Патент на изобретение №2306107
|
||||||||||||||||||||||||||
(54) ХИРУРГИЧЕСКИЙ СТЕПЛЕР ДЛЯ НАЛОЖЕНИЯ П-ОБРАЗНОЙ СКОБКИ
(57) Реферат:
Изобретение относится к медицине, хирургии и может быть использовано для соединения тканей внутри брюшной полости, фиксации сетчатого протеза при лапароскопической пластике грыжи и открытом грыжесечении, соединения краев кожных ран. Хирургический степлер для наложения П-образной скобки содержит ручку с возвратной пружиной и рабочую часть. Рабочая часть выполнена в виде удлиненной трубки с расположенным на дистальном конце механизмом формообразования скобки. Механизм формообразования включает матрицу и приспособление для удержания скобки, с внешней стороны которой соосно с ней расположен подвижный защитный экран. Тяга соосно расположена внутри рабочей части. Матрица выполнена в виде втулки с внешним диаметром не менее длины спинки скобки и содержит четыре сквозных скобочных паза. Пазы расположены в одной продольной плоскости. Плоскость проходит через осевую линию удлиненной трубки и рычаги ручки. Два первых скобочных паза глубиной не менее толщины спинки скобки расположены диаметрально на конце втулки и симметрично осевой линии. Два других скобочных паза расположены на внутренней поверхности отверстия втулки и параллельны осевой линии. Приспособление для удержания скобки представляет собой цангу, которая закреплена на конце подвижной тяги и расположена внутри втулки соосно, и состоит из двух упругих лапок с двумя сквозными скобочными пазами. Пазы расположены на смежных внутренних поверхностях симметрично относительно продольной плоскости и ортогонально продольной осевой линии. Корпус втулки содержит две скошенные поверхности. Скошенные поверхности расположены симметрично и под углом относительно продольной плоскости. Технический результат изобретения состоит в создании многоразового, односкобочного хирургического степлера с упрощенной конструкцией его рабочей части и механизмом формообразования скобки, обеспечивающего повышение надежности фиксации скобки в плотных тканях и позволяющего фиксировать скобку в случае ориентации дистального конца рабочей части под углом к поверхности биологической ткани, отличным от ортогонального, более удобного и эффективного для очистки поверхностей деталей, расположенных внутри рабочей части, при санитарной обработке. 2 з.п. ф-лы, 18 ил.
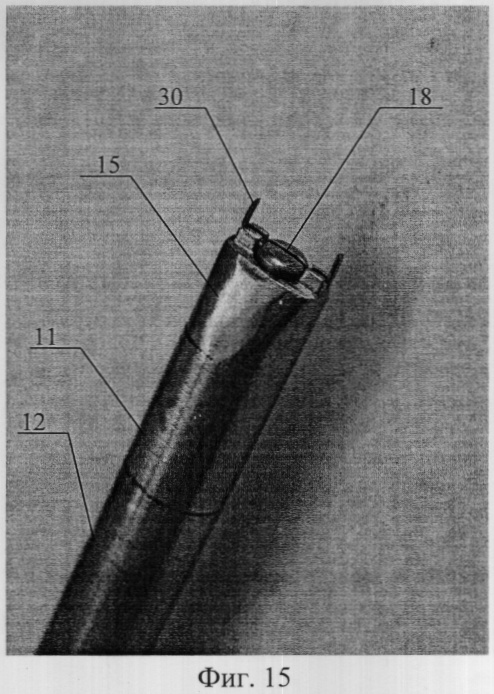
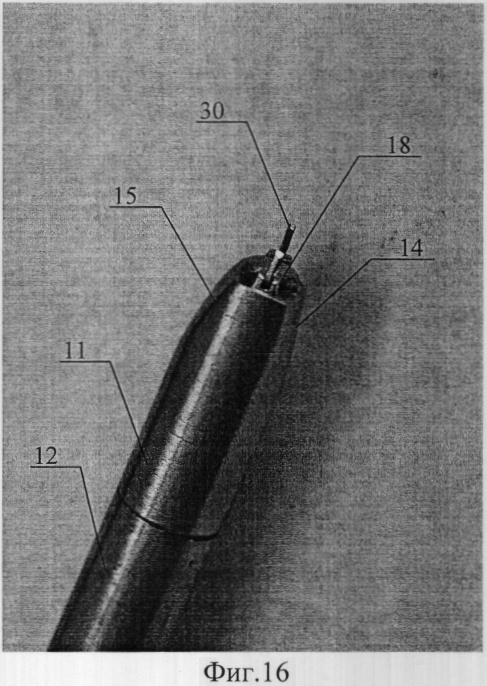
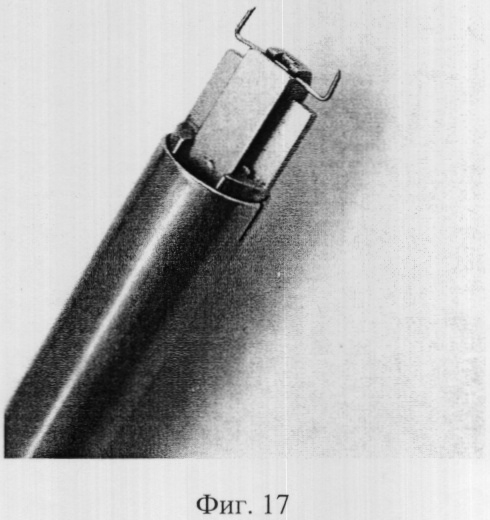
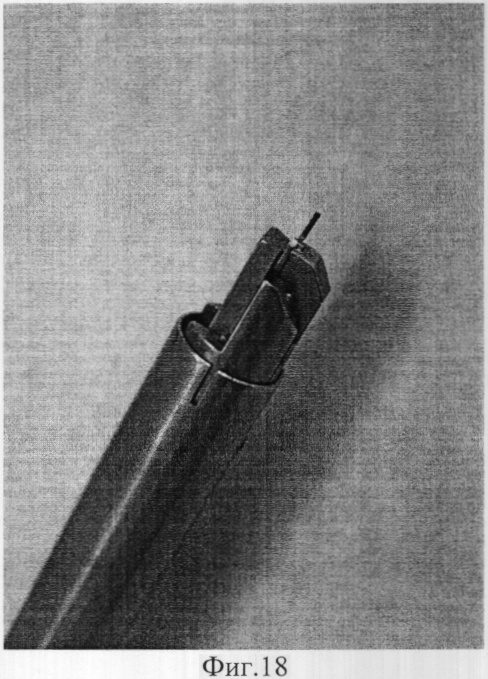
Изобретение относится к медицине, хирургии и может быть использовано для соединения тканей внутри брюшной полости, фиксации сетчатого протеза при лапароскопической пластике грыжи и открытом грыжесечении, соединения краев кожных ран. В медицинской технике инструменты для соединения тканей с помощью П-образных скобок представлены достаточно широко, а в силу своих конструктивных особенностей и по функциональному назначению делятся на инструменты многоразового и одноразового применения, многозарядные и однозарядные, используемые при эндоскопических и открытых операциях. Известен хирургический эндоскопический сшивающий аппарат [1], содержащий ручку, скобочный корпус и механизм формообразования скобки, состоящий из матрицы, наковальни с центральным выступом и ползунковым скобочным толкателем. Известен хирургический аппарат для герниопластики “MULTIFIRE ENDOGERNIA” [2]. Аппарат