Патент на изобретение №2308078
|
||||||||||||||||||||||||||
(54) СПОСОБ РАСЧЕТА СТОЛКНОВЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ
(57) Реферат:
Изобретение относится к способам расчета обстоятельств дорожно-транспортного происшествия путем расчета столкновения транспортных средств. Техническим результатом является определение изменения скоростей объектов исходя из затрат их кинетической энергии на деформацию при столкновении. Технический результат достигается тем, что определяют фактические размеры и формы деформированных элементов конструкции, представляют в виде сеточных моделей наружные поверхности столкнувшихся объектов, или внутренние элементы конструкций объектов, или их сочетание, решают физически нелинейную задачу путем многократного решения системы уравнений, вычисляют изменение скоростей объектов исходя из затрат их кинетической энергии на деформацию при столкновении. 6 ил.
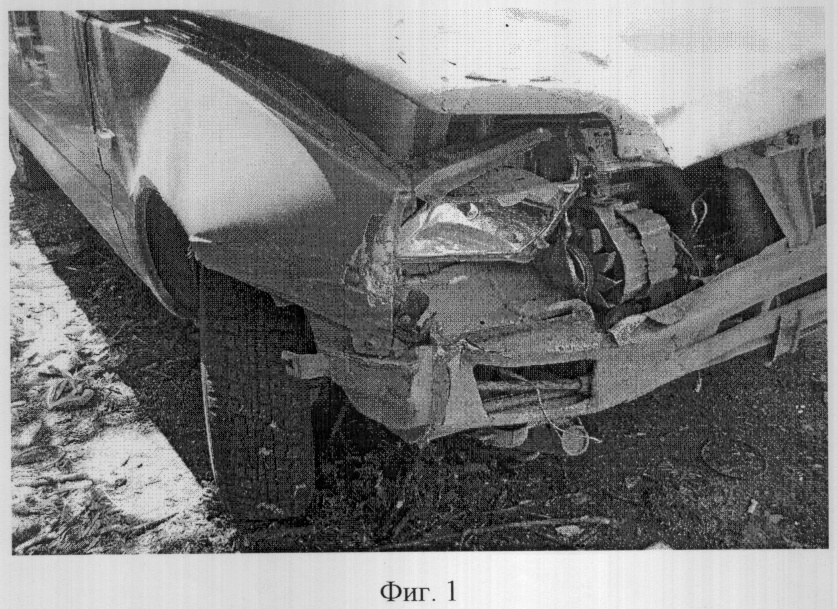
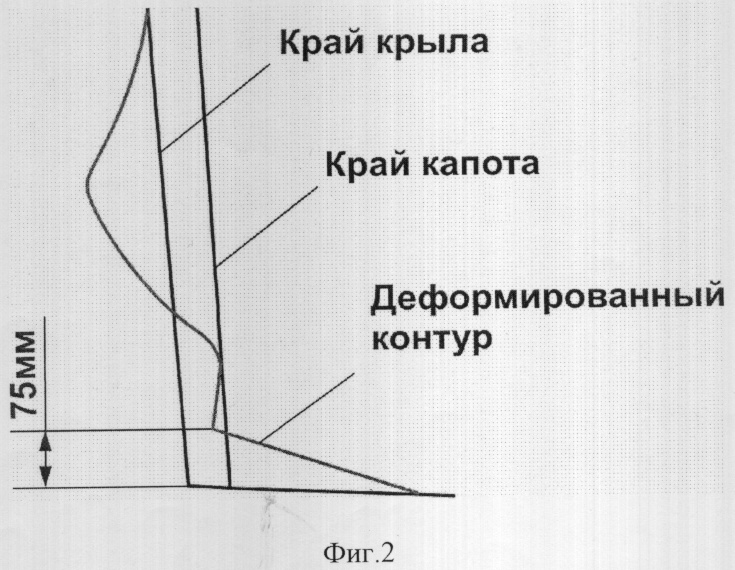
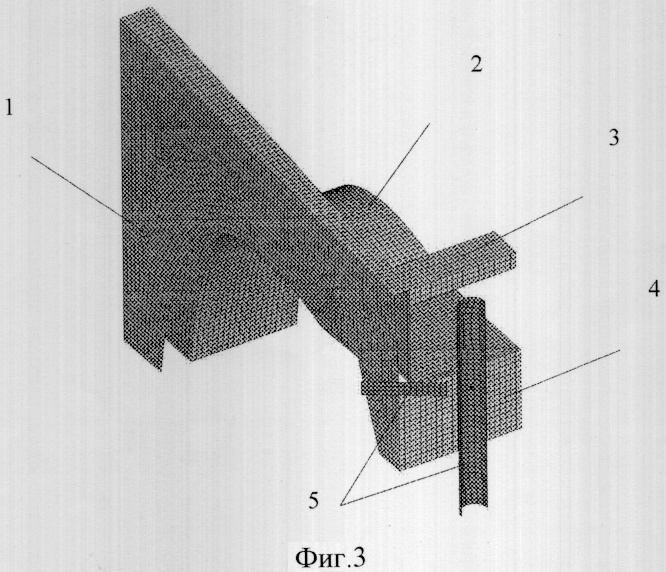
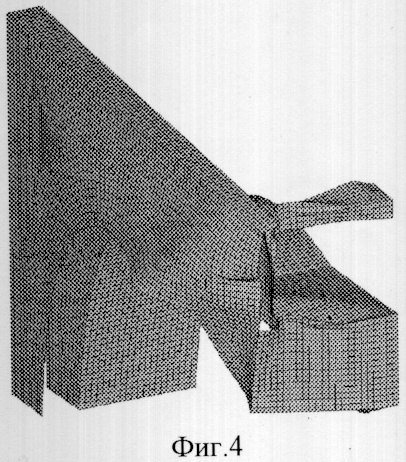
Изобретение относится к области моделирования обстоятельств дорожно-транспортного происшествия путем расчета столкновения транспортных средств и может быть использовано для судебной экспертизы механизма дорожно-транспортного происшествия, а также технической экспертизы транспортного средства с целью выяснения наличия страхового случая и обстоятельств причинения вреда. Известен способ компьютерной симуляции столкновений (Патент US №6195625, МПК G06F 17/50, опубл. 27.02.2001 г.), в котором наружные поверхности транспортного средства и препятствия представляются в виде сеточных аналогов, состоящих из узлов и оболочечных элементов. Сопротивление деформированию каждой области сетки определяется экспериментально, и для каждой области сетки вводится соотношение между действующими силами и перемещениями узлов сетки от начальной наружной поверхности, а также аналогичные соотношения при разгрузке. При этом деформация каждого узла сетки может не влиять на деформацию соседних с ним узлов. Расчетом определяются суммарные силы в узлах сетки, контактирующих с другим объектом, и изменение координат контактирующей поверхности во времени. Однако известный способ разработан для анализа процесса, происходящего в узком интервале времени – только собственно столкновения транспортных средств между собой или с препятствиями, не учитывает внутренние элементы конструкций транспортных средств и препятствий и их фактические повреждения, использует экспериментально полученные зависимости сил сопротивления от деформации наружной поверхности транспортного средства или препятствия без учета механизма и истории получения таких деформаций, использует экспериментальные зависимости, полученные испытанием другого экземпляра транспортного средства или препятствия, хотя и той же модели. Поэтому он позволяет получать вероятностный, а не фактический механизм дорожно-транспортного происшествия, требуемый законодательством (Россинская Е.Р. Судебная экспертиза в гражданском, арбитражном, административном и уголовном процессе. – М.: Норма, 2005, стр.24, стр.232-234). Известна методика экспертизы дорожно-транспортных происшествий (Иларионов В.А. Экспертиза дорожно-транспортных происшествий. М.: Транспорт, 1989), которая позволяет произвести расчет скоростей транспортных средств перед столкновением только по длине их видимых следов торможения. Известная методика позволяет использовать закон сохранения энергии в части учета затрат кинетической энергии тормозящего транспортного средства на работу сил трения при торможении или поперечном скольжении. Данная методика не позволяет учитывать затраты кинетической энергии движущегося транспортного средства на деформацию как своей конструкции, так и конструкции другого транспортного средства или препятствия, с которым произошло столкновение. Вследствие этого невелика