Патент на изобретение №2308050
|
||||||||||||||||||||||||||
(54) СПОСОБ ИЗМЕРЕНИЯ ЭФФЕКТИВНОЙ ПЛОЩАДИ РАССЕЯНИЯ НАЗЕМНЫХ ОБЪЕКТОВ РАДИОЛОКАТОРОМ С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ
(57) Реферат:
Изобретение относится к способам и технике измерений характеристик рассеяния радиолокационных целей, в частности к измерению эффективной площади рассеяния (ЭПР) наземных объектов авиационными радиолокационными станциями бокового обзора с синтезированной апертурой антенны (РСА). Техническим результатом изобретения является уменьшение погрешности измерения ЭПР наземных объектов. Способ измерения эффективной площади рассеяния наземных объектов РСА на основе абсолютной амплитудной калибровки тракта РСА включает использование системы внешней (наземной) калибровки (СВК) в виде наборов эталонных уголковых отражателей (УО), размещенных на однородном участке земной поверхности, аэросъемку с использованием РСА этого участка земной поверхности при заданных значениях высоты и курса полета носителя, получение радиолокационных изображений (РЛИ) участка земной поверхности с эталонными УО, измерение на полученном РЛИ параметров изображения каждого эталонного отражателя, обработку результатов измерений и оценку параметров калибровки сквозного тракта РСА и ЭПР наземных объектов. 6 ил.
Область техники Изобретение относится к способам и технике измерений характеристик рассеяния радиолокационных целей, в частности к измерению эффективной площади рассеяния (ЭПР) наземных объектов авиационными радиолокационными станциями бокового обзора с синтезированной апертурой антенны (РСА), и может быть использовано для повышения эффективности мониторинга земной поверхности на основе решения задачи абсолютной калибровки тракта РСА и формируемых ими радиолокационных изображений (РЛИ) с использованием эталонных наземных пассивных отражателей. Уровень техники. В настоящее время в мире создано большое количество комплексов дистанционного зондирования Земли (ДЗЗ), в состав которых входят РСА. Тематическая обработка результатов зондирования, полученных с помощью РСА, является эффективной только при условии получения ими данных об абсолютной величине удельной эффективной поверхности рассеяния (УЭПР) Под калибровкой РСА понимают решение задачи адекватного описания математической модели (ММ) передаточной функции (ПФ) сквозного тракта РСА на основе применения для оценки параметров ММ наземных эталонных средств (искусственных активных ретрансляторов, пассивных отражателей или поверхностно-распределенных объектов естественного происхождения) и учета результатов оценки ММ ПФ при формировании РЛИ. В ММ ПФ сквозного тракта при калибровке РСА включают: трассу распространения сигнала, антенную систему, приемно-передающий канал, систему регистрации данных, процессор восстановления РЛИ из радиоголограммы (синтезирования), а также методику измерения параметров наземных эталонных средств и объектов наблюдения на РЛИ в интересах оценки их ЭПР. Известные подходы к решению задачи измерения ЭПР наземных объектов с применением калиброванных РСА (см. Д.