содержит ручку, скобочный корпус, механизм формообразования скобки, включающий матрицу, наковальню, ползунковый скобочный толкатель, и комплектуется одноразовым магазином скобок. Известны аппараты однократного применения [3, 4] для наложения скобок на кожу и апоневроз типа Proximate фирмы Ethicon и Premium фирмы USSE. Причем у всех вышеперечисленных степлеров общим является принцип работы механизма формообразования скобки. Однако известные хирургические степлеры, однозарядные, многоразового применения, используемые при эндоскопических операциях, имеют ряд недостатков, относящихся к принципу работы механизма формообразования скобки: технологические сложности при зарядке степлера скобкой из картриджа; недостаточная надежность удержания скобки во время постановки и, как следствие, низкая надежность фиксации скобки в плотных тканях; невозможность фиксации скобки в случае ориентации дистальной части степлера под отличным от ортогонального углом к тканям, что при ограниченных размерах операционного поля не обеспечивает постановку скобки в удаленных и труднодоступных местах; сложности, возникающие при очистке поверхностей деталей, расположенных внутри рабочей части, при санитарной обработке. Наиболее близким к заявляемому изобретению по технической сущности является хирургический аппарат – герниостеплер «Соло-11» [5]. Известный аппарат предназначен для фиксации сетчатого протеза путем наложения П-образной скобки при лапароскопической пластике грыжи, для сшивания внутренних органов. Аппарат содержит ручку типа «пистолет» с расположенной в ней возвратной пружиной и рабочую часть, состоящую из рабочего корпуса с размещенным внутри скобочным ползунковым толкателем, спиралевидной пружиной сжатия механизма удержания скобки на период тракции. На дистальном конце рабочей части расположен механизм формообразования скобки, содержащий упорную губку, матрицу и приспособление для удержания скобки. Также рабочая часть закрыта соосно с ней расположенным подвижным защитным экраном, выполненным в виде трубки, предназначенным для защиты скобки от случайных прикосновений в процессе тракции к тканям. Также устройство снабжено механизмом вращения рабочей части на 360°. Аппарат требует зарядки скобкой каждый раз, непосредственно перед ее постановкой. Однако в известном устройстве не предусмотрено использование дополнительных средств, предусматривающих снижение уровня брака при зарядке скобки из картриджа, достаточно надежного удержания скобки во время постановки и, тем самым, повышающих надежность фиксации скобки в плотных тканях, которые обеспечили бы постановку скобки в случае ориентации дистальной части аппарата под углом, отличным от ортогонального, по отношению к тканям, увеличивающих эффективность очистки поверхностей деталей, расположенных внутри рабочей части, при санитарной обработке. Технический результат, на достижение которого направлено заявляемое изобретение, состоит в создании многоразового, односкобочного хирургического степлера с упрощенной конструкцией его рабочей части и механизмом формообразования скобки, обеспечивающего повышение надежности фиксации скобки в плотных тканях и позволяющего фиксировать скобку в случае ориентации дистального конца рабочей части под углом к поверхности биологической ткани, отличным от ортогонального, более удобного и эффективного для очистки поверхностей деталей, расположенных внутри рабочей