достоверность расчета столкновения транспортных средств. Технический результат предложенного изобретения – увеличение достоверности расчета обстоятельств дорожно-транспортного происшествия за счет учета деформаций внутренних элементов конструкций транспортных средств и препятствий и установление фактических, а не вероятностных обстоятельств дорожно-транспортного происшествия за счет учета фактических механических свойств элементов конструкций транспортных средств и препятствий, участвовавших в дорожно-транспортном происшествии. Технический результат достигается способом расчета столкновения транспортных средств, включающим представление столкнувшихся объектов – транспортных средств и препятствий – в виде сеточных моделей, имеющих деформационные соотношения между перемещениями узлов сетки и величинами локальных сил, действующих в этих узлах, вычисление координат сетки в течение столкновения, где каждая позиция базируется на предыдущей вычисленной позиции, в котором в отличие от прототипа определяют деформации конструкции, по меньшей мере, одного объекта, полученные в результате столкновения, определяют механические свойства элементов конструкции, по меньшей мере, одного объекта, полагая остальные объекты абсолютно жесткими, представляют в виде сеточных моделей наружные поверхности столкнувшихся объектов, или внутренние элементы конструкций объектов, или их сочетание, причем полностью или их частей, между которыми был контакт, затем для сеточных моделей, по меньшей мере одна из которых не является абсолютно жесткой, методом конечных элементов на основе определенных механических свойств элементов конструкций решают физически нелинейную задачу, в результате получают деформации, совпадающие с некоторой точностью с ранее определенными, по меньшей мере у одного из объектов. Кроме того, рекомендуется для определения ориентации объектов в момент столкновения, когда два или более их них не являются абсолютно жесткими, вычислять силы сопротивления деформации, действующие на сеточные модели, исходя из деформационных соотношений для сеточных моделей. Также рекомендуется для определения изменения скорости одного или более объектов в результате столкновения, вычислять величину энергии, затраченной на деформацию сеточных моделей, исходя из деформационных соотношений для сеточных моделей. Предложенный способ позволяет благодаря определению деформации поврежденных частей транспортных средств и препятствий установить фактические размеры и формы этих частей, приобретенные в результате столкновения, относительно неповрежденных частей или размеров и формы поврежденных частей до столкновения. Целью определения деформаций также является установление фактических размеров элементов конструкций (толщина, диаметр, и т.д.), так как у транспортных средств одной и той же модели фактически могут быть как конструктивные отличия некоторых элементов, так и изменения, произошедшие при предшествующей эксплуатации и ремонте транспортных средств. Кроме того, определение фактических механических свойств элементов конструкций транспортных средств и препятствий, таких как модуль упругости (модуль Юнга), предел текучести, коэффициент поперечной деформации (коэффициент Пуассона), позволяет далее рассматривать материалы элементов конструкций, по меньшей мере, как идеально упругопластические. Объекты, для которых определить механические свойства не представляется возможным, полагаются абсолютно жесткими. Так как транспортные средства имеют внутренние силовые элементы, которые сопротивляются деформации или деформируются при столкновении объектов, кроме того, их механические свойства изменяются во время эксплуатации, учет этих факторов при построении сеточных моделей позволяет повысить достоверность расчета и обеспечивает получение не вероятностной, а достоверной картины. Способ осуществляют следующим образом. У столкнувшихся объектов измеряют, например, с помощью