М.Бычков, А.С.Гавриленко, Е.М.Ганапольский, и др. “Комбинированная калибровка радиолокаторов бокового обзора с реальной и синтезированной апертурой”. Успехи современной радиоэлектроники, 2005, №6; Белокуров А.А., Глыбовский С.И. “Методы и средства калибровки радиолокационных систем дистанционного наблюдения земной поверхности”. Зарубежная радиоэлектроника, 1990, №2) показывают, что проблема абсолютной калибровки авиационных и космических РСА решена не полнотстью, а применяемые для ее решения способы, эталонные инструментальные средства и алгоритмы оценки имеют ряд недостатков, которые ограничивают достижимые значения погрешности калибровки и оценки ЭПР объектов. Один из недостатков этих подходов заключается в неполном учете особенности формирования РЛИ в РСА. При выполнении процедуры калибровки в указанных работах используют уравнение связи между мощностью сигнала на входе приемника РСА, отраженного от исследуемого объекта, и его ЭПР (
где Рпр – мощность сигнала на входе приемника РСА; Ризл – средняя мощность излучаемого сигнала; G(
Rн – наклонная дальность до исследуемого объекта; Кппо – коэффициент передачи тракта приема, преобразования и обработки РСА;
Уравнение справедливо для РЛС кругового (секторного) обзора, в которых время облучения объекта практически не зависит от дальности до объекта (определяется отношением ширины диаграммы направленности антенны по азимуту к угловой скорости сканирования антенны). Калибровка сквозного тракта РСА на основе этого уравнения приводит к неполному учету зависимости ее ПФ от наклонной дальности Rн до калибруемого (оцениваемого) объекта и дополнительным погрешностям в оценках ЭПР измеряемых объектов. В радиолокаторах бокового обзора (включая РСА) время облучения объекта увеличивается пропорционально наклонной дальности до него
где
В этом уравнении мощность сигнала на входе приемника РСА обратно пропорциональна не четвертой, а третьей степени наклонной дальности до объекта. При использовании для калибровки РСА пассивных отражателей, в указанных работах, не учитывают в явном виде зависимость индикатрис их отражения от углов визирования по азимуту и углу места, полагая значение Важно отметить, что ЭПР пассивного отражателя, установленного на местности, может существенно отличаться от значения, измеренного на стенде в безэховой камере, из-за влияния интерференционного множителя, обусловленного влиянием отражений от земной поверхности в диапазоне рабочих углов визирования РСА по углу места. Предлагаемые в указанных выше работах способы минимизации этих отражений на основе покрытия радиопоглощающим материалом соответствующих участков земной поверхности в окрестности отражателей являются дорогостоящими и трудоемкими. Известно, что выходной сигнал РСА существенно зависит от траекторных нестабильностей полета носителя, а применяемые в современных РСА методы обработки сигналов не обеспечивают полной компенсации их