Патент на изобретение №2308055
|
||||||||||||||||||||||||||
(54) СПОСОБ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ КОНТУРА МОРСКОГО СУДНА ПО РАДИОЛОКАЦИОННЫМ НАБЛЮДЕНИЯМ
(57) Реферат:
Изобретение относится к области управления движением морских судов для обеспечения безопасности морского движения. Достигаемым техническим результатом является формирование изображения контура морского судна по двумерным (угол-расстояние) радиолокационным наблюдениям при полном подавлении помеховой компоненты от взволнованной поверхности моря. Указанный результат достигается за счет того, что формируют матрицу, содержащую эхо-сигналы от цели и от поверхностного волнения моря, столбцы которой являются радиолокационными линейками наблюдения, соответствующими угловым положениям радиолокационной антенны, получают биполярную матрицу вейвлет-спектров, из матрицы вейвлет-спектров исключают элементы одноименной полярности, не содержащие вейвлет-спектров эхо-сигналов от корпуса морского судна, устанавливают значение порога биномизации, выполняют биномизацию матрицы вейвлет-спектров, выделяют изображение судна путем обработки биномизированной матрицы вейвлет-спектров морфологическим фильтром. 3 ил.
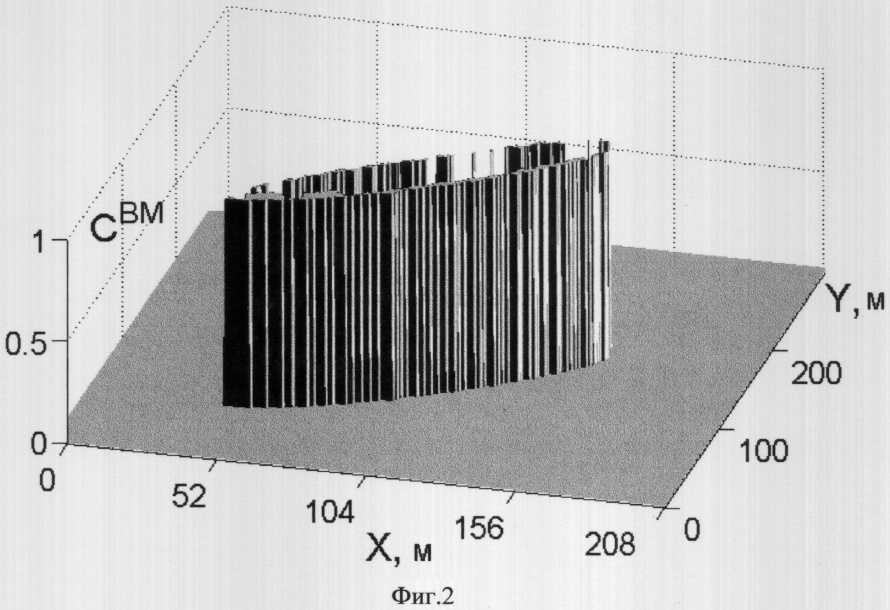
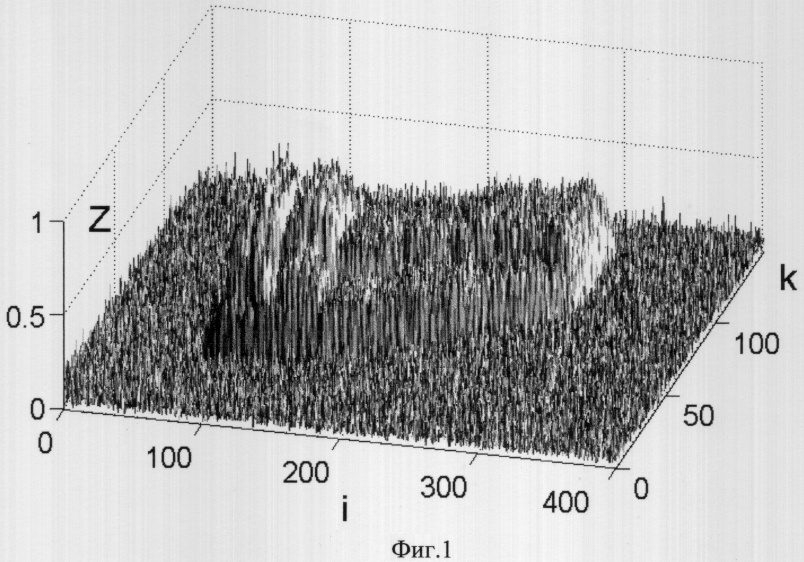
Изобретение относится к области управления движением морских судов (далее – судов) и предназначено для формирования изображения контура морского судна по радиолокационным наблюдениям с целью расширения информационной базы систем управления движением судов (СУДС) в интересах обеспечения безопасности морского движения. Одной из задач, стоящих перед СУДС, в условиях высокой интенсивности транспортных потоков является обеспечение безопасности движения в местах скопления судов: в проливах, на фарватерах и путях подхода судов к акваториям портов. Основными условиями безопасного движения являются: недопущение чрезмерного сближения судов до некоторой критической величины, определяющей зону безопасности вокруг судна и именуемой «корабельный домен», а также обладание текущей информацией о намерениях каждого судна. Традиционно корабельным доменом считается зона вокруг судна заданного радиуса, форма и размеры которой не учитывают геометрии, фактических размеров и текущего курса судна. При этом курс судна определяется путем оценки вектора скорости по радиолокационным наблюдениям в течение нескольких оборотов антенны, что свидетельствует о запаздывании информации о направлении и характере движения судна. В условиях высокой интенсивности движения в местах скопления судов существенную роль для контроля фактического сближения судов (наикратчайшее расстояние между ближайшими точками корпусов судов) играет информация о геометрических характеристиках (длина и ширина судна) и ориентации корпусов судов в текущий момент времени. В СУДС подобные сведения могут быть получены в процессе управления судами путем формирования изображения профиля корпуса каждого судна в горизонтальной плоскости (далее – контур судна) по двумерным (угол-расстояние) радиолокационным наблюдениям, получаемым за счет радиолокационного наблюдения в течение одного оборота антенны, что обеспечивает СУДС информацией о длине, ширине и курсе (угловом положении продольной оси контура) каждого судна, соответственно о фактическом сближении судов в реальном масштабе времени. В целом радиолокационные наблюдения, формируемые в течение одного оборота антенны на выходе системы селекции движущихся целей (СДЦ) радиолокационной станции (включающей амплитудно-цифровой преобразователь – АЦП), представляют собой матрицу эхо-сигналов, столбцы которой формируются из радиолокационных линеек наблюдений. Радиолокационная линейка наблюдений для каждого углового положения антенны представляет собой последовательность дискретных отсчетов эхо-сигнала на выходе АЦП. Матрица эхо-сигналов формируется для каждого морского судна (далее – судно), которое попадает в зону локации СУДС. Матрица эхо-сигналов содержит две главные компоненты: эхо-сигналы от корпуса судна и от поверхностного волнения моря, которые определяют информационную базу для формирования изображения контура судна. Эхо-сигналы от поверхностного волнения моря, являющиеся помехами, исключают возможность непосредственного получения из матрицы эхо-сигналов информации о длине, ширине и курсе судна. Для этого необходимы специальные способы формирования изображения контура судна по радиолокационным наблюдениям. Оговорим прежде используемые далее определения связной области, биномизации и морфологической обработки изображения. Связная область – компактное множество пикселей, у каждого пикселя которого есть хотя бы один сосед, принадлежащий данному множеству. Пиксель – элемент изображения, в данном случае – элемент матрицы. Биномизация – преобразование