (СНН/ОВД) в перспективной глобальной концепции ИКАО СНН/ОВД является весьма актуальным. Технический результат Технический результат, на достижение которого направлено заявляемое изобретение, состоит в отработке технических и технологических решений элементов и режимов работы единой системы связи, навигации, наблюдения и организации воздушного движения (СНН/ОВД) и должен быть направлен на повышение эффективности и безопасности полетов при внедрении ее на эксплуатируемые самолеты и центры управления воздушным движением. Кроме того, при повышении безопасности отработки элементов системы СНН/ОВД для воздушного пространства ЛМПК обеспечивает возможность высокой интенсивности полетов, получение оценок функционирования бортового и наземного оборудования, дающего возможность определить потенциально конфликтные ситуации в воздушном пространстве. Существенные признаки Для достижения указанного технического результата летно-моделирующий пилотажный комплекс (ЛМПК) включает в наземной части систему управления воздушным движением (УВД) с пультом управления автоматизированного рабочего места диспетчера (АРМД), с приемником спутниковой навигационной системы (СНС), связанным по радиолинии с локальной контрольно-корректирующей станцией (ЛККС) с жидкокристаллическим индикатором (ЖКИ) и радиомодемом линии передачи данных (ЛПД), пилотажно-моделирующим стендом (ПМС) с вычислителем модели виртуального самолета (МВС), вход которого соединен с органами управления на ПМС, первый выход его соединен с входом вычислителя вида приборной доски (ВПД), второй выход связан с вычислителем вида с борта виртуального самолета (ВБВС) с проекцией на экран, а также бортовую часть – самолет-летающую лабораторию (ЛЛ), выполненную со вторым приемником СНС, связанным по радиолинии с ЛККС, с подключенным выходом к входу СНС вторым радиомодемом ЛПД, самолетными датчиками движения ЛЛ, связанными с их выходами штатной индикацией ЛЛ и системой аналого-цифровых преобразователей (АЦП). Согласно техническому решению изобретения, в наземную часть ЛМПК введен вычислитель автоматического зависимого наблюдения (АЗН) для отработки режима автоматического зависимого наблюдения вещательного типа (АЗН-В), в пилотажно-моделирующий стенд для моделирования пространственного движения виртуального самолета введены вычислитель вида с борта ЛЛ (ВБЛЛ), вычислитель вида с двух бортов АРМД (ВДВ), а в бортовую часть ЛЛ – вычислитель формирования сигналов управления (ФСУ) для пилотирования по электронной индикации в зависимости от программного обеспечения и связанный с ним вычислитель сбора и обработки сигналов (СОС). При этом в наземной части пульта управления первый вход вычислителя АЗН связан с радиомодемом ЛПД, второй вход – выход связан с приемником СНС, а выход связан с входом вычислителя АРМД ВДБ и первым входом вычислителя ВБВС, выход вычислителя АРМД ВДБ связан с входом вычислителя ВБЛЛ, размещенных в ПМС, а на борту ЛЛ два входа вычислителя ФСУ подключены, соответственно, к выходам второго приемника СНС, системы АЦП, а выходы вычислителя ФСУ и второго приемника СНС подключены к входам вычислителя СОС, а его выходы соединены с входом жидкокристаллического экрана-индикатора ЖКИ для отображения летчику пилотажно-навигационной информации при пилотировании и контроле параметров полета и второго радиомодема ЛПД УКВ- диапазона для организации цифровой ЛПД по тракту «земля-борт-земля». Такое выполнение ЛМПК повышает эффективность и безопасность полетов и может быть использовано для исследований и испытаний имитации группового-парного полета. Отличительным признаком предлагаемого комплекса от указанного выше известного комплекса является использование летающей лаборатории (ЛЛ), выполняющей реальный полет в зоне аэродрома, и виртуальный самолет пилотажно-моделирующего стенда (ПМС) с визуализацией меток «чужого» на индикаторе, закабинной обстановки самолета на борту и на стенде при пилотировании. В ЛМПК производится отработка режимов и элементов системы СНН/ОВД, включающих линии передачи данных (ЛПД), автоматическое зависимое наблюдение – вещательное (АЗН-В) для зоны аэродрома и захода на посадку, реализуемое с использованием информации спутниковых навигационных систем при дифференциальном режиме работы бортового приемника. Дифференциальный режим обеспечивается локальной контрольно-корректирующей