влияния. Современные способы калибровки РСА не предусматривают учета изменений амплитуды огибающей РЛИ эталонных отражателей из-за неполной компенсации влияния указанных нестабильностей, что приводит к дополнительным погрешностям в оценках амплитуды РЛИ эталонных отражателей и соответствующей составляющей погрешности калибровки. При решении задачи калибровки цифровых РСА в оценке амплитуды огибающей РЛИ отражателя, которая используется в качестве эталонного параметра в процедуре амплитудной калибровки тракта РСА, не учитывается дискретная структура РЛИ, что приводит к неучтенной погрешности калибровки до 1.5 дБ. Наиболее близким к предлагаемому способу измерения эффективной площади рассеяния наземных объектов радиолокатором с синтезированной апертурой антенны является техническое решение, описанное в статье Белокурова А.А., Глыбовского С.И. “Методы и средства калибровки радиолокационных систем дистанционного наблюдения земной поверхности”. Зарубежная радиоэлектроника, 1990, №2, которое принимается в качестве прототипа. Предлагаемое изобретение направлено на достижение технического результата, заключающегося в уменьшении погрешности измерения ЭПР наземных объектов РСА на основе абсолютной калибровки сквозного тракта РСА при использовании в качестве системы абсолютной калибровки набора пассивных уголковых отражателей (УО), размещенных специальным образом на земной поверхности за счет уточнения ММ ПФ сквозного тракта РСА, а также процедур идентификации параметров ММ и системы калибровки. Поставленная задача достигается тем, что в способе измерения эффективной площади рассеяния наземных объектов радиолокатором с синтезированной апертурой (РСА) на основе абсолютной амплитудной калибровки тракта РСА, включающем использование системы внешней (наземной) калибровки (СВК) в виде наборов эталонных УО, размещенных на однородном участке земной поверхности, аэросъемку с использованием РСА этого участка земной поверхности при заданных значениях высоты и курса полета носителя, получение РЛИ участка земной поверхности с эталонными УО, измерение на полученном РЛИ параметров изображения каждого эталонного отражателя, обработку результатов измерений и оценку параметров калибровки сквозного тракта РСА и ЭПР наземных объектов, в качестве набора эталонных отражателей используют две линейки пассивных трехгранных УО, при этом первую линейку с одинаковыми расчетными значениями ЭПР отражателей размещают с равномерным шагом по наклонной дальности (поперек направления полета носителя) в пределах полосы обзора РСА, а вторую, с различными расчетными значениями ЭПР, размещают по линии, проходящей через средний УО первой линейки ортогонально к ней (по азимуту). Фактические значения ЭПР каждого эталонного УО, входящего в СВК, определяют путем предварительного измерения в безэховой камере главных сечений индикатрис отражения УО по азимуту
Максимальные значения амплитуд