матрицы с элементами произвольных значений в матрицу бинарных значений (элементы матрицы содержат 1 или 0) с помощью заданного порога. Морфологическая обработка биномизированной матрицы с помощью двумерного морфологического фильтра – исключение связных областей биномизированной матрицы, размеры которых меньше размеров двумерной матрицы морфологического фильтра. Известен способ выделения границ объектов на полутоновых изображениях [1] с помощью фильтров Собеля, Превита, Робертса и Канни, с помощью которых формируют изображение контура цели по двумерным (угол-расстояние) радиолокационным наблюдениям путем свертки матрицы наблюдений с маской (двумерная матрица) указанных фильтров. Двумерная матрица фильтра имеет центральный элемент. Процедура свертки (фильтрации) осуществляется путем последовательного перемещения матрицы фильтра с таким расчетом, чтобы ее центральный элемент поочередно совместился со всеми элементами матрицы эхо-сигналов. В каждом из таких положений выполняется суммирование поэлементного перемножения элементов матрицы фильтра с элементами матрицы эхо-сигналов, которые совпадают с элементами матрицы фильтра. Если результат суммирования превышает установленное заранее значение порога, то элементу результирующей матрицы (матрица изображения контура цели, полученная вследствие свертки матрицы эхо-сигналов с матрицей фильтра), координаты которого (номер строки, номер столбца) совпадают с координатами центрального элемента маски, присваивается значение 1, в противном случае – 0. Основным недостатком рассматриваемого способа являются то, что изображение контура морского судна искажено помехами от взволнованной поверхности моря. Этот факт объясняется тем, что радиолокационные эхо-сигналы кроме эхо-сигналов от корпуса судна содержат также эхо-сигналы от взволнованной поверхности моря, которые в данном случае рассматриваются как помехи. Применение фильтров Собеля, Превита, Робертса и Канни снижает уровень помех за счет суммирования поэлементного перемножения элементов матрицы фильтра с элементами матрицы эхо-сигналов, которые совпадают с элементами матрицы фильтра, но полностью не исключает помехи от взволнованной поверхности моря на изображении контура морского судна. Таким образом, рассматриваемый способ не содержит процедур, исключающих перечисленные недостатки. Таким образом, указанный способ выделения границ объектов на полутоновых изображениях не может быть использован для формирования изображения контура морского судна при полном подавлении помеховой компоненты от взволнованной поверхности моря. Известен способ [2] выделение контура на радиолокационном изображении на основе вейвлет-преобразования, с помощью которого из матрицы, содержащей эхо-сигналы от взволнованной поверхности моря и эхо-сигналы от радиолокационной цели, столбцы которой являются радиолокационными линейками наблюдений, соответствующими угловым положениям радиолокационной антенны, получают изображение контура радиолокационной цели путем формирования биполярной матрицы вейвлет-спектров столбцов матрицы эхо-сигналов. Рассматриваемый способ использует свойство вейвлетов, согласно которому они имеют как временную, так и частотную локализацию, т.е. с помощью вейвлетов можно выделить локальные пространственные неоднородности сигнала (контур цели), используя для этого частотные свойства вейвлета как фильтра с регулируемыми параметрами. В данном способе реализуется дискретная форма (так как наблюдения после АЦП имеют дискретный характер) непрерывного вейвлет-преобразования в виде высокочастотного фильтра, с помощью которого выполняется масштабируемая процедура дифференцирования (выделения контура цели), реализованная сверткой столбцов (линеек) матрицы эхо-сигналов с пси-функцией вейвлета для заданного масштаба (j) вейвлета. Пси-функция вейвлета представляет собой вектор, сумма элементов которого равна нулю, так как элементы первой половины вектора имеют положительные значения, а элементы второй – отрицательные. В ходе свертки с элементами радиолокационной линейки наблюдений вектор пси-функции последовательно перемещается вдоль линейки с таким расчетом, чтобы начальный элемент вектора поочередно совместился со всеми элементами линейки. В каждом из таких положений вектора пси-функции его элементы перемножаются с элементами линейки, а результат перемножения суммируется. Результат суммирования присваивается элементу результирующей линейки (линейка, полученная в результате данного вейвлет-преобразования), координаты которого совпадают с координатами первого элемента вектора пси-функции. Таким образом, в ходе последовательного перемещения пси-функции вдоль линейки для каждого положения пси-функции устанавливается значение различия между двумя смежными выборками линейки (совпадающими с первой и второй