станцией. Непосредственно УВД включает: Контроль за выдерживанием воздушных судов (ВС) заданных маршрутов полета в зоне ответственности. Информирование экипажей воздушных судов о метеоусловиях и воздушной обстановке в районе полета, о состоянии аэродромов, работе средств связи и радиотехническом обеспечении полетов и посадки, передачу других данных, необходимых для безопасного выполнения полетов. Предотвращение опасных ситуаций и столкновений воздушных судов в полете и с препятствиями на аэродроме посредством их эшелонирования в движении на безопасные интервалы, установленные правилами УВД. Принятие своевременных мер по оказанию помощи экипажу воздушного судна, терпящему бедствие или встретившемуся в полете с особыми случаями, угрожающими его безопасности. Извещение органов, осуществляющих поисково-спасательные и аварийно-спасательные работы, о воздушных судах, терпящих или потерпевших бедствие. Перечень фигур на чертежах. Предлагаемый летно-моделирующий пилотажный комплекс представлен на фиг.1-6. На фиг.1 представлена блок-схема структуры и связей ЛМПК для исследования группового полета. Для пояснения сущности изобретения на фиг.1 изображены: 1 – космическая часть спутниковой навигационной системы (СНС); 2 – наземный пункт УВД включающий ЛККС, АЗН-В, АРМД, ЛПД; 3, 4 – линия передачи данных; 5 – борт летающей лаборатории (ЛЛ) с бортовым экспериментальным оборудованием самолетовождения; 6 – наземный пункт – пилотажно-моделирующий стенд (ПМС); 7, 10 – приемник спутниковой навигационной системы (СНС); 8, 9 – радиостанция УКВ (радиомодем); 11, 19 – жидкокристаллический индикатор (ЖКИ); 12 – вычислитель (ЭВМ) автоматического зависимого наблюдения (АЗН); 13 – дисплей автоматизированного рабочего места диспетчера (АРМД); 14 – штатная индикация ЛЛ; 15 – самолетные датчики движения ЛЛ; 16 – система аналого-цифровых преобразователей (АЦП); 17 – вычислитель (ЭВМ) формирования сигналов управления (ФСУ); 18 – вычислитель (ЭВМ) сбора и обработки сигналов ЛЛ (СОС); 19 – жидкокристаллический экран-индикатор (ЖКИ); 20 – вычислитель (ЭВМ) вида с борта ЛЛ (ВБЛЛ); 21 – вычислитель (ЭВМ) вида 2-х бортов АРМД (ВДБ); 22 – дисплей АРМД; 23 – вычислитель (ЭВМ) вида с борта виртуального самолета (ВБВС); 24 – летчик (на ПМС); 25 – органы управления; 26 – вычислитель (ЭВМ) модели виртуального самолета (МВС); 27 – вычислитель (ЭВМ) вида приборной доски (ВПД); 28 – локальная контрольно-корректирующая станция (ЛККС). На фиг.2 – положение реального ЛЛ на посадочной прямой (слева экрана) и соответствующая работа плановой индикации требуемой навигационной характеристики (справа экрана), показывающие его положение на глиссаде и посадочном курсе (планки положения). Самолет находится в пределах заданных границ, на экране слева зеленые метки показывают величины отклонения по боку и курсу от заданной опорной траектории. Виртуальный самолет (красные метки) при этом находится на 4-ом развороте. Опасного сближения нет. На фиг.3 – индикация «Дорога в небе» с показаниями в правом верхнем углу экрана величин дальности Д, перепада высот dH и азимута Fi на виртуальный самолет относительно реального ЛЛ. На фиг.4 – индикация для пилотирования виртуального самолета с отметками виртуального самолета (розовый неподвижный силуэт) и реального самолета (зеленая метка) в центральной части экрана на плановой индикации. В левой части экрана показан авиагоризонт. На фиг.5 – на индикации типа «Дорога в небе» при сближении двух самолетов виртуальный самолет изображен зеленой меткой, а реальный – силуэтом самолета. В правом верхнем углу экрана отображены параметры положения самолетов относительно друг друга: Д, dH, Fi. На фиг.6 – отображение положения самолетов (реального – синий силуэт, виртуального – красный силуэт) относительно их расчетных криволинейных траекторий в районе аэродрома с помощью трехмерной графики. Сведения, подтверждающие возможность осуществления изобретения. Летно-моделирующий пилотажный комплекс (ЛМПК) (см. фиг.1) в наземной части содержит систему управления воздушным движением (УВД) 2 с пунктом управления автоматизированного рабочего места диспетчера (АРМД), вычислитель автоматического зависимого наблюдения (АЗН) 12, приемником спутниковой навигационной системы (СНС) 7, связанным с космической частью спутниковой навигационной системы (СНС) 1 и по радиолинии