а площади ее сечения при наличии Si и отсутствии рассогласований So определяют на уровне 0.5Ai max по значениям произведения ширины огибающих в двух ортогональных сечениях (по линии фактического пути – Для минимизации влияния интерференционного множителя земли калибровочный коэффициент Kkal сквозного тракта РСА определяют как среднее значение оценок калибровочных коэффициентов Кkal(i), рассчитанных для всех калибровочных УО в линейке по дальности
при этом оценки калибровочных коэффициентов Kkal(i) для каждого УО определяют отношением амплитуд интерполированных огибающих i-го УО
где
Значения ЭПР точечных объектов на произвольном (калибровочном и измерительном) РЛИ определяют по уравнению
где Кkal – калибровочный коэффициент сквозного тракта РСА; Rizmn – наклонная дальность до точечного объекта на измерительном РЛИ; G( отношение коэффициентов усиления сквозного тракта РСА по амплитуде в режимах измерений и калибровки
Значения ЭПР пространственно-распределенных объектов на произвольном (калибровочном и измерительном) РЛИ определяют по уравнению
где
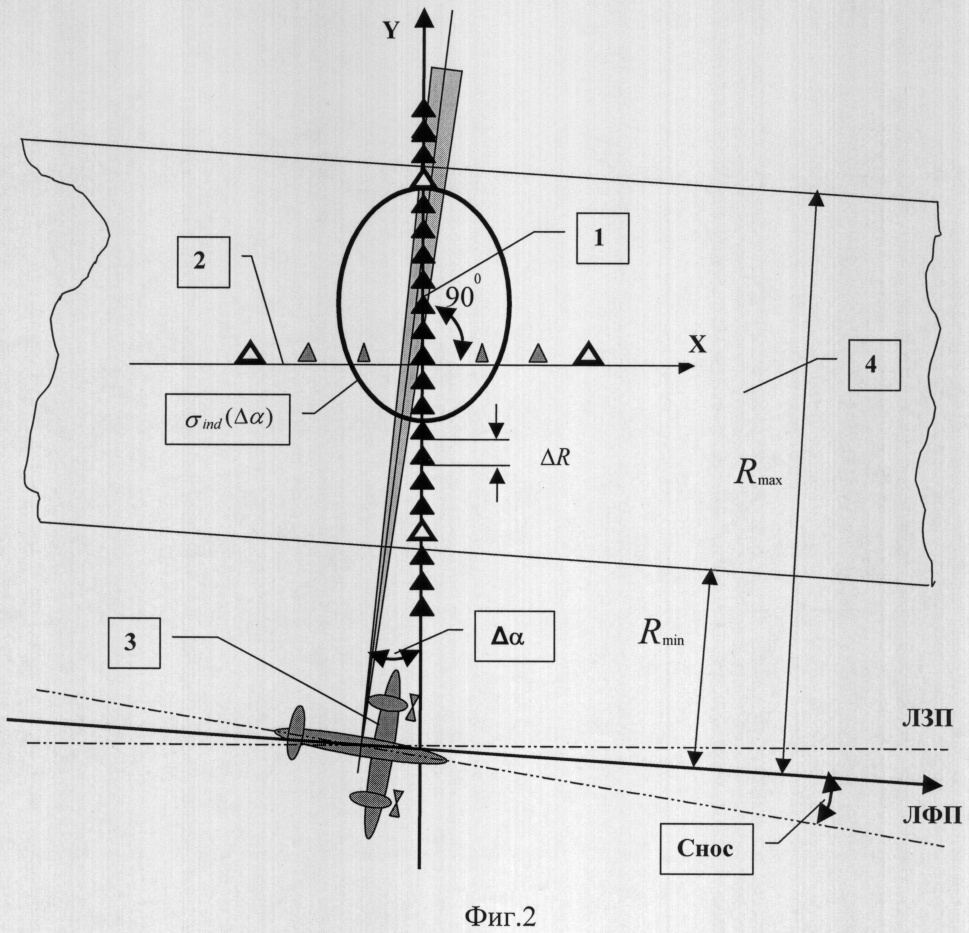
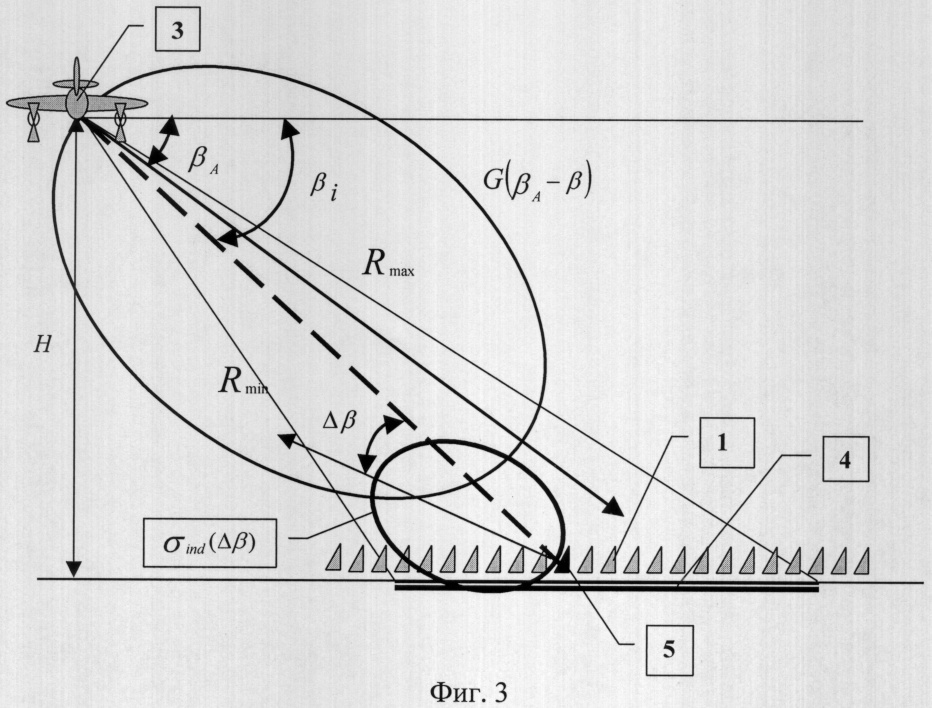
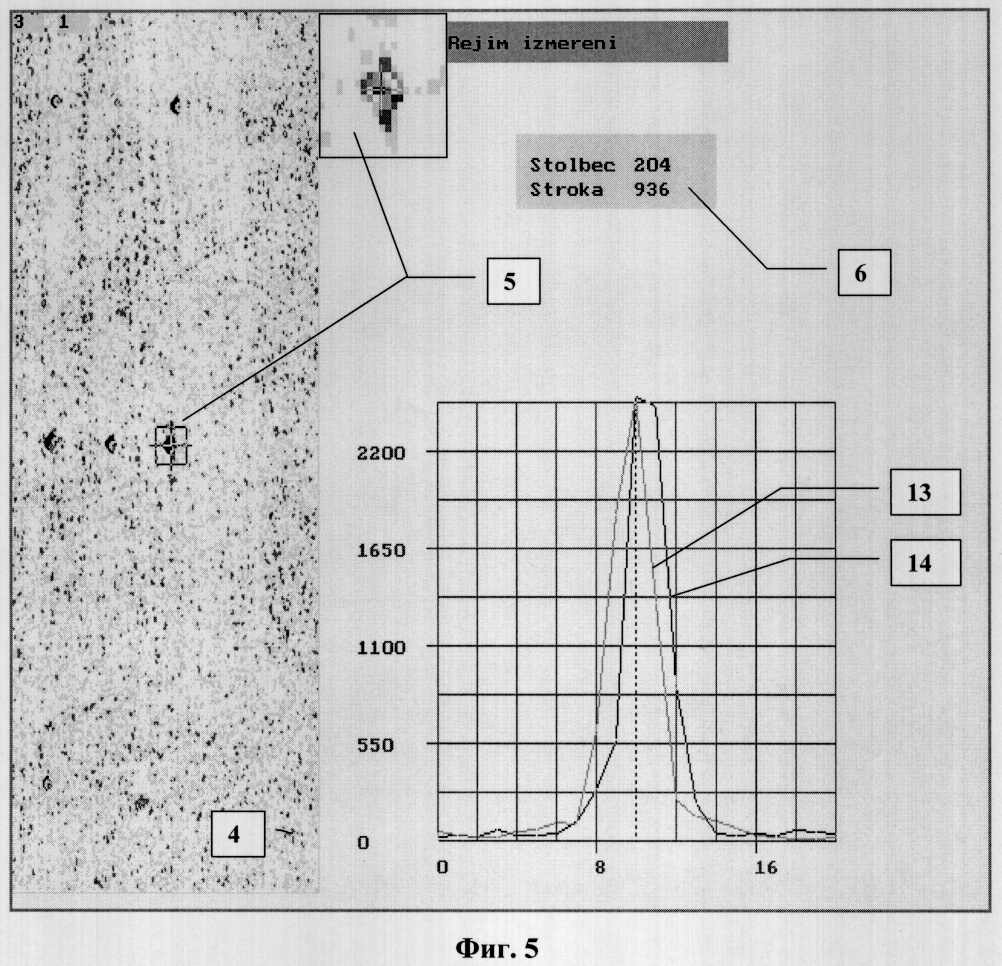
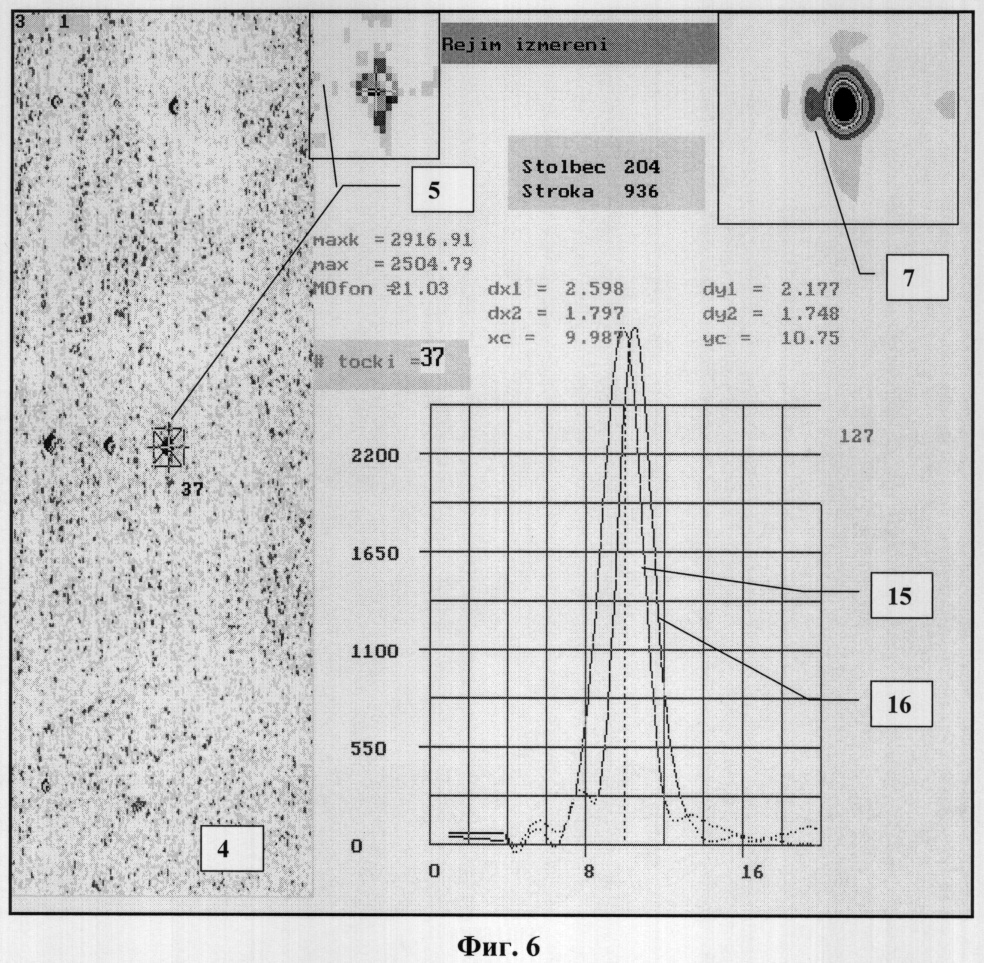
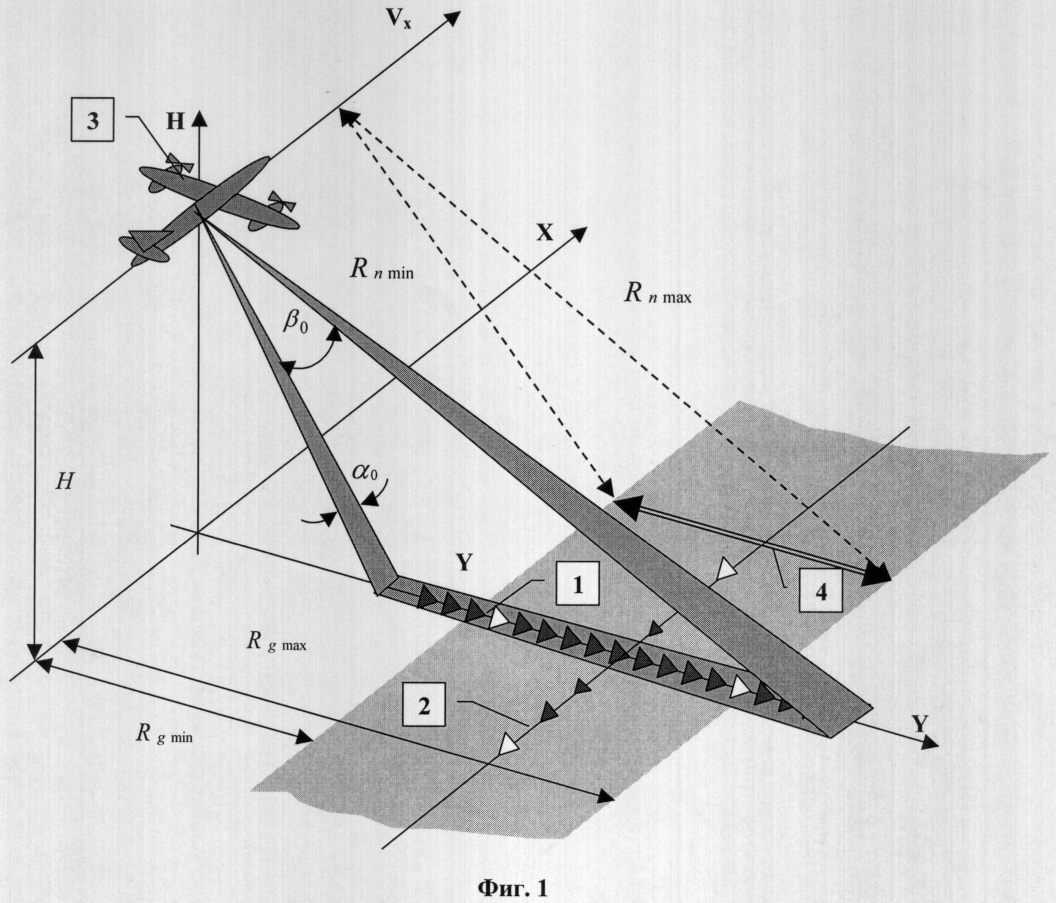
S0 – площадь элемента разрешения измерительного РЛИ (принимается равной ее значению, полученному при проведении процедуры калибровки). Предложенный способ обеспечивает уменьшение погрешности измерения ЭПР наземных объектов за счет абсолютной калибровки сквозного тракта РСА на основе применения набора пассивных уголковых отражателей (УО), размещенных специальным образом на земной поверхности, уточнения ММ ПФ РСА и может быть использован для существенного повышения эффективности использования РСА в авиационных системах мониторинга земной поверхности. Изобретение поясняется чертежами, на которых: На фиг.1 показана схема установки на земной поверхности СВК из двух линейных наборов эталонных пассивных УО, размещенных ортогонально на однородном участке поперек и вдоль направления полета носителя в пределах полосы обзора РСА (1 – линейка УО по дальности, 2 – линейка УО по линии пути; 3 – самолет-носитель; 4 – полоса обзора РСА). На фиг.2 показаны геометрические соотношения, иллюстрирующие процедуру калибровки РСА в режиме бокового обзора при съемке набора эталонных пассивных УО в горизонтальной плоскости (1 – линейка УО по дальности, 2 – линейка УО по линии пути; 3 – самолет-носитель; 4 – полоса обзора РСА; ЛЗП – линия заданного пути; ЛФП – линия фактического пути; Снос – угол сноса самолета – носителя). На фиг.3 показаны геометрические соотношения, иллюстрирующие процедуру калибровки РСА в режиме бокового обзора при съемке набора эталонных пассивных УО в вертикальной плоскости (1 – линейка УО по дальности, 3 – самолет-носитель; 4 – полоса обзора РСА; 5 – измеряемый УО). На фиг.4 иллюстрируются характерный вид индикатрис отражения УО в горизонтальной и вертикальной плоскостях и результаты аппроксимации полиномами 9-й степени (9, 11 – графики измерения и аппроксимации главного