половинами элементов вектора пси-функции), размеры которых увеличиваются с ростом j. Результатом указанной свертки пси-функции вейвлета с эхо-сигналами от корпуса радиолокационной цели являются вейвлет-спектры в виде однополярных импульсов, положение которых на каждой линейке соответствует положению эхо-сигналов от отражающего элемента корпуса радиолокационной цели, тогда множество результирующих линеек образует матрицу вейвлет-спектров, на которой упомянутые однополярные импульсы образуют внешний контур корпуса радиолокационной цели. Результатом свертки пси-функции вейвлета с эхо-сигналами от поверхностного волнения моря является вейвлет-спектр помех в виде случайных биполярных импульсов. Таким образом, в целом матрица вейвлет-спектров эхо-сигналов, представляя собой сумму вейвлет-спектров эхо-сигналов от корпуса радиолокационной цели и поверхностного волнения, является биполярной матрицей вейвлет-спектров. С ростом параметра j увеличиваются размеры упомянутых ранее смежных выборок, т.е. увеличивается их усредняющее воздействие на помеховую компоненту, величина дисперсии вейвлет-спектра которой вследствие этого с увеличением j снижается. В тоже время амплитуды вейвлет-спектров эхо-сигналов от корпуса радиолокационной цели с ростом параметра j увеличиваются. Выбирая оптимальное значение масштаба j, добиваются наилучшего выделения контура корпуса радиолокационной цели. Для снижения уровня помех к вейвлет-спектрам применяется адаптивный порог. Основным недостатком рассматриваемого способа является то, что изображение контура морского судна искажено помехами от взволнованной поверхности моря. Указанный недостаток обусловлен тем, что в ходе свертки пси-функции вейвлета со столбцами (линейками) матрицы эхо-сигналов усредняющее действие вейвлета на случайную компоненту помехи выражается лишь в уменьшении дисперсии помеховой компоненты и не исключает ее полностью. Адаптивный уровень порогового ограничения элементов вейвлет-спектров ориентирован на поддержание лишь заданного уровня ложных тревог и не позволяет полностью подавит помеховую компоненту. При этом согласно рассматриваемому способу-прототипу из биполярной матрицы вейвлет-спектров эхо-сигналов не исключают элементы одноименной полярности, не содержащие вейвлет-спектров эхо-сигналов от корпуса судна, не устанавливают значение порога биномизации, при котором размеры связных множеств биномизированных элементов вейвлет-спектров эхо-сигналов от поверхностного волнения меньше размеров двумерной матрицы морфологического фильтра, не выполняют биномизацию матрицы вейвлет-спектров эхо-сигналов с помощью установленного порога биномизации, обеспечивающего исключение элементов вейвлет-спектров эхо-сигналов от взволнованной поверхности моря, с помощью указанного морфологического фильтра путем морфологической обработки сформированной биномизированной матрицы вейвлет-спектров не получают вейвлет-спектры эхо-сигналов в виде однополярных импульсов, положение которых на каждой радиолокационной линейке наблюдения соответствует положению эхо-сигналов от отражающего элемента корпуса судна и которые образуют внешний контур корпуса морского судна. Таким образом, указанный способ выделение контура на радиолокационном изображении на основе вейвлет-преобразования не может быть использован для формирования изображения контура морского судна при полном подавлении помеховой компоненты от взволнованной поверхности моря. Следовательно, остается нерешенной задача формирования изображения контура морского судна по двумерным (угол-расстояние) радиолокационным наблюдениям при полном подавлении помеховой компоненты от взволнованной поверхности моря. Известный способ выделение контура на радиолокационном изображении на основе вейвлет-преобразованвя, по своей технической сущности, функциональному назначению и достигаемому техническому результату является наиболее близким к заявляемому изобретению на способ формирования изображения контура морского судна по радиолокационным наблюдениям и рассматривается в дальнейшем в качестве способа-прототипа. В основу изобретения положена задача создания способа формирования изображения контура морского судна по радиолокационным наблюдениям при полном подавлении помеховой компоненты от взволнованной поверхности моря. При этом учитывается, что основными информационными элементами, которые предоставляет контур судна, являются длина, ширина и курс (пространственная ориентация продольной оси симметрии контура судна) судна. Поставленная задача решается тем, что в способе формирования изображения контура морского судна по радиолокационным наблюдениям, в котором формируют матрицу, содержащую эхо-сигналы от корпуса морского судна и от поверхностного волнения моря, столбцы которой являются радиолокационными линейками наблюдения для каждого