с локальной контрольно-корректирующей станцией (ЛККС)28 с жидкокристаллическим индикатором (ЖКИ) 11 и радиомодемом 9 цифровой линии передачи данных (ЛПД) 3, 4. Пилотажно-моделирующий стенд 6 (ПМС) выполнен с вычислителем модели виртуального самолета (МВС) 26, вход которого соединен с органами управления на ПМС, первый выход его соединен с входом вычислителя вида приборной доски (ВПД)27, второй выход связан с вычислителем вида с борта виртуального самолета (ВБВС) с проекцией на экран 23, вычислитель вида с борта ЛЛ (ВБЛЛ) 20, вычислитель вида с двух бортов АРМД (ВДБ) 21, с дисплеем АРМД 22. Бортовая часть – самолет -«летающая лаборатория (ЛЛ) выполнена со вторым приемником СНС 10, связанным по радиолинии с ЛККС 28, с подключенным выходом к входу СНС 10 вторым радиомодемом ЛПД 8, самолетными датчиками движения ЛЛ 15, связанными с их выходами штатной индикацией ЛЛ14 и системой аналого-цифровых преобразователей (АЦП) 16, вычислителем формирования сигналов управления (ФСУ)17 и связанным с ним вычислителем сбора и обработки сигналов (СОС) 18. При этом в наземной части пульта управления первый вход вычислителя АЗН 12 связан с радиомодемом ЛПД 9, второй вход – выход связан с приемником СНС 7, а выход связан с входом вычислителя АРМД ВДБ 21 и первым входом вычислителя ВБВС 23, выход вычислителя АРМД ВДБ связан с входом вычислителя ВБЛЛ 20, размещенных в ПМС. На борту ЛЛ 5 два входа вычислителя ФСУ 17 подключены, соответственно, к выходам второго приемника СНС 10, системы АЦП 16, а выходы вычислителя ФСУ и второго приемника СНС подключены к входам вычислителя СОС 18, а его выходы соединены с входом жидкокристаллического экрана-индикатора ЖКИ 19 и второго радиомодема ЛПД 8. Летно-моделирующий пилотажный комплекс (ЛМПК) работает следующим образом. Летно-моделирующий пилотажный комплекс (ЛМПК) обеспечивает самолетовождение в штурвальном и директорном режимах по пространственным криволинейным траекториям на предпосадочном маневре и при заходе на посадку, исследования и имитацию группового – парного полета. ЛЛ оборудована комплексом автоматизированного самолетовождения на основе спутниковой информации. Для отработки режима автоматического зависимого наблюдения вещательного типа (АЗН-В) организовано автоматизированное рабочее место диспетчера (АРМД) на базе вычислителя (12) с дисплеем (13). Координаты самолета по ЛПД (8, 9) передаются на АРМД (12), на дисплее (13) которого отображаются экспериментальные виды индикации. Пилотажно-моделирующий стенд (6) моделирует пространственное движение виртуального самолета и в графическом виде на дисплее позволяет имитировать полет в паре с реальным самолетом. В состав ЛМС входят несколько ЭВМ-компьютеров с дисплеями. Стенд и пункт с АРМД (12, 13) объединены локальной вычислительной сетью (ЛВС) с использованием объединительных коммутационных устройств (ОКУ). При этом на ЭВМ (26) устанавливается математическая модель виртуального маневренного самолета (например, Су-27), управление которым осуществляется летчиком с помощью органов управления: штурвала, педалей, рукоятки управления движением (РУД) и механизации крыла. Органы управления подсоединены к компьютеру через плату аналого-цифрового преобразователя (АЦП). На ЭВМ (21) вида двух бортов АРМД принимаются по ЛВС кадры борта ЛЛ и виртуального самолета и их метки на фоне карты отображаются на дисплее (22) (см. фиг.2). На дисплее также отображаются траектории захода на посадку по курсу, глиссаде и их отклонения в границах требуемых навигационных отклонений для двух самолетов (реального и виртуального) или авиагоризонта этих самолетов. ЭВМ (20) принимает по ЛВС кадр с борта ЛЛ и на дисплее отображается индикация, которая в данный момент есть на борту ЛЛ на ЖКИ (19), т.