части, при санитарной обработке. Для достижения указанного технического результата в хирургическом степлере для наложения П-образной скобки, содержащем ручку с расположенной в ней возвратной пружиной и рабочую часть, выполненную в виде удлиненной трубки, с расположенным на дистальном конце механизмом формообразования скобки, включающим матрицу и приспособление для удержания скобки, с внешней стороны которой соосно с ней расположен подвижный защитный экран и тяга соосно расположена внутри рабочей части, согласно изобретению матрица выполнена в виде втулки с внешним диаметром не менее длины спинки скобки и содержит четыре сквозных скобочных паза, расположенных в одной продольной плоскости, проходящей через осевую линию удлиненной трубки и рычаги ручки, причем два первых скобочных паза глубиной не менее толщины спинки скобки расположены диаметрально на конце втулки и симметрично осевой линии, два других скобочных паза расположены на внутренней поверхности отверстия втулки и параллельны осевой линии, а приспособление для удержания скобки представляет собой цангу, закрепленную на конце подвижной тяги и расположенную внутри втулки соосно, и состоящую из двух упругих лапок с выполненными на них двумя сквозными скобочными пазами, расположенными на смежных внутренних поверхностях симметрично относительно продольной плоскости и ортогонально продольной осевой линии. Также корпус втулки содержит две скошенные поверхности, расположенные симметрично и под углом относительно продольной плоскости. Также тяга, корпус рабочей части связаны между собой и основанием ручки разъемным шлицевым соединением. Также ручка выполнена аксиальной. Новым является то, что матрица механизма формообразования скобки выполнена в виде втулки с внешним диаметром не менее длины спинки скобки и содержит четыре сквозных скобочных паза, расположенных в одной продольной плоскости, проходящей через осевую линию удлиненной трубки и рычаги ручки, причем два первых скобочных паза глубиной не менее толщины спинки скобки расположены диаметрально на конце втулки и симметрично осевой линии, два других скобочных паза расположены на внутренней поверхности отверстия втулки и параллельно осевой линии, а приспособление для удержания скобки представляет собой цангу, закрепленную на конце подвижной тяги и расположенную внутри втулки соосно, и состоящую из двух упругих лапок с выполненными на них двумя сквозными скобочными пазами, расположенными на смежных внутренних поверхностях симметрично относительно продольной плоскости и ортогонально продольной осевой линии. Также корпус втулки содержит две скошенные поверхности, расположенные симметрично и под углом относительно продольной плоскости. Также тяга, корпус рабочей части связаны между собой и основанием ручки разъемным шлицевым соединением, а ручка выполнена аксиальной. Выполнение механизма формообразования в виде втулки с двумя сквозными скобочными пазами глубиной не менее толщины спинки скобки, расположенной на дистальном конце рабочей части, и цанги, состоящей из двух упругих лапок с выполненными на них двумя сквозными скобочными пазами согласно заявленному изобретению, увеличивает надежность фиксации скобки в плотных тканях и упрощает процесс зарядки скобки из картриджа. Применение втулки с двумя скошенными поверхностями, расположенными симметрично и под углом относительно продольной плоскости, решает проблему фиксации скобки