углового положения антенны, представляющих собой последовательность дискретных отсчетов эхо-сигналов, для каждой i-й линейки, где i=1,2,…,q – номер линейки, получают биполярную матрицу вейвлет-спектров эхо-сигналов путем непрерывного вейвлет-преобразования столбцов матрицы эхо-сигналов, дополнительно из биполярной матрицы вейвлет-спектров эхо-сигналов исключают элементы одноименной полярности, не содержащие вейвлет-спектров эхо-сигналов от корпуса судна, устанавливают значение порога биномизации, при котором размеры связных множеств биномизированных элементов вейвлет-спектров эхо-сигналов от поверхностного волнения меньше размеров двумерной матрицы морфологического фильтра, выполняют биномизацию матрицы вейвлет-спектров эхо-сигналов с помощью установленного порога биномизации, обеспечивающего исключение элементов вейвлет-спектров эхо-сигналов от взволнованной поверхности моря, с помощью указанного морфологического фильтра путем морфологической обработки сформированной биномизированной матрицы вейвлет-спектров получают вейвлет-спектры эхо-сигналов в виде однополярных импульсов, положение которых на каждой радиолокационной линейке наблюдения соответствует положению эхо-сигналов от отражающего элемента корпуса судна и которые образуют внешний контур корпуса морского судна. В заявленном способе формирования контура морского судна по радиолокационным наблюдениям общими существенными признаками для него и для его способа-прототипа являются: – формирование матрицы, содержащей эхо-сигналы от корпуса морского судна и от поверхностного волнения моря, столбцы которой являются радиолокационными линейками наблюдения для каждого углового положения антенны, представляющих собой последовательность дискретных отсчетов эхо-сигналов, для каждой i-й линейки, где i=1,2,…,q – номер линейки; – получение биполярной матрицы вейвлет-спектров эхо-сигналов путем непрерывного вейвлет-преобразования столбцов матрицы эхо-сигналов. Сопоставительный анализ существенных признаков заявленного способа и способа-прототипа показывает, что первый, в отличие от способа-прототипа, имеет следующие существенные отличительные признаки: – исключение из биполярной матрицы вейвлет-спектров эхо-сигналов элементов одноименной полярности, не содержащих вейвлет-спектров эхо-сигналов от корпуса судна; – установление значения порога биномизации, при котором размеры связных множеств биномизированных элементов вейвлет-спектров эхо-сигналов от поверхностного волнения меньше размеров двумерной матрицы морфологического фильтра; – выполнение биномизации матрицы вейвлет-спектров эхо-сигналов с помощью установленного порога биномизации, обеспечивающего исключение элементов вейвлет-спектров эхо-сигналов от взволнованной поверхности моря, – получение с помощью указанного морфологического фильтра (путем морфологической обработки сформированной биномизированной матрицы) вейвлет-спектров эхо-сигналов в виде однополярных импульсов, положение которых на каждой радиолокационной линейке наблюдения соответствует положению эхо-сигналов от отражающего элемента корпуса судна и которые образуют внешний контур корпуса морского судна. Совокупность признаков, обеспечивающих достижение технического результата: – формирование матрицы, содержащей эхо-сигналы от корпуса морского судна и от поверхностного волнения моря, столбцы которой являются радиолокационными линейками наблюдения для каждого углового положения антенны, представляющих собой последовательность дискретных отсчетов эхо-сигналов, для каждой i-й линейки, где i=1,2,…,q – номер линейки; – получение биполярной матрицы вейвлет-спектров эхо-сигналов путем непрерывного вейвлет-преобразования столбцов матрицы эхо-сигналов; – исключение из биполярной матрицы вейвлет-спектров эхо-сигналов элементов одноименной полярности, не содержащих вейвлет-спектров эхо-сигналов от корпуса судна; – установление значения порога биномизации, при котором размеры связных множеств биномизированных элементов вейвлет-спектров эхо-сигналов от поверхностного волнения меньше размеров двумерной матрицы морфологического фильтра; – выполнение биномизации матрицы вейвлет-спектров эхо-сигналов с помощью установленного порога биномизации, обеспечивающего исключение элементов вейвлет-спектров эхо-сигналов от взволнованной поверхности моря, – получение с помощью указанного морфологического фильтра (путем морфологической обработки сформированной биномизированной матрицы) вейвлет-спектров эхо-сигналов в виде однополярных импульсов, положение которых на каждой радиолокационной линейке наблюдения соответствует положению эхо-сигналов от отражающего элемента корпуса судна и которые образуют внешний контур корпуса морского судна. Технический результат от применения заявленного способа формирования изображения контура морского судна по радиолокационным наблюдениям заключается в получении информации о геометрических размерах и угловом положении продольной оси контура судна при полном подавлении помеховой компоненты от взволнованной поверхности моря на изображении контура морского судна. Данная совокупность известных и отличительных существенных признаков достаточна и необходима для достижения заявленного технического результата. На основании изложенного можно заключить, что совокупность существенных признаков заявленного изобретения имеет причинно-следственную связь с достигаемым техническим результатом, т.