е. на ПМС осуществляется дублирование пилотажной индикации с ЖКИ ЛЛ, например «Дорога в небе». ЭВМ принимает через порты кадры с борта и пилотажного стенда (ЭВМ (26) и ЭВМ (12) АРМД). Этим самым достигается отображение на дисплее ЭВМ (23) отметок двух самолетов на фоне индикации ЖКИ (19) борта (см. фиг.3). ЭВМ (23) принимает по ЛВС кадры (информационные пакеты) борта ЛЛ (4) и виртуального самолета. Так осуществляется на дисплее отображение «Вид закабинного пространства с борта виртуального самолета» с индикацией отметки (силуэта) реального ЛЛ при имитации сближения двух самолетов в едином виртуальном пространстве (см. фиг.5). ЭВМ (27) принимает по ЛВС информационный пакет виртуального самолета и отображает на его дисплее индикацию «Приборная панель виртуального самолета». На жестких дисках вычислителя ЛЛ (18) регистрируются информационные пакеты от бортового приемника СНС (всемирное время, текущие координаты, составляющие скорости и др.). Информация от самолетных датчиков (15): дистанционного авиагоризонта (крен, тангаж) и курсовой гиромагнитной системы (курс), от датчиков баровысоты, скорости, от автономных датчиков угловых скоростей и линейных ускорений преобразуется в параллельный код и далее поступает в вычислитель (17). Вычислитель (17) преобразует поступающую информацию от системы (16) АЦП и СНС в единый информационный пакет и отправляет его в вычислитель (18), который формирует индикацию для отображения на ЖКИ и формирует пакет данных для отправки в линию передачи данных (ЛПД) (9, 8). На наземном пункте (3) ЛПД в формате единого времени производится регистрация информации, поступающей от локальной вычислительной сети с пилотажно-моделирующего стенда, от ЛККС 28 и по линии передачи данных с борта ЛЛ (4). В ЛМПК производится отработка режимов и элементов системы СНН/ОВД, включающих линии передачи данных (ЛПД), автоматическое зависимое наблюдение – вещательное (АЗН-В) для зоны аэродрома и захода на посадку, реализуемое с использованием информации спутниковых навигационных систем при дифференциальном режиме работы бортового приемника. Дифференциальный режим обеспечивается локальной контрольно-корректирующей станцией. В соответствии с составом и структурой ПМС 6 предназначен для обеспечения имитации парного полета самолета-летающей лаборатории с математической моделью виртуального самолета в едином виртуальном пространстве. Бортовой информационный комплекс самолетовождения состоит их двух вычислителей (17, 18), блока ввода (система АЦП (16)) информации со штатных самолетных систем (15), приемника СНС (10) объединяя в единый (обобщенный) информационный кадр для передачи другому вычислителю (17). Вычислитель (18) использует поступающую информацию от первого для формирования индикации летчику на ЖКИ (19) и передачи через радиомодем (9) на землю обобщенного кадра, в том числе координат ЛЛ для организации режима автоматического зависимого наблюдения (АЗН-В). Двунаправленный модем (9) предназначен для передачи с борта на землю полного (обобщенного) информационного кадра с вычислителя (17) и приемника СНС (10), приема с земли на борт дифференциальных поправок (ЛККС) (28) для обеспечения дифференциального режима бортового приемника СНС (10), а также информационного кадра математической модели виртуального самолета для визуализации его положения (отметки) на ЖКИ (19). ПМС представляет собой одноранговую локальную вычислительную сеть, работающую под управлением операционной системы OS Windows 98SE. Один из ее вычислителей (26) оснащен платой АЦП и реализует математическую модель динамики виртуального самолета. Органы управления (25) виртуальным самолетом: штурвал, педали, РУД соединены с этим вычислителем. Из этого вычислителя (26) в ЛВС поступает информационный кадр с параметрами движения виртуального самолета. К этой же сети подключен вычислитель пункта АРМД (21), который выполняет функцию управления ЛККС (28) и ЛПД (8, 9). С вычислителя АРМД (12) поступает в сеть кадр с параметрами движения реального самолета (ЛЛ), принятыми по ЛПД, и с него передается на борт кадр виртуального самолета. Входящие в локальную сеть другие вычислители наземных пунктов выбирают из локальной сети кадры реального и/или виртуального самолетов для обеспечения различных видов индикации при отработке имитации группового (парного) полета самолетов. Объединение всех вычислителей в общую локальную вычислительную сеть обеспечивается коммутирующими устройствами в ЭВМ. Другие вычислители стенда подключены через коммутирующие устройства (20, 21, 23, 26, 27) к ЛВС и выбирают из нее кадры реального самолета (ЛЛ) и/или виртуального самолета (стенда) для демонстрации на наземном пункте различных видов индикации: вид двух бортов на фоне географической карты (дисплей (22)), дублирование индикации ЖКИ (11), вид закабинного пространства с борта виртуального самолета (дисплей вычислителя (23)). Логика работы программного обеспечения бортовых и наземных вычислителей организована следующим образом. Все программы, включенные в летно-пилотажный моделирующий комплекс, принимают адресованные «себе» по разным каналам информационные пакеты по принципу «синхронного ввода», т.