Патент на изобретение №2303708
|
||||||||||||||||||||||||||
(54) СПОСОБ И УСТРОЙСТВО ВОЛНОВАЯ ТУРБИНА “УСТЮГ”
(57) Реферат:
Способ и устройство турбина “Устюг” предназначены для преобразования энергии морских волн в механическую энергию вращения турбины. Турбина (Т) размещается в глубоких спокойных слоях воды, а поплавок (П), удерживающий вал вращения Т, но не участвующий в его вращении, находится на поверхности воды, участвуя в ее волновом движении. Посредством жесткой продольной связи с Т через вал вращения смещения П передаются затопленной Т, что приводит ее во вращательное движение. В силу гибкости лопастей (Л) движение Т всегда осуществляется в одну сторону, причем в состоянии покоя хорды Л располагаются в плоскости вращения Т, а в активном состоянии Л изгибаются, как крыло птицы или хвост рыбы при маховом поперечном к направлению движения ударе. Захват Л и силовое воздействие от П к Л осуществляется в соответствии с правилом U=0.29 в поперечном к плоскости движения Л направлении. Л расположены попарно симметрично относительно вала вращения на поперечине так, что образуют отдельный элемент Т с знакоодинаковыми для обеих Л порождаемых ими моментов вращения. Количество n таких элементов, расположенных вдоль вала вращения Т, определяет мощность Т, возрастающую пропорционально числу элементов Т, взаимное расположение которых по углу в плоскости вращения и расстоянию между элементами на валу вращения определяется из условия максимальной эффективности работы элементов. Предлагаемое изобретение позволяет повысить эффективность преобразования энергии волн и надежность работы. 2 н.п. ф-лы, 1 табл., 12 ил.
Изобретение относится к средствам преобразования возвратно-поступательного движения текучих сред, вызванного, например, морскими волнами, в одностороннее вращательное движение турбины. Уровень техники Известно устройство ветряная мельница или ветряк (Б.Экк. Введение в техническую гидромеханику. М. – Л.: 1941, Госэнергоиздат, – 256 с.). В ней на валу вращения в плоскости, перпендикулярной к оси вала вращения, закреплено несколько лопастей, которые под действием ветра приходят в движение, задавая при этом вращательное движение вала вращения. К недостаткам известного устройства относятся: – низкий коэффициент полезного действия (КПД): предельный теоретический КПД меньше 60%, реальный – в пределах 15-25%; – однонаправленность ветряка по отношению к направлению ветра, задающая необходимое направление вращения вала. К недостаткам известного устройства относятся: – потеря эффективности устройства из-за энергетических потерь, сопровождающих процесс прохождения текучими потоками системы клапанов и колен, изменяющих направления потоков; – сохраняется неэффективный принцип работы ветряка; Известна турбина Уэллса (Твайделл Дж., Уэйр А. Возобновляемые источники энергии: Пер. с англ. – М.: Энергоатомиздат. 1990. – 392 с.), у которой знакопостоянный вращательный момент возникает независимо от прямого или обратного направления потока текучей среды. Это достигается за счет формы лопастей турбины, обладающих аэродинамическим профилем в виде капли, вытянутой в направлении движения лопасти в плоскости вращения турбины. При падении потока на лопасть под углом к ее поверхности, отличающимся от прямого угла, возникает составляющая силы, воздействующей на лопасть, выталкивающая ее из потока в направлении, перпендикулярном оси вращения турбины. В результате турбина приобретает вращательное движение, поддерживаемое совокупным воздействием всех лопастей, имеющихся у турбины. В силу симметрии профиля лопасти по отношению к плоскости вращения турбины воздействие прямого потока аналогично воздействию обратного потока, в результате чего турбина в обоих случаях имеет одно и то же направление вращения. К недостаткам турбины Уэллса относятся: – низкий коэффициент полезного действия (КПД). В связи с тем, что турбина Уэллса – это фактически ветряк, хоть и двухсторонний, его (КПД) в идеальном варианте может оцениваться как меньше 60%, а в реальном от 15 до 25%; – избирательность в эффективности взаимодействия лопасти и потока из-за фиксированности профиля лопасти, что при нестабильности волнового спектра приводит, как следствие, к существенной потере общей эффективности турбины; – из-за фиксированности профиля лопасти исключен ресурс возможного повышения эффективности работы турбины за счет снижения сопротивления; – фиксированность аэродинамического профиля лопасти и механистический подход к возникновению движущей силы лопасти за счет отражения потока от наклонной плоскости представляют собой суррогат двух разделов физики – динамики твердого тела и аэродинамики обтекаемого профиля, что приводит к низкоэффективному варианту турбины; – принцип работы турбины задает такую геометрию проходящих через нее потоков, что приводит к необходимости дополнительных затрат на строительство сооружений, задающих рабочие потоки и снижающих эффективность всего сооружения; – геометрия расположения рабочих потоков и турбины исключает наращивание мощности на валу турбины путем каскадного расположения на нем группы последовательно расположенных турбин; – турбулентность внешней атмосферы в штормовой период существенно влияет на эффективность работы турбины Уэллса. К недостаткам известного средства относятся: – тот же низкоэффективный принцип действия ветряка, т.е., по сути, гребковый способ создания силы тяги лопастями; – жесткие лопасти снижают эффективность работы устройства; – введение в устройство системы управления лопастями, усложняющей устройство, неизбежно приводит к снижению надежности работы турбины. Наиболее близким к предлагаемому техническому решению является наш «Способ и устройство для перемещения затопленного тела» (патент №2259302 RU), в котором к плоскому или объемному гидродинамически обтекаемому гибкому упругому телу, находящемуся в текучей среде, в поперечном к поверхности профиля направлении в определенной области, удовлетворяющей правилу U=0.29, прикладывается сила. Это приводит к возникновению у тела силы тяги в направлении вперед, поперечном к направлению прикладываемой силы. Известное решение допускает расширение в виде применимости его для случая, когда сила, воздействующая на вышеуказанное тело, создается за счет энергии, например, морских волн. Цель предлагаемого решения – разработка способа и устройства-турбины, вращательное движение которой возникает под воздействием текучей среды при возвратно-поступательном движении турбины относительно среды или среды относительно турбины вдоль оси ее вращения, лишенного вышеперечисленных недостатков известных технических решений и являющегося естественным развитием нашего известного технического решения. Цель достигается применением в качестве лопасти турбины плоского или объемного гидродинамически обтекаемого гибкого упругого тела, область жесткого захвата которого удовлетворяет правилу U=0.29, причем в состоянии покоя хорда лопасти располагается в плоскости вращения турбины, перпендикулярной оси вращения турбины, а сама турбина состоит из n отдельных элементов, закрепленных на валу вращения турбины, каждый из которых составлен из двух и более лопастей, симметрично расположенных относительно вала вращения турбины, при этом сила тяги лопасти возникает под воздействием текучей среды при возвратно-поступательном движении турбины относительно среды или среды относительно турбины вдоль оси ее вращения за счет гибких деформаций лопасти, подобных деформациям крыла птицы или хвоста рыбы в процессе махового движения, и возникновения вихревого движения среды в поперечном относительно направления махового движения направлении. СУЩНОСТЬ ИЗОБРЕТЕНИЯ. А. При разработке «Способа и устройства для перемещения затопленного тела» (патент №2259302 RU) нами получено, что при воздействии в поперечном направлении на плоское или объемное гидродинамически обтекаемое гибкое упругое тело типа крыла, находящееся в текучей среде, в определенной его области приводит к возникновению силы тяги, вынуждающей тело двигаться вперед в поперечном к воздействующей силе направлении. Поясним это. Прежде всего, особого внимания требует вопрос определения области приложения внешнего усилия к движителю. Рассмотрим (фиг.1) тело, находящееся под действием внешней силы. Для определенности пусть это будет плоская пластина прямоугольной формы с размерами l×k, где l – поперечный, a k – продольный ее размеры, причем l Существует две крайние ситуации: первая – это когда тяга захватывает пластину в точке, соответствующей максимальному миделевому сечению, т.е. в точке С, где смещение СО’= Эффективность действия внешней силы будем оценивать по максимуму возникающей силы тяги в зависимости от параметра Оценим то расстояние На фиг.2, а приведены: XOY – исходная прямоугольная система координат, точка О – точка выбора тяги, например, троса; X”О”Y” – система координат, связанная с мгновенной осью вращения, проходящей через начало координат О”. Пусть положение тела в пространстве будет характеризоваться какой-либо точкой этого тела, например, как в нашем случае, точкой его захвата. Тогда введение системы координат X”О”Y” связано с тем, что при криволинейном движении тела имеется ось, которая в рассматриваемый момент движения находится в покое, т.е. тело в этот момент как бы совершает вращательное движение вокруг этой оси, проходящей через точку О”. Такая ось может, как в нашем случае, находиться за пределами тела. А результирующая криволинейная траектория движения тела будет представлять собой множество точек, последовательно образованных совокупностью положений в пространстве точки захвата.
F – вектор прикладываемой тяговой силы троса (здесь и далее жирными буквами будут обозначаться векторные величины); N – вектор силы реакции среды. На фиг.2, б приведены: АВ=l – ширина пластины; l1 – плечо силы f1; f1 – вектор силы, задающей вращение пластины вокруг точки О’, связанной с захватом пластины тросом; С – центр масс пластины и одновременно ее геометрический центр; O’С= Fn=F·Cos F F’=Fn+F
Момент M1 (нежирными буквами в дальнейшем обозначаются модули соответствующих векторов) силы F
(Н.И.Карякин, К.Н.Быстров, П.С.Киреев. Краткий справочник по физике. “Высшая школа”. М., 1962). Другой момент М2 силы f1, действующей на пластину с плечом l1, причем в этом случае момент инерции – JO’ и угловое ускорение – d2
Рассмотрим случай равенства углов Случай Тогда имеет место равенство
Поскольку
(m – эффективная равномерно распределенная масса пластины, включающая присоединенную массу [Л.Д.Ландау, Е.М.Лифшиц. Гидродинамика. “Наука”. 1988]),
то из равенства (3) с учетом (4), (5) и (6) вытекает
Обозначив всю совокупность сомножителей, не зависящих от
перепишем равенство (7) в виде
Тогда первая производная F
Равенство нулю первой производной F
А поскольку вторая производная F
то полученное значение величины Если же учесть, что сила тяги F
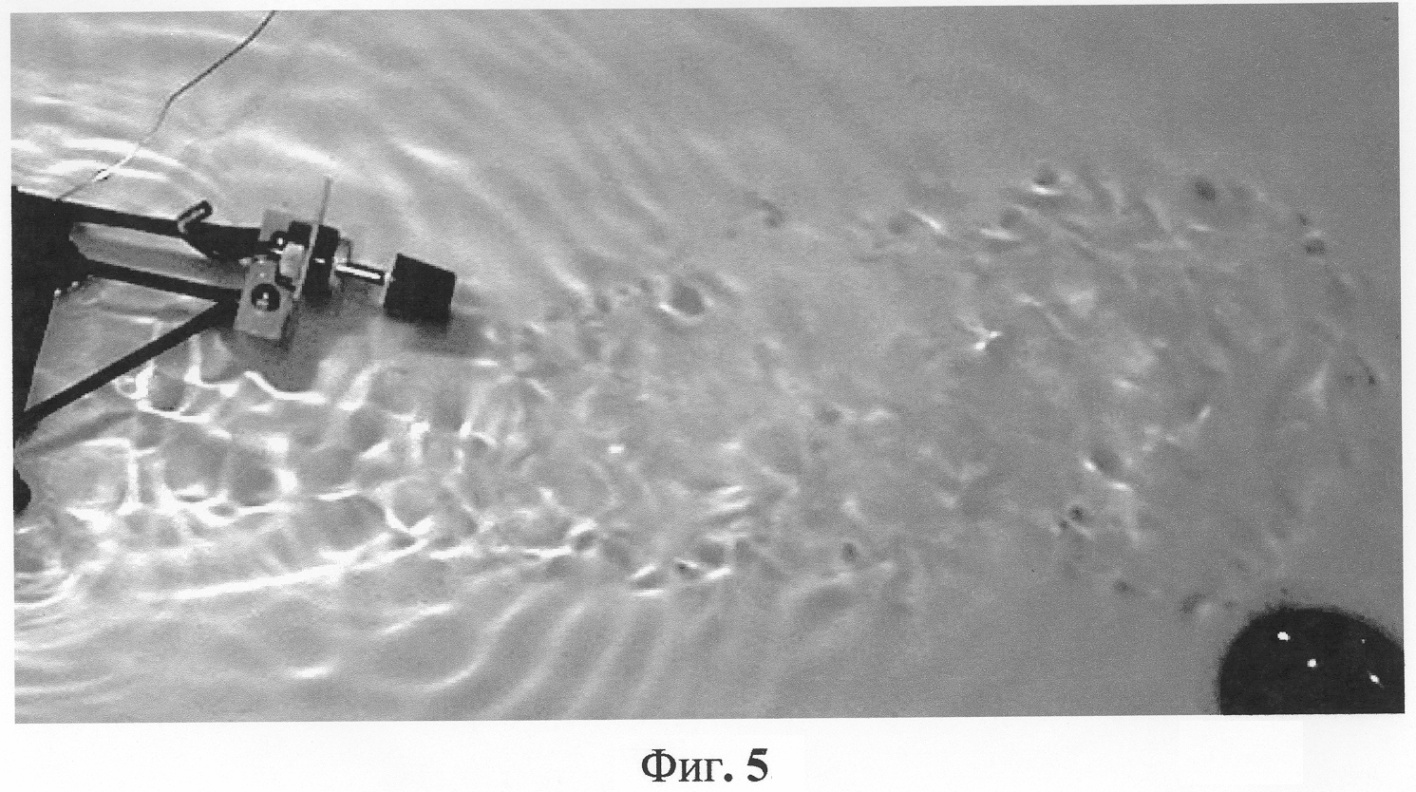