е. благодаря данной совокупности существенных признаков изобретения стало возможным решить поставленную задачу. Следовательно, заявленное изобретение является новым, обладает изобретательским уровнем, т.е. оно явным образом не следует из уровня техники и пригодно для промышленного применения. Сущность заявленного способа формирования изображения контура морского судна по радиолокационным наблюдениям, поясняется чертежами: фиг.1. Внешний вид матрицы эхо-сигналов; – фиг.2. Внешний вид бинарной матрицы вейвлет-спектров эхо-сигналов от корпуса судна после обработки морфологическим фильтром. – фиг.3. Контур морского судна. Заявленный способ формирования изображения контура морского судна по радиолокационным наблюдениям реализуется операцией 1 формирования матрицы, содержащей эхо-сигналы от корпуса морского судна и от поверхностного волнения моря (фиг.1), столбцы которой являются радиолокационными линейками наблюдения для каждого углового положения антенны, представляющими собой последовательность дискретных отсчетов эхо-сигналов, для каждой i-й линейки, где i=1,2,…,q – номер линейки; операцией 2 получения биполярной матрицы вейвлет-спектров эхо-сигналов путем непрерывного вейвлет-преобразования столбцов матрицы эхо-сигналов; операцией 3 исключения из биполярной матрицы вейвлет-спектров эхо-сигналов элементов одноименной полярности, не содержащих вейвлет-спектров эхо-сигналов от корпуса судна; операцией 4 установления значения порога биномизации, при котором размеры связных множеств биномизированных элементов вейвлет-спектров эхо-сигналов от поверхностного волнения меньше размеров двумерной матрицы морфологического фильтра; операцией 5 выполнения биномизации матрицы вейвлет-спектров эхо-сигналов с помощью установленного порога биномизации, обеспечивающего исключение элементов вейвлет-спектров эхо-сигналов от взволнованной поверхности моря; операцией 6 получения с помощью указанного морфологического фильтра (путем морфологической обработки сформированной биномизированной матрицы) вейвлет-спектров эхо-сигналов в виде однополярных импульсов (фиг.2), положение которых на каждой радиолокационной линейке наблюдения соответствует положению эхо-сигналов от отражающего элемента корпуса судна и которые образуют внешний контур корпуса морского судна (фиг.3). Реализация заявленного способа формирования изображения контура морского судна по радиолокационным наблюдениям происходит следующим образом. В соответствии с правилами безопасного плавания судов минимальное расстояние между судами не может быть меньше их корабельных доменов, т.е. между судами всегда имеется гарантированное расстояние, не занятое судами. При этом СДЦ осуществляет «захват цели» таким образом, что отметка от цели (судна) всегда находится в центре двумерной выборки (угол-расстояние) радиолокационных наблюдений. Выборка, сформированная с помощью АЦП и соответствующая некоторому угловому положению антенны, в данном случае является фрагментом радиолокационной линейки наблюдений (далее – линейка). Следовательно, матрица эхо-сигналов (операция 1), полученная в течение одного оборота антенны радиолокатора, содержит в центральной части элементы, значения которых равны сумме эхо-сигналов от корпуса судна и поверхностного волнения моря, остальная часть элементов матрицы содержит только эхо-сигналы от поверхностного волнения моря. Из линеек, соответствующих каждому угловому положению антенны, формируется матрица эхо-сигналов
где Z0 (k, i) – матрица эхо-сигналов от корпуса морского судна; Для каждой i-й линейки формируется вейвлет-спектр с помощью дискретной формы непрерывного вейвлет-преобразования [3]