сечения индикатрисы отражения УО по азимуту; 10, 12 – графики измерения и аппроксимации главного сечения индикатрисы отражения УО по углу места). На фиг.5 представлен экспериментальный фрагмент исходного РЛИ с эталонными УО (5 – выделенный прямоугольный фрагмент исходного РЛИ измеряемого УО размером n×n пикселей; 6 – номера 1-го столбца и 1-й строки выделенного прямоугольного фрагмента в системе координат измерительного РЛИ; 13, 14 – огибающие главных сечений исходного РЛИ отражателя по дальности и азимуту соответственно). На фиг.6 представлен фрагмент исходного РЛИ с эталонными УО после интерполяционного восстановления огибающей с использованием модифицированной процедуры двумерного БПФ (5 – выделенный прямоугольный фрагмент исходного РЛИ измеряемого УО размером n×n пикселей, 6 – номера 1-го столбца и 1-й строки выделенного прямоугольного фрагмента в системе коордного РЛИ; интерполированного РЛИ измеряемого УО размером n×n пикселей; 7 – интерполированный фрагмент 5 РЛИ измеряемого УО размером n×n пикселей; 15, 16 – огибающие главных сечений РЛИ отражателя по дальности и азимуту). Предлагаемый способ осуществляется следующим образом. В способе измерения ЭПР объектов, включающем (фиг.1, 2) использование СВК из двух линейных наборов пассивных УО, размещенных ортогонально на однородном участке земной поверхности вдоль 1 и поперек 2 направления полета носителя РСА 3, аэросъемку участка земной поверхности с УО в полосе обзора 4 калибруемого РСА при заданных значениях дальности, высоты и курса полета носителя, получение РЛИ этого участка земной поверхности, а также систему цифровой автоматизированной обработки, в которой оценку параметров РЛИ каждого УО системы внешней калибровки и идентификацию параметров ММ ПФ калибруемого РСА выполняют в соответствии со следующими процедурами. 1. Процедура калибровки: – все рассмотренные ниже процедуры калибровки используют зависимость амплитуды Аmax выходного сигнала РСА (амплитуда РЛИ) от корня квадратного
где Kkal – коэффициент передачи калибруемой РСА; G( Rн – наклонная дальность до исследуемого объекта, которая для измерительных цифровых РСА является линейной в широком динамическом диапазоне изменения ЭПР; – на полученном для калибровки РЛИ последовательно выделяют (фиг.5) прямоугольные фрагменты 6 размером nx×ny пикселей с изображением УО в центре фрагмента 5 и оценивают координаты выделенного фрагмента Yф, Хф в системе координат РЛИ (“наклонная дальность (Y0) – линия фактического пути (Х0) носителя РСА”); – выполняют (фиг.6) процедуру двумерной интерполяции в К раз (К=2n, n=1, 2, …) для каждого выделенного фрагмента 6 изображения УО с использованием алгоритма интерполяции на основе двумерного преобразования Фурье, модифицированного с целью уменьшения погрешности двумерной интерполяции, и получают интерполированное изображение 7 фрагмента 6; – измеряют (фиг.6) параметры главных сечений огибающей 15, 16 интерполированного РЛИ 7 каждого УО, прямоугольные координаты УО в системе координат выделенного фрагмента (dX, dY), максимальную амплитуду Aimax огибающей, а также значения ее ширины в двух ортогональных сечениях (в направлении, совпадающем с линией фактического пути – – корректируют искажения максимальной амплитуды огибающей Aimax из-за влияния рассогласований в системе обработки согласно выражению