е. каждая программа непрерывно контролирует свою среду передачи. В момент обнаружения адресованного «себе» информационного пакета принимает его и производит различные действия по его обработке, в зависимости от содержащейся в пакете информации и конкретного состояния каждой конкретной программы. Полет реального самолета ЛЛ (4) проходит по пространственной криволинейной траектории. Алгоритмы формирования криволинейной траектории позволяют самолету выходить на посадочную прямую (фиг.2) с одновременным выполнением снижения и разворотов, а криволинейный участок заканчивается на высоте 150÷200 м. Заход на посадку выполняется с высоты 400÷500 м и до высоты 30÷20 м с последующим уходом на второй круг или посадкой в штурвальном режиме и визуальном пилотировании. На борту ЛЛ с помощью спутникового приемника СНС и вычислителей (17, 18) определяются координаты самолета, которые по ЛПД (8, 9) передаются на наземный пункт диспетчеру на дисплей АРМД. Так реализуется функция наблюдения и контроля за воздушной обстановкой в зоне аэродрома и организации воздушного движения. Из перечня информации, передаваемой ЛЛ АЗН-В, в задачах контроля и оценки положения самолета на траектории с борта на АРМД передается бортовой обобщенный информационный кадр, содержащий время СНС, широту В программном обеспечении режима АЗН-В на АРМД формируются следующие виды индикации: – траектория полета ЛЛ на фоне карты местности, цвет траектории зависит от режима работы бортового приемника СНС (наличие дифференциального режима – зеленый, отсутствие – красный) (см. фиг.6); – отметка местоположения ЛЛ на фоне карты местности с вектором скорости, цвет отметки зависит от режима работы бортового приемника СНС (зеленый -красный); – повторение электронной индикации, формируемой на борту ЛЛ для самолетовождения (см. фиг.4); – траектории ЛЛ на заключительном участке захода на посадку в проекциях на горизонтальную и вертикальную плоскости в границах ограничений (см. фигуру 6); Выбор вида индикации на АРМД осуществляется с помощью нажатия соответствующей кнопки на панели управления. Пилотирование ЛЛ (4) осуществляется по информации электронной индикации, отображаемой на экране ЖКИ (19) по стандартной или криволинейной траекториям. Заходы по нестандартным криволинейным траекториям выполняются по согласованию со службами УВД аэродрома. Заданная траектория выдерживается в узком диапазоне с точностью ±5 м на посадочной прямой при посадочной конфигурации самолета. В процессе полетов реального самолета ЛЛ по кругу и заходе на посадку в кабине на экране ЖКИ (19) отображается метка виртуального самолета стенда («чужого»). В части полетов летчик ЛЛ (4), выполняя пилотирование с использованием индикации ЖКИ (19), осуществляет различные маневры относительно виртуального самолета (метки): приближения, удаления, облеты справа, слева, снизу, сверху (фигуры 4, 5). При этом летчик виртуального самолета выполняет полет по той же траектории с установившимися параметрами полета в начале режима без маневрирования. Во время маневрирования по индикации на ЖКИ (19) летчик ЛЛ оценивает наглядность пилотирования при имитации парного полета, определяет параметры (дистанцию) сближения, момент возникновения потенциально конфликтной ситуации и возможность ее исключения (см. фигуры 5, 6). В другой части полетов летчик ЛЛ выполняет пилотирование по заданной запрограммированной траектории и используя различные виды электронной индикации на ЖКИ (19) без маневрирования. При этом летчик виртуального самолета на стенде, при использовании дисплеев визуализации закабинного пространства и приборной доски, осуществляет маневрирование относительно метки реального самолета («чужого»): сближения и удаления, облеты справа, слева, сверху и снизу, перестроения. Летчик стенда оценивает возможность выполнения имитации парного полета, параметры сближения, момент возникновения потенциально опасной ситуации и ее предупреждение (см. фигуры 5, 6). В виду реального отсутствия влияния на безопасность полета летчики реального и виртуального самолетов выполняют маневры относительно друг друга на протяжении всего режима.