где Непрерывное вейвлет-преобразование представляет собой масштабируемую процедуру дифференцирования, реализованную сверткой столбца матрицы Z (линейки) и пси-функции Результатом свертки (2) пси-функции Результатом свертки (2) пси-функции Далее векторы вейвлет-спектра (2) для выбранного j группируются в биполярную матрицу Сj(b,i); i=1,2,…,q; В связи с тем, что положительные значения элементов матрицы Сj(b, i) не несут информацию о контуре судна (импульсы Uc имеют отрицательную полярность) и являются помеховыми компонентами вейвлет-спектра, то в дальнейшем рассматривается матрица Сj(b,i)–, в которой положительные элементы (помеховые компоненты) матрицы Сj (b,i) заменяются нулевыми значениями (операция 3). Указанный прием является одним из отличительных элементов способа формирования изображения контура морского судна на основе уменьшения связности элементов матрицы вейвлет-спектров. Его суть заключается в том, что после исключения положительных элементов из матрицы Сj(b, i) разрушается связность биполярных элементов вейвлет-спектра помех, так как положительные элементы помеховой компоненты заменяются нулевыми значениями – нулевые элементы разрушают связность вейвлет-спектров помех. В то же время на всех линейках отрицательные импульсы Uc, несущие информацию о геометрии корпуса судна, сохраняются и их связность не нарушается. Конкретное значение масштаба j для заданной пси-функции Далее для краткости матрица вейвлет-спектров обозначается Из матрицы вейвлет-спектров С выбирается та ее часть Отметим, что статистические характеристики поверхностного волнения моря определяются интенсивностью ветрового воздействия и характеристиками акватории, которые не изменяются в пределах локальной области, формирующей радиолокационные наблюдения, зафиксированные в матрице эхо-сигналов. Следовательно, выбранная матрица С обладает статистической представительностью вейвлет-спектра помех для всей матрицы С вейвлет-спектров эхо-сигналов. Другим отличительным элементом способа формирования изображения контура морского судна на основе уменьшения связности элементов помеховой компоненты матрицы С является определение порога биномизации р (операция 4), адаптивного к уровню вейвлет-спектра помех, к типу пси-функции Уменьшение связности на основе применения порога р обусловлено тем, что некоторая часть ненулевых помеховых компонент матрицы
где Процедура установления значения порога биномизации, при котором размеры связных множеств биномизированных элементов вейвлет-спектров эхо-сигналов от поверхностного волнения меньше размеров двумерной матрицы морфологического фильтра (операция 4), включает в себя морфологическую обработку бинарной матрицы вейвлет-спектра помех Указанную процедуру обозначим оператором М
Так как амплитуда вейвлет-спектра помех имеет случайный характер (в силу случайного характера эхо-сигналов от взволнованной поверхности), то значения элементов матрицы Оптимальное значение порога р определяется в ходе решения оптимизационной задачи
где Далее в ходе операции 5 аналогично правилу (3) выполняется биномизация матрицы вейвлет-спектров С с использованием полученного оптимального порога биномизации р При этом в силу обоснованной ранее репрезентативности статистических характеристик вейвлет-спектров помех матриц
элементы которой формируют изображение контура морского судна. Таким образом, формирование изображения контура морского судна выполняется при полном подавлении эхо-сигналов помеховой компоненты от поверхностного волнения моря. В настоящее время устройство, реализующее заявленный способ, находится в стадии макетирования. Макетирование выполнено применительно к береговой радиолокационной станции кругового обзора Центра СУДС порта Владивосток. Характеристики радиолокатора и судна: – ширина диаграммы направленности антенны – 0,39°; – частота дискретизации АЦП эхо-сигнала на выходе видеодетектора БРЛС – 75 МГц (линейный интервал дискретизации наблюдений – 2 м); – размеры судна: длина – 160 м, ширина – 28 м; – курс судна – 45°; – дистанция до судна – 1000 м; – угловой шаг антенны между двумя смежными радиолокационными линейками – 0,03°. Сформируем макет матрицы эхо-сигналов (1) в виде суммы главных компонент: эхо-сигналы от корпуса судна (Z0) и отражения от поверхностного волнения моря ( Распределение плотности вероятности эффективной площади рассеяния (ЭПР) названных отражателей описывается [5]: – экспоненциальным законом для ЭПР (S0) эхо-сигналов от корпуса судна
где – вейбулловским распределением для ЭПР (S
где c’=1/b’ – параметр формы, G – значение медианы распределения, определяемое интенсивностью волнения. Выберем модельные параметры Сформируем матрицу вейвлет-спектров С при выбранном масштабе j=3, обеспечивающем максимум отношения амплитуды импульсов Uc к дисперсии вейвлет-спектра помехи, и пси-функции Выберем морфологический фильтр bwmorph, тип=’majority’ [4] с размерами двумерного фильтра c×с=3×3 и параметром f=5, обладающий максимальным разрешением, что также обеспечивает достижение высокой точности формирования изображения контура судна. В результате моделирования решения оптимизационной задачи (5) на матрице Применение установленного порога р Так как матрица СBM представляет фигуру, образованную из единичных элементов, то указанная фигуры в горизонтальной плоскости имеет как внешние, так и внутренние границы, расстояние между которьми равно