в случае ориентации дистальной части под углом к тканям, отличным от ортогонального. Реализация степлера с упрощенной конструкцией механизма формообразования скобки, имеющей всего две детали: матрицу в виде втулки и приспособление для удержания скобки, выполненное в виде цанги, увеличивает доступность и эффективность очистки поверхностей деталей, расположенных внутри рабочей части, при санитарной обработке. Также существенным является то, что тяга, корпус рабочей части связаны между собой и основанием ручки разъемным шлицевым соединением, обеспечивающим однозначное взаимное расположение, что позволяет упростить процедуру разборки и сборки степлера при санитарной обработке. Возможно применение ручки аксиальной конструкции (6,7). Изобретение поясняется фигурами графических изображений и фотографиями основных узлов аппарата. На фиг.1 представлен общий вид степлера в плане (защитный экран снят). На фиг.2 представлен общий вид степлера сбоку. На фиг.3 показан общий вид рабочей части в сборе. На фиг.4 изображен общий вид тяги в плане. На фиг.5 представлен общий вид корпуса рабочей части в плане. На фиг.6 показан общий вид защитного экрана. На фиг.7 представлено сечение матрицы, вид сбоку, изображенное на фиг.3. На фиг.8 представлено сечение матрицы, вид А-А. На фиг.9 показан общий вид цанги, вид сбоку, представленный на фиг.4. На фиг.10 представлено сечение цанги, вид Б-Б. На фиг.11 представлен начальный этап формообразования скобки. На фиг.12 представлен промежуточный этап формообразования скобки. На фиг.13 представлен конечный этап формообразования скобки. На фиг.14 показано положение степлера в случае ориентации дистальной части под углом, отличным от ортогонального. На фиг.15 представлена фотография общего вида механизма формообразования предлагаемого хирургического степлера с заряженной П-образной скобкой, вид сверху. На фиг.16 представлена фотография механизма формообразования предлагаемого хирургического степлера с заряженной П-образной скобкой, вид сбоку. На фиг.17 представлена фотография механизма формообразования хирургического степлера-прототипа (Соло-11 мм) с заряженной П-образной скобкой, вид сверху. На фиг.18 представлена фотография механизма формообразования хирургического степлера-прототипа (Соло-11 мм) с заряженной П-образной скобкой, вид сбоку. Хирургический степлер для наложения П-образной скобки (фиг.1) содержит ручку 1, рабочую часть 10 с защитным экраном 21 (фиг.2). В дистальной части ручки 1 расположен узел присоединения рабочей части 10 при помощи накидной гайки 9. В проксимальной части ручки 1 расположены два рычага 4 и 5, плоская возвратная пружина 6, подвижный узел 2 для присоединения проксимального конца 16 (фиг.3) тяги 13 посредством гайки 3, кнопка 8 устройства фиксации 7 положения тяги 13 в процессе тракции скобки 30 (фиг.13). Рабочая часть 10 содержит рабочий корпус 12 в виде удлиненной трубки, на дистальном конце которой расположена матрица 11, выполненная в виде втулки диаметром не менее длины спинки скобки 30 и с двумя скошенными поверхностями 14 и 15, расположенными симметрично и под углом относительно продольной плоскости, включающей плоскость, в которой находятся рычаги ручки 1, осевую линию рабочей части 10; также матрица снабжена двумя диаметрально ориентированными скобочными пазами 22 и 23 глубиной не менее толщины спинки скобки 30, выполненными на поверхности основания дистальной части