линейки или специальных средств величину деформации наружной поверхности, или внутренних силовых элементов, или то и другое. Затем определяют механические свойства деформируемых элементов конструкций. Затем конструкции транспортных средств и препятствий, содержащие как наружные, так и внутренние элементы, с той или иной степенью детализации (полностью, если в результате столкновения повреждена большая часть или вся конструкция, или части конструкций, получившие повреждения в результате столкновения) представляют в виде сеточных моделей, состоящих из узлов и пространственных точечных, одномерных, оболочечных или трехмерных элементов с определенными механическими свойствами. При представлении в виде сеточного аналога части конструкции транспортного средства или препятствия, отделенной от остальной части конструкции некоторой поверхностью, вместо отделенной части конструкции узлам сеточного аналога, находящимся на этой поверхности, устанавливаются такие граничные условия, которые полностью обеспечивают условия закрепления оставшейся части конструкции к отделенной части. Неполная детализация конструкции транспортного средства, или препятствия, или ее части, представленной в виде сеточного аналога, обеспечивает вычисление возможных наименьших сил сопротивления деформированию за счет неучета сопротивления неучтенных элементов конструкции. Рассмотрение материалов элементов конструкции как идеально упругопластических также обеспечивает вычисление возможных наименьших сил сопротивления деформированию. Решение физически нелинейной задачи упругопластического деформирования конструкции транспортного средства или препятствия производится методом конечных элементов и состоит в сведении краевой задачи к системе разрешающих нелинейных уравнений, связывающих перемещения или скорости соседних узлов сеточного аналога (ГОСТ Р 50-54-42-88 “Расчеты и испытания на прочность. Метод конечных элементов и программы расчета на ЭВМ пространственных элементов конструкций в упругопластической области деформирования”, стр.3). Процесс решения разбивается на некоторое число шагов, каждый из которых состоит в введении интерполяционных функций, аппроксимирующих поля перемещений внутри элементов через перемещения в узлах элементов, выводе уравнений для каждого элемента, объединении уравнений элементов в единую систему для всего рассматриваемого сеточного аналога, приложении внешних сил или геометрических граничных условий к узлам сеточного аналога (Никонов В.Н. Некоторые особенности алгоритмов расчетов больших пластических деформаций. Механика и прочность авиационных конструкций. Сборник докладов Российской научно-технической конференции. Уфа, 2001, стр.184-189). Далее решается общая система уравнений, и вычисляются искомые перемещения узлов сеточной модели. На каждом шаге решения координаты узлов сеточного аналога определяются суммированием начальных координат узлов с перемещениями узлов, вычисленными на предыдущем шаге решения. Решение задачи упругопластического деформирования может проводиться совместно для двух и более сеточных моделей, обеспечивая условия непроникновения узлов сетки одной сеточной модели сквозь поверхность другой сеточной модели, или раздельно для каждой сеточной модели, когда действие на сеточную модель другого объекта заменяется внешними силами или контактом с абсолютно жестким телом. Решение задачи упругопластического деформирования совместно для двух и более сеточных моделей проводится до тех пор, пока деформация, по меньшей мере, хотя бы одной сеточной модели не совпадет с некоторой точностью с определенной деформацией конструкции объекта, который эта модель представляет. Раздельное решение задач упругопластического деформирования каждой сеточной модели проводится до тех пор, пока деформация сеточной модели не совпадет с некоторой точностью с определенной деформацией конструкции объекта, который эта модель представляет. Для способа