ширине упомянутой ранее области насыщения (ширина импульса Uc) и соответствующей ей мере неопределенности, которая при заданных Ближняя к радиолокатору часть корпуса судна представляет собой непрерывную отражающую поверхность борта судна, изображение контура которой в горизонтальной плоскости представлено непрерывными кривыми 1 и 2. Дальняя часть корпуса судна находится в зоне радиолокационной тени, поэтому при макетировании предусмотрено, что источниками формирования эхо-сигналов в этом случае являются отдельные облучаемые радиолокатором отражатели, имитирующие фальшборт и леерные ограждения палубы, расположенные на верхней кромке дальнего борта. Этим объясняется фрагментарность контура дальнего борта судна (кривые 3 и 4). Отсутствие фрагментов контура дальней части борта в кормовой части судна имитирует экранное действие кормовых надстроек, контур которых 5 сливается с изображением контура 2 в кормовой части судна. Следует отметить, что наличие внутренних и внешних границ фигуры, образованной единичными элементами матрицы С, не искажает формы контура судна и не вносит ошибок в определение размеров и курса судна. Так, кривые 1 и 3 или 2 и 4, взятые попарно, формируют изображение контура судна, позволяющее определить размеры и курс судна. При этом указанная неопределенность оказывает влияние лишь на определение точного расстояния до судна, ошибка определения которого в данной модельной ситуации не превышает 2 м (половина меры неопределенности), что составляет 0,2% (дистанция до судна в данном случае равна 1000 м). Изображение контура судна имеет ступенчатый вид, обусловленный дискретным характером формирования линеек наблюдений с помощью АЦП. Дальнейшее уменьшение углового шага радиолокационной антенны и увеличение частоты дискретизации АЦП позволяет увеличить число элементов в матрице эхо-сигналов и тем самым уменьшить размер ступеней и приблизить сформированное изображение контура судна к истинному профилю его корпуса в горизонтальной плоскости. Макетирование подтверждает возможность формирования изображения контура судна и определения на его основе размеров (длина – 160 м, ширина – 28 м) и курса К судна, совпадающего с продольной осью симметрии контура 6 и составляющего в данном случае 45° относительно направления на Север. При этом фон помехи от взволнованной поверхности моря на изображении контура судна полностью подавлен. Таким образом, полученные результаты подтверждают достижение технического результата от применения заявленного способа формирования изображения контура морского судна по радиолокационным наблюдениям, заключающегося в получении информации о геометрических размерах и угловом положении продольной оси контура судна при полном подавлении помеховой компоненты от взволнованной поверхности моря на изображении контура морского судна. Источники информации 1. Рудаков П.И., Сафонов И.В. Обработка сигналов и изображений. MATLAB 5.х/ Под общ. Ред. В.Г.Потемкина. М.: ДИАЛОГ-МИФИ. 2000. 416 с. – АНАЛОГ. 3. Дьяконов В.П. Вейвлеты. От теории к практике. М.: СОЛОН-Р, 2002. 448 с. 4. Дьяконов В.П. MATLAB. Обработка сигналов и изображений. Специальный справочник. СПб.: Питер. 2002. 608 с. Формула изобретения
Способ формирования изображения контура морского судна по радиолокационным наблюдениям, заключающийся в том, что формируют матрицу, содержащую эхо-сигналы от корпуса морского судна и от поверхностного волнения моря, столбцы которой являются радиолокационными линейками наблюдения для каждого углового положения антенны, представляющих собой последовательность дискретных отсчетов эхо-сигналов, для каждой i-й линейки, где i=1,2,…,q – номер линейки, получают биполярную матрицу вейвлет-спектров эхо-сигналов путем непрерывного вейвлет-преобразования столбцов матрицы эхо-сигналов, отличающийся тем, что из биполярной матрицы вейвлет-спектров эхо-сигналов исключают элементы одноименной полярности, не содержащие вейвлет-спектров эхо-сигналов от корпуса судна, устанавливают значение порога биномизации, при котором размеры связных множеств биномизированных элементов вейвлет-спектров эхо-сигналов от поверхностного волнения меньше размеров двумерной матрицы морфологического фильтра, выполняют биномизацию матрицы вейвлет-спектров эхо-сигналов с помощью установленного порога биномизации, обеспечивающего исключение элементов вейвлет-спектров эхо-сигналов от взволнованной поверхности моря, с помощью указанного морфологического фильтра путем морфологической обработки сформированной биномизированной матрицы вейвлет-спектров получают вейвлет-спектры эхо-сигналов в виде однополярных импульсов, положение которых на каждой радиолокационной линейке наблюдения соответствует положению эхо-сигналов от отражающего элемента корпуса судна и которые образуют внешний контур корпуса морского судна.