матрицы, два других скобочных паза 24 и 25 параллельны осевой линии рабочей части 10 на поверхности отверстия втулки. Тяга 13 выполнена в виде стержня, соосно расположенного с рабочей частью 10, дистальный конец которого представляет собой цангу 18, состоящую из двух упругих лапок 26 и 27 с двумя выполненными симметрично относительно продольной плоскости и расположенными ортогонально осевой линии скобочными пазами 28 и 29 (фиг.9) на смежных внутренних поверхностях лапок. Хирургический степлер для наложения скобки работает следующим образом. Рабочий цикл аппарата состоит из 6 этапов: сборки, зарядки скобкой, тракции, наложения скобки, противотракции, разборки для последующей санитарной обработки, дезинфекции, стерилизации. Сборка аппарата состоит из сборки рабочей части 10 и присоединения ее к ручке 1 при помощи накидных гаек 3 и 9. Элементы конструкции 17, 19 и 20 за счет шлицевого соединения обеспечивают однозначное соответствие положения скобочных пазов (22 и 23, 24 и 25, 28 и 29) механизма формообразования скобки и плоскости расположения рычагов ручки 1. Все движения, необходимые для приведения в действия хирургического степлера, производятся одной рукой. На этапе зарядки скобки в хирургический степлер приводят в исходное положение узел фиксации 7 и тяги 13 нажатием кнопки 8 на рычаге ручки 1. Открывают механизм формообразования скобки, состоящий из матрицы 11 и цанги 18, продвижением защитного экрана 21 в сторону ручки 1 до упора. Опускают дистальный конец рабочей части 10 в картридж со скобками и производят зарядку одной скобки нажатием рычагов 4, 5 ручки до появления характерного щелчка в узле фиксации 7. Степлер заряжен скобкой. На этапе тракции надвигают защитный экран 21 на дистальный конец рабочей части 10 и производят тракцию скобки к месту ее наложения. Этап наложения скобки в ткань соответствует процессу формообразования скобки. В связи с этим в начале открывают механизм формообразования скобки, состоящий из матрицы 11 и цанги 18, продвижением защитного экрана 21 в сторону ручки 1 до упора, а затем проводят дальнейшее сжатие рычагов 4, 5 до упора и последующее освобождение их. В результате сжатия рычагов 4, 5 подвижная часть 2 приобретает соответствующее перемещение, что в свою очередь вызывает продвижение дистального конца цанги 18, удерживающей центральную часть спинки скобки, вовнутрь матрицы 11, совершая таким образом процесс формообразования скобки. При последующем освобождении рычагов 4, 5, благодаря действию возвратной пружины 6, сами рычаги и узел фиксации 7 с кнопкой 8 стремятся принять первоначальное положение, а подвижная часть 2 приобретает соответствующее перемещение в обратном направлении, что в свою очередь вызывает выдвижение цанги 18 из отверстия матрицы 11 с одновременным выталкиванием и последующим освобождением из пазов 28, 29 цанги 18 уже сформированной скобки 30. Этап противотракции связан с удалением хирургического степлера из зоны наложения скобки для последующей зарядки следующей скобки или разборки степлера для санитарной обработки. Последний этап рабочего цикла состоит из разборки хирургического степлера на составные части для проведения санитарной обработки. Конструкция хирургического степлера, согласно заявленному изобретению, благодаря более эффективному воздействию химических реагентов на простую геометрию составных частей обеспечивает более качественное проведение санитарной