Формула изобретения
Летно-моделирующий пилотажный комплекс (ЛМПК), включающий в наземной части систему управления воздушным движением (УВД) с пунктом управления автоматизированного рабочего места диспетчера (АРМД), приемником спутниковой навигационной системы (СНС), связанным по радиолинии с локальной контрольно-корректирующей станцией (ЛККС) с жидкокристаллическим индикатором (ЖКИ) и радиомодемом линии передачи данных (ЛПД), пилотажно-моделирующим стендом (ПМС) с вычислителем модели виртуального самолета (МВС), вход которого соединен с органами управления на ПМС, первый выход его соединен с входом вычислителя вида приборной доски (ВПД), второй выход связан с вычислителем вида с борта виртуального самолета (ВБВС) с проекцией на экран, а также бортовую часть – самолет-летающая лаборатория (ЛЛ), выполненную со вторым приемником СНС, связанным по радиолинии с ЛККС, с подключенным выходом к входу СНС вторым радиомодемом ЛПД, самолетными датчиками движения ЛЛ, связанными с их выходами штатной индикацией ЛЛ и системой аналого-цифровых преобразователей (АЦП), отличающийся тем, что в наземную часть введен вычислитель автоматического зависимого наблюдения (АЗН) для отработки режима автоматического зависимого наблюдения вещательного типа (АЗН-В), в пилотажно-моделирующий стенд для моделирования пространственного движения виртуального самолета введены вычислитель вида с борта ЛЛ (ВБЛЛ), вычислитель вида с двух бортов АРМД (ВДБ), а в бортовую часть ЛЛ – вычислитель формирования сигналов управления (ФСУ) для пилотирования по электронной индикации в зависимости от программного обеспечения и связанный с ним вычислитель сбора и обработки сигналов (СОС), при этом в наземной части пульта управления первый вход вычислителя АЗН связан с радиомодемом ЛПД, второй вход-выход связан с приемником СНС, а выход связан с входом вычислителя АРМД ВДБ и первым входом вычислителя ВБВС, выход вычислителя АРМД ВДБ связан с входом вычислителя ВБЛЛ, размещенных в ПМС, а на борту ЛЛ два входа вычислителя ФСУ подключены соответственно к выходам второго приемника СНС, системы АЦП, а выходы вычислителя ФСУ и второго приемника СНС подключены ко входам вычислителя СОС, а его выходы соединены с входом жидко-кристаллического экрана-индикатора ЖКИ для отображения летчику пилотажно-навигационной информации при пилотировании и контроле параметров полета и второго радиомодема ЛПД УКВ-диапазона для организации цифровой ЛПД по тракту «земля-борт-земля».
РИСУНКИ
|
||||||||||||||||||||||||||
 , долготу А, высоту Н по СНС, составляющие скорости «север – юг», «запад – восток», «верх – низ», число спутников, признак наличия дифференциального режима СНС, тангаж
, долготу А, высоту Н по СНС, составляющие скорости «север – юг», «запад – восток», «верх – низ», число спутников, признак наличия дифференциального режима СНС, тангаж  , крен
, крен  , курс
, курс  , приборная скорость Vпр, барометрическая высота Нбар; параметры опорной траектории захода на посадку: координаты входного порога ВПП (
, приборная скорость Vпр, барометрическая высота Нбар; параметры опорной траектории захода на посадку: координаты входного порога ВПП ( , H), координаты противоположного торца ВПП в приращениях относительно входного порога (
, H), координаты противоположного торца ВПП в приращениях относительно входного порога ( В,
В,  гл, слова служебной информации, разовые команды с земли на борт, код запущенной на борту программы индикации.
гл, слова служебной информации, разовые команды с земли на борт, код запущенной на борту программы индикации.