совместного решения задачи упругопластического деформирования двух и более сеточных моделей, по меньшей мере, для одной из которых деформация совпала с некоторой точностью с определенной деформацией конструкции того объекта, который эта модель представляет, расчетные деформации остальных сеточных моделей сравниваются с определенными деформациями конструкций соответствующих этим моделям объектов. Тогда возможность получения объектами определенных для них деформаций устанавливается как непревышение разности расчетных деформаций сеточных моделей и определенных деформаций объектов некоторой величины. Если разность расчетных деформаций сеточных моделей и определенных деформаций соответствующих объектов велика, т.е. превышает некоторую величину, имеет место имитация дорожно-транспортного происшествия. Для способа раздельного решения задач упругопластического деформирования каждой сеточной модели до тех пор, пока деформация сеточной модели не совпадет с некоторой точностью с определенной деформацией конструкции соответствующего объекта, исходя из деформационных соотношений для сеточной модели на каждом шаге решения задачи упругопластического деформирования вычисляют силы сопротивления деформации. Далее величины и направления расчетных сил сопротивления деформации сравниваются, по меньшей мере, для двух контактировавших при столкновении объектов. Результатом сравнения является соответствие деформаций объектов при одинаковой величине и противоположности по направлению силы их взаимодействия. Из равенства по величине и противоположности по направлению силы взаимодействия определяется взаимная ориентация транспортных средств и препятствий в момент столкновения и в процессе их взаимной деформации. Если разность расчетных величин сил сопротивления деформации сеточных моделей, по меньшей мере, двух столкнувшихся объектов велика, т.е. превышает некоторую величину, имеет место имитация дорожно-транспортного происшествия. Если разность расчетного и указанного участниками угла взаимной ориентации транспортных средств и препятствий велика, т.е. превышает некоторую величину, имеет место несоответствие обстоятельств дорожно-транспортного происшествия обстоятельствам, указанным его участниками. Из решения задач упругопластического деформирования сеточных моделей на каждом шаге расчета вычисляют энергию, затраченную на деформацию конструкций транспортных средств и препятствий. Из закона сохранения энергии следует, что часть кинетической энергии двигавшихся объектов затрачена на деформацию конструкций двигавшихся объектов и препятствий. В частности, если препятствие остается неподвижным, а двигавшийся объект не отброшен от препятствия после столкновения, то его скорость в момент столкновения вычисляют из равенства его кинетической энергии в момент столкновения энергии, затраченной на деформацию конструкций объекта и препятствия. В общем случае столкновения объектов выражение для изменения их скоростей в результате столкновения может быть получено из совместного решения уравнений, вытекающих из закона сохранения энергии и закона сохранения количества движения. Пример осуществления способа. На фиг.1 показано деформированное транспортное средство – автомобиль ВАЗ-11113 “Ока”. Необходимо рассчитать скорость его столкновения. Осмотром установлено, что данный автомобиль деформирован в передней правой части контактом усилителя бампера с жестким объектом, имеющим узкую вертикальную форму, и контактом передней части переднего правого крыла с жестким объектом, имеющим узкую горизонтальную форму. В результате передняя правая часть автомобиля деформирована изгибом назад с одновременным выгибом передней части колесной арки переднего правого крыла вправо. Жесткая рама крепления двигателя не деформирована, поэтому в расчете не учитывается. Схема деформации передней правой части автомобиля показана на фиг.2. Деформацию передней правой части автомобиля можно охарактеризовать единственным размером – изгибом переднего правого угла автомобиля назад на 75 мм. Определяют механические свойства материалов. Вся деформированная часть автомобиля изготавливается из листовой конструкционной стали марки сталь 08 – сталь 10 с модулем упругости 20000 кг/мм2, коэффициентом поперечной деформации 0.33, пределом текучести не менее 30 км/мм2. Строят сеточную модель передней правой части автомобиля и другого объекта, контактом с которым получены деформации, включая внутренние конструкционные элементы, обеспечивающие жесткость передней правой части. На фиг.3 показана сеточная модель передней правой части конструкции автомобиля, включающей крыло 1, брызговик 2, верхнюю поперечину 3 и усилитель бампера 4, и абсолютно жесткого объекта 5, модель состоит из 8153 оболочечных элементов. Решают физически нелинейную задачу деформирования сеточной модели передней правой части автомобиля об абсолютно жесткий объект до получения деформации переднего правого угла конструкции не более 75 мм. Результат решения показан на фиг.4. Вычисляют силы, действовавшие на сеточную модель со стороны абсолютно жесткого объекта. График изменения и продольной силы от деформации переднего правого угла крыла показан на фиг.5, а) продольной силы, б) поперечной силы. Вычисляют затраты энергии на деформацию конструкции. На фиг.6 показан график роста энергии, затраченной на деформацию конструкции. Видно, что затрата энергии составляет 64000 кг·мм = 627.84 Н·м. Определяют скорости столкновения объектов. Например, скорость данного автомобиля при столкновении с неподвижным жестким объектом может быть определена из равенства кинетической энергии автомобиля энергии, затраченной на его деформацию
где m – масса снаряженного автомобиля ВА3-11113 с водителем 700 кг, А – энергия деформации 627.84 Н·м, Тогда получают, что скорость автомобиля в момент столкновения была не менее
Полученное значение скорости является более достоверным, нежели по прототипу, где она будет завышена, поскольку там жесткость рамы крепления двигателя переносится на оболочку. Вследствие этого при одинаковых деформациях расчетом по известному способу (прототипу) будет получено более высокое значение энергии, затраченной на деформацию. Таким образом, учет расположения силовых элементов конструкции, их деформации и механических свойств позволяет увеличить достоверность расчета столкновения транспортных средств и установить обстоятельства дорожно-транспортного происшествия и его виновников.
Формула изобретения
Способ расчета скорости транспортных средств при столкновении, отличающийся тем, что определяют фактические размеры и формы деформированных элементов конструкции, по меньшей мере, одного объекта, определяют механические свойства деформированных элементов конструкции, по меньшей мере, одного объекта, полагая остальные объекты абсолютно жесткими, представляют в виде сеточных моделей наружные поверхности столкнувшихся объектов или внутренние элементы конструкций объектов, или их сочетание, причем полностью или их частей, между которыми был контакт, затем для сеточных моделей, по меньшей мере одна из которых не является абсолютно жесткой, методом конечных элементов на основе определенных механических свойств элементов конструкций решают физически нелинейную задачу путем многократного решения системы уравнений, в ходе которого вычисляют перемещения узлов сетки во времени и пространстве и действующие на узлы деформирующие силы, в результате чего получают деформации, совпадающие с некоторой точностью с ранее определенными, по меньшей мере у одного из объектов, после чего вычисляют относительные деформации в узлах сетки, после чего вычисляют изменение скоростей объектов исходя из затрат их кинетической энергии на деформацию при столкновении.
РИСУНКИ
|
||||||||||||||||||||||||||

 – скорость автомобиля в момент столкновения.
– скорость автомобиля в момент столкновения.