обработки изделия в целом. Для разборки степлера на составные части отвинчивают накидные гайки 9, 3 для отделения рабочей части 10 от ручки 1 и дальнейшего разделения рабочей части 10 на собственно корпус 12, тягу 13 и защитный экран 21 и производят обработку. Заявляемое устройство апробировано в эксперименте и клинике. Результаты испытаний позволили сделать следующий вывод – предлагаемое устройство обеспечивает повышение надежности фиксации скобки в плотных тканях и позволяет фиксировать скобку в случае ориентации дистального конца рабочей части под углом к поверхности биологической ткани, отличным от ортогонального, позволяет повысить удобство и эффективность очистки поверхностей деталей, расположенных внутри рабочей части, при санитарной обработке. Источники информации 1. Мамаев Г.В., Попов В.О. Хирургический эндоскопический сшивающий аппарат. Пат. №2119773 RU, МПК А61В 17/10, опубл. 10.10.1998. 2. Аппараты для герниопластики – перезаряжаемые аппараты при лапароскопической пластике грыжи для фиксации титановыми П-образными скобками полипропиленовой сетки. Аппарат MULTIFIRE ENDOGERNIA. Проспект фирмы AUTO SUTURE корпорации TYCO (www.autosuture.com). 3. Егиев В.Н. Волшебный мир сшивающих аппаратов. Москва. «Центръ», 1995. 4. Федоров И.В. Хирургические инструменты. Функции и назначение. АКП «Аделаида». Казань, 2001. 5. Сшиватель органов лапароскопический односкобочный «Соло-11». Проспект производственной фирмы «Аксиома», Санкт-Петербург, 2000. 6. Каталог продукции 2005 научно-производственной фирмы “МФС”. Казань, а/я 43. 7. Каталог оборудования инструментов. Минимально инвазивная хирургия. ГУММИ Руссланд Эндохирургия, Нижний Новгород.
Формула изобретения
1. Хирургический степлер для наложения П-образной скобки, содержащий ручку с расположенной в ней возвратной пружиной и рабочую часть, выполненную в виде удлиненной трубки с расположенным на дистальном конце механизмом формообразования скобки, включающем матрицу и приспособление для удержания скобки, с внешней стороны которой соосно с ней расположен подвижный защитный экран, и тяга соосно расположена внутри рабочей части, отличающийся тем, что матрица выполнена в виде втулки с внешним диаметром не менее длины спинки скобки и содержит четыре сквозных скобочных паза, расположенных в одной продольной плоскости, проходящей через осевую линию удлиненной трубки, и рычаги ручки, причем два первых скобочных паза глубиной не менее толщины спинки скобки расположены диаметрально на конце втулки и симметрично осевой линии, два других скобочных паза расположены на внутренней поверхности отверстия втулки и параллельны осевой линии, а приспособление для удержания скобки представляет собой цангу, закрепленную на конце подвижной тяги и расположенную внутри втулки соосно, и состоящую из двух упругих лапок с выполненными на них двумя сквозными скобочными пазами, расположенными на смежных внутренних поверхностях симметрично относительно продольной плоскости и ортогонально продольной осевой линии, а также корпус втулки содержит две скошенные поверхности, расположенные симметрично и под углом относительно продольной плоскости. 2. Хирургический степлер по п.1, отличающийся тем, что тяга, корпус рабочей части связаны между собой и основанием ручки разъемным шлицевым соединением. 3. Хирургический степлер по п.1, отличающийся тем, что ручка выполнена аксиальной.
РИСУНКИ
|
||||||||||||||||||||||||||