РИСУНКИ
|
||||||||||||||||||||||||||

 (k, i) – матрица эхо-сигналов (помех) от взволнованной поверхности моря;
(k, i) – матрица эхо-сигналов (помех) от взволнованной поверхности моря;  – порядковый номер отсчета АЦП на линейке; n – максимальное число отсчетов АЦП на линейке; i=1,2,…,q – номер линейки, q – выбранное число линеек в матрице Z.
– порядковый номер отсчета АЦП на линейке; n – максимальное число отсчетов АЦП на линейке; i=1,2,…,q – номер линейки, q – выбранное число линеек в матрице Z.
 0 – базисная пси-функция вейвлета; j – параметр масштаба;
0 – базисная пси-функция вейвлета; j – параметр масштаба;  – координата положения пси-функции на линейке; h – число элементов вектора пси-функции
– координата положения пси-функции на линейке; h – число элементов вектора пси-функции  , где abs(.) – оператор абсолютного значения.
, где abs(.) – оператор абсолютного значения. , которая содержит только вейвлет-спектры помех. Так как наблюдения (1) сформированы таким образом, что эхо-сигналы от корпуса судна располагаются в центральной части матрицы Z (k,i), то, соответственно, имеется возможность выбрать ту часть матрицы вейвлет-спектров, которая заведомо не содержит вейвлет-спектры эхо-сигналов от корпуса судна.
, которая содержит только вейвлет-спектры помех. Так как наблюдения (1) сформированы таким образом, что эхо-сигналы от корпуса судна располагаются в центральной части матрицы Z (k,i), то, соответственно, имеется возможность выбрать ту часть матрицы вейвлет-спектров, которая заведомо не содержит вейвлет-спектры эхо-сигналов от корпуса судна.
 ,
,  ,
,  – элемент матрицы
– элемент матрицы  с помощью двумерного морфологического фильтра (морфологический фильтр [4]).
с помощью двумерного морфологического фильтра (морфологический фильтр [4]).
 при выбранных размерах c×c двумерной матрицы морфологического фильтра зависят от величины порога р. Чем больше порог р, тем меньше связность множеств биномизированных элементов вейвлет-спектров помех и, соответственно, меньше значения элементов матрицы
при выбранных размерах c×c двумерной матрицы морфологического фильтра зависят от величины порога р. Чем больше порог р, тем меньше связность множеств биномизированных элементов вейвлет-спектров помех и, соответственно, меньше значения элементов матрицы 
 – целевая функция оптимизационной задачи;
– целевая функция оптимизационной задачи;  – элементы матрицы
– элементы матрицы  , размеры связных множеств биномизированных элементов вейвлет-спектров эхо-сигналов от поверхностного волнения меньше размеров двумерной матрицы морфологического фильтра, что обеспечивает полное исключение элементов вейвлет-спектра помех из матрицы
, размеры связных множеств биномизированных элементов вейвлет-спектров эхо-сигналов от поверхностного волнения меньше размеров двумерной матрицы морфологического фильтра, что обеспечивает полное исключение элементов вейвлет-спектра помех из матрицы 
 – среднее значение ЭПР корпуса судна в угловом секторе диаграммы направленности антенны;
– среднее значение ЭПР корпуса судна в угловом секторе диаграммы направленности антенны;
 , сформируем [5] в указанных соотношениях матрицу эхо-сигналов от корпуса судна и поверхностного волнения моря (фиг.1). Как следует из фиг.1 эхо-сигналы от корпуса судна существенно искажены высоким уровнем помех от взволнованной поверхности моря.
, сформируем [5] в указанных соотношениях матрицу эхо-сигналов от корпуса судна и поверхностного волнения моря (фиг.1). Как следует из фиг.1 эхо-сигналы от корпуса судна существенно искажены высоким уровнем помех от взволнованной поверхности моря.