где Si= – оценивают фактические угловые параметры визирования каждого УО по азимуту – эталонные значения ЭПР каждого УО, входящего в СВК, определяют путем предварительного измерения в безэховой камере главных сечений индикатрис отражения УО по азимуту 9
– значения – калибровочный коэффициент сквозного тракта РСА для исключения (минимизации) влияния интерференционного множителя земли определяют как среднее значение оценок калибровочных коэффициентов для всех УО в линейке по дальности калибровочного РЛИ
при этом оценки калибровочных коэффициентов Kkal(i) для каждого УО определяют отношением амплитуд интерполированных огибающих i-го УО
где
2. Процедура оценки ЭПР точечных объектов: – эффективную площадь рассеяния точечных наземных объектов на произвольном (калибровочном и измерительном) РЛИ определяют по уравнению
где Kkal – коэффициент передачи (калибровки) РСА; Rizmn – наклонная дальность до точечного объекта на измерительном РЛИ; G( отношение коэффициентов усиления сквозного тракта РСА по амплитуде в режимах измерений и калибровки
3. Процедура оценки ЭПР пространственно-распределенных объектов: – эффективную площадь рассеяния пространственно-распределенных наземных объектов на произвольном (калибровочном и измерительном) РЛИ определяют по уравнению
где Kkal – коэффициент передачи (калибровки) РСА;
Sizm – площадь элемента разрешения измерительного РЛИ (принимается равной ее оценке при проведении процедуры калибровки). Пример применения предложенного способа Предлагаемый способ измерения эффективной площади рассеяния наземных объектов РСА апробирован в ФГУП “ЛИИ им. М.М.Громова” при выполнении научно-исследовательской и опытно-конструкторской работы (НИОКР) по разработке и созданию “Авиационного комплекса (АК) для экологического мониторинга и исследования природных ресурсов Земли”. При проведении НИР были реализованы основные методические процедуры, обеспечивающие получение результата калибровки и измерений с погрешностью, соответствующей потенциальным возможностям предлагаемого способа. В процессе экспериментов были получены РЛИ системы наземной калибровки РСА в сантиметровом диапазоне. Результаты измерений и обработки представлены в таблице 1. Для определения положения жестко закрепленной на фюзеляже самолета физической антенны РСА по углу места в экспериментах проводились синхронные измерения угловых положений антенны и самолета. В экспериментах использовалась НСК, включающая линейку, по дальности составленную из 9 УО с расчетными значениями ЭПР 3000 м2, установленных с равномерным шагом 500 м, и 4 УО, установленных ортогонально отражателям линейки на однородной подстилающей поверхности типа “луг-летом”.
Для всех УО системы калибровки в безэховой камере были измерены главные сечения их индикатрис отражения на рабочей длине волны передатчика РСА. Для проверки работоспособности и точности предлагаемого способа измерения ЭПР были выбраны три фрагмента РЛИ, включающих изображения УО системы калибровки. Для всех отобранных РЛИ была выполнена процедура калибровки путем обработки изображений эталонных УО в соответствии с описанными ранее процедурами. Затем по каждому из отобранных РЛИ была выполнена процедура измерений ЭПР эталонных УО для всех трех РЛИ. Результаты, представленные в таблице 1, показывают, что процедура измерения коэффициента калибровки по любому из трех фрагментов дает устойчивые значения оценок, максимальная разница которых не превысила 5%. При измерении ЭПР эталонных УО на фрагментах РЛИ с использованием результатов калибровки текущего фрагмента среднее значение погрешности измерений не превышает 10%. Оценки, полученные при использовании для калибровки тракта РСА любого из этих фрагментов и измерении ЭПР УО на двух других (измерительных) фрагментах РЛИ, показали, что средние значения погрешностей оценок ЭПР на измерительных РЛИ также не превысили 10%. Таким образом, полученные экспериментальные данные подтвердили высокую эффективность предложенного способа оценки ЭПР наземных объектов на основе решения задачи абсолютной калибровки тракта РСА и формируемых ими РЛИ с использованием наземных эталонных УО пассивного типа при существенном уменьшении погрешности оценок ЭПР по сравнению с известными способами.
Формула изобретения
Способ измерения эффективной площади рассеяния наземных объектов радиолокатором с синтезированной апертурой (РСА) на основе абсолютной амплитудной калибровки тракта РСА, включающий систему внешней калибровки (СВК) в виде наборов эталонных уголковых отражателей (УО), размещенных на однородном участке земной поверхности, аэросъемку с использованием РСА этого участка земной поверхности при заданных значениях высоты и курса полета носителя, получение радиолокационного изображения (РЛИ) участка земной поверхности с эталонными УО, измерение на полученном РЛИ параметров изображения каждого эталонного отражателя, обработку результатов измерений и оценку параметров калибровки сквозного тракта РСА и ЭПР наземных объектов, отличающийся тем, что в качестве набора эталонных отражателей используют две линейки пассивных трехгранных УО, при этом, первую линейку с одинаковыми расчетными значениями ЭПР отражателей размещают с равномерным шагом по наклонной дальности (поперек направления полета носителя) в пределах полосы обзора РСА, а вторую по линии, проходящей через средний УО первой линейки ортогонально к ней (по азимуту), фактические значения ЭПР каждого эталонного УО определяют путем предварительного измерения в безэховой камере главных сечений индикатрис отражения по азимуту
максимальные значения амплитуд
в котором параметры Si и So определяют по значениям произведения ширины главных сечений двумерной огибающей РЛИ отражателя на уровне 0,5 Аimax (по линии фактического пути –
при этом, оценки калибровочных коэффициентов Kkal(i) для каждого УО определяют отношением амплитуд интерполированных огибающих i-го УО где
значения ЭПР точечных объектов на произвольном (калибровочном и измерительном) РЛИ определяют по уравнению
где Kkal – калибровочный коэффициент сквозного тракта РСА; Rizmn – наклонная дальность до точечного объекта на измерительном РЛИ; G(
а значения ЭПР пространственно-распределенных объектов на произвольном (калибровочном и измерительном) РЛИ определяют по уравнению
где S0 – площадь элемента разрешения измерительного РЛИ (принимают равной ее значению, полученному при проведении калибровки).
РИСУНКИ
|
||||||||||||||||||||||||||
 0 исследуемых объектов. Получение указанных данных с использованием авиационных и космических РСА возможно только при проведении абсолютной калибровки сквозного тракта РСА и получаемых ими РЛИ.
0 исследуемых объектов. Получение указанных данных с использованием авиационных и космических РСА возможно только при проведении абсолютной калибровки сквозного тракта РСА и получаемых ими РЛИ.
 ) – диаграмма направленности физической антенны РСА по мощности в вертикальной плоскости с шириной диаграммы по углу места
) – диаграмма направленности физической антенны РСА по мощности в вертикальной плоскости с шириной диаграммы по углу места  – длина волны излучаемого РСА сигнала;
– длина волны излучаемого РСА сигнала; , при этом передаточная функция тракта приема, преобразования и обработки РСА
, при этом передаточная функция тракта приема, преобразования и обработки РСА  (см. Г.С.Кондратенков, В.А.Потехин, А.П.Реутов, Ю.А.Феоктистов “Радиолокационные станции бокового обзора”. Советское радио, 1985 г.) и уравнение связи между мощностью сигнала на входе приемника РСА и ЭПР объекта преобразуется к виду
(см. Г.С.Кондратенков, В.А.Потехин, А.П.Реутов, Ю.А.Феоктистов “Радиолокационные станции бокового обзора”. Советское радио, 1985 г.) и уравнение связи между мощностью сигнала на входе приемника РСА и ЭПР объекта преобразуется к виду

 0 – ширина диаграммы направленности физической антенны РСА по азимуту,
0 – ширина диаграммы направленности физической антенны РСА по азимуту, п – скорость полета носителя РСА.
п – скорость полета носителя РСА. const в диапазонах рабочих углов калибровки. Экспериментальные измерения индикатрис отражения большой группы уголковых отражателей с трехгранными и квадратными гранями (см. Сазонов Н.И. и др. “Система наземной калибровки РСА”, ЛИИ им. М.М.Громова, Руководство по эксплуатации, 2005), изготовленными по единой технологии, показал, что их индикатрисы отражения имеют значительный (до 1,5…2 дБ) разброс от образца к образцу в диапазоне рабочих углов ±15° от максимума. Для уменьшения влияния указанного разброса значений ЭПР пассивных эталонных отражателей на погрешность калибровки РСА в методологии калибровки необходимо учитывать фактические зависимости их индикатрис отражения от углов визирования
const в диапазонах рабочих углов калибровки. Экспериментальные измерения индикатрис отражения большой группы уголковых отражателей с трехгранными и квадратными гранями (см. Сазонов Н.И. и др. “Система наземной калибровки РСА”, ЛИИ им. М.М.Громова, Руководство по эксплуатации, 2005), изготовленными по единой технологии, показал, что их индикатрисы отражения имеют значительный (до 1,5…2 дБ) разброс от образца к образцу в диапазоне рабочих углов ±15° от максимума. Для уменьшения влияния указанного разброса значений ЭПР пассивных эталонных отражателей на погрешность калибровки РСА в методологии калибровки необходимо учитывать фактические зависимости их индикатрис отражения от углов визирования 
 и
и  степень n которых выбирают из условия реализации погрешности аппроксимации не более 0.5 дБ и расчета эталонных значений ЭПР каждого i-го отражателя в каждом сеансе калибровки в соответствии с формулой
степень n которых выбирают из условия реализации погрешности аппроксимации не более 0.5 дБ и расчета эталонных значений ЭПР каждого i-го отражателя в каждом сеансе калибровки в соответствии с формулой
 отражателей на РЛИ определяют по максимальным амплитудам огибающих изображений УО, восстановленных путем двумерной интерполяции квадратных наборов цифровых отсчетов (пикселей) в окрестности каждого отражателя размером nх×nу с использованием алгоритма интерполяции на основе двумерного преобразования Фурье, модифицированного с целью уменьшения погрешности интерполяции. Для этого измеряют максимальную амплитуду интерполированной огибающей РЛИ Аi max, затем для уменьшения влияния рассогласований в системе обработки приводят измеренную амплитуду Ai max к ее значению в тестовых условиях с учетом свойства (постоянства объема) функции неопределенности сигнала РСА. согласно выражению
отражателей на РЛИ определяют по максимальным амплитудам огибающих изображений УО, восстановленных путем двумерной интерполяции квадратных наборов цифровых отсчетов (пикселей) в окрестности каждого отражателя размером nх×nу с использованием алгоритма интерполяции на основе двумерного преобразования Фурье, модифицированного с целью уменьшения погрешности интерполяции. Для этого измеряют максимальную амплитуду интерполированной огибающей РЛИ Аi max, затем для уменьшения влияния рассогласований в системе обработки приводят измеренную амплитуду Ai max к ее значению в тестовых условиях с учетом свойства (постоянства объема) функции неопределенности сигнала РСА. согласно выражению
 согласно уравнению
согласно уравнению
 – амплитуда интерполированной огибающей i-го УО в измерительном РЛИ;
– амплитуда интерполированной огибающей i-го УО в измерительном РЛИ;
 – среднее значение амплитуды пикселя измерительного РЛИ, измеренное по полю квадратного фрагмента размером nф×nф пикселей, выбранного в пределах однородного участка текстуры пространственно-распределенного объекта,
– среднее значение амплитуды пикселя измерительного РЛИ, измеренное по полю квадратного фрагмента размером nф×nф пикселей, выбранного в пределах однородного участка текстуры пространственно-распределенного объекта, из ЭПР измеряемых объектов вида
из ЭПР измеряемых объектов вида
 , степень n которых выбирают из условия реализации погрешности аппроксимации не более 0.5 дБ (фиг.4) и расчета эталонных значений ЭПР каждого i-го отражателя в каждом сеансе калибровки в соответствии с формулой
, степень n которых выбирают из условия реализации погрешности аппроксимации не более 0.5 дБ (фиг.4) и расчета эталонных значений ЭПР каждого i-го отражателя в каждом сеансе калибровки в соответствии с формулой
 (
(
 отражателей на РЛИ определяют по максимальным амплитудам огибающих исходных изображений УО, восстановленных путем двумерной интерполяции квадратных наборов цифровых отсчетов (пикселей) в окрестности каждого отражателя размером nx×ny с использованием алгоритма интерполяции на основе двумерного преобразования Фурье, модифицированного с целью уменьшения погрешности интерполяции, затем для уменьшения влияния рассогласований системы обработки РСА измеренную амплитуду интерполированной огибающей РЛИ Ai max приводят к ее значению в тестовых условиях с учетом свойства (постоянства объема) функции неопределенности сигнала РСА согласно выражению
отражателей на РЛИ определяют по максимальным амплитудам огибающих исходных изображений УО, восстановленных путем двумерной интерполяции квадратных наборов цифровых отсчетов (пикселей) в окрестности каждого отражателя размером nx×ny с использованием алгоритма интерполяции на основе двумерного преобразования Фурье, модифицированного с целью уменьшения погрешности интерполяции, затем для уменьшения влияния рассогласований системы обработки РСА измеренную амплитуду интерполированной огибающей РЛИ Ai max приводят к ее значению в тестовых условиях с учетом свойства (постоянства объема) функции неопределенности сигнала РСА согласно выражению
 согласно уравнению
согласно уравнению 
 – амплитуда интерполированной огибающей i-го УО в измерительном РЛИ;
– амплитуда интерполированной огибающей i-го УО в измерительном РЛИ; – отношение коэффициентов усиления сквозного тракта РСА по амплитуде в режимах измерений и калибровки,
– отношение коэффициентов усиления сквозного тракта РСА по амплитуде в режимах измерений и калибровки,
 – среднее значение амплитуды пикселя измерительного РЛИ, измеренное по полю квадратного фрагмента размером nф·nф пикселей, выбранного в пределах однородного участка текстуры пространственно-распределенного объекта,
– среднее значение амплитуды пикселя измерительного РЛИ, измеренное по полю квадратного фрагмента размером nф·nф пикселей, выбранного в пределах однородного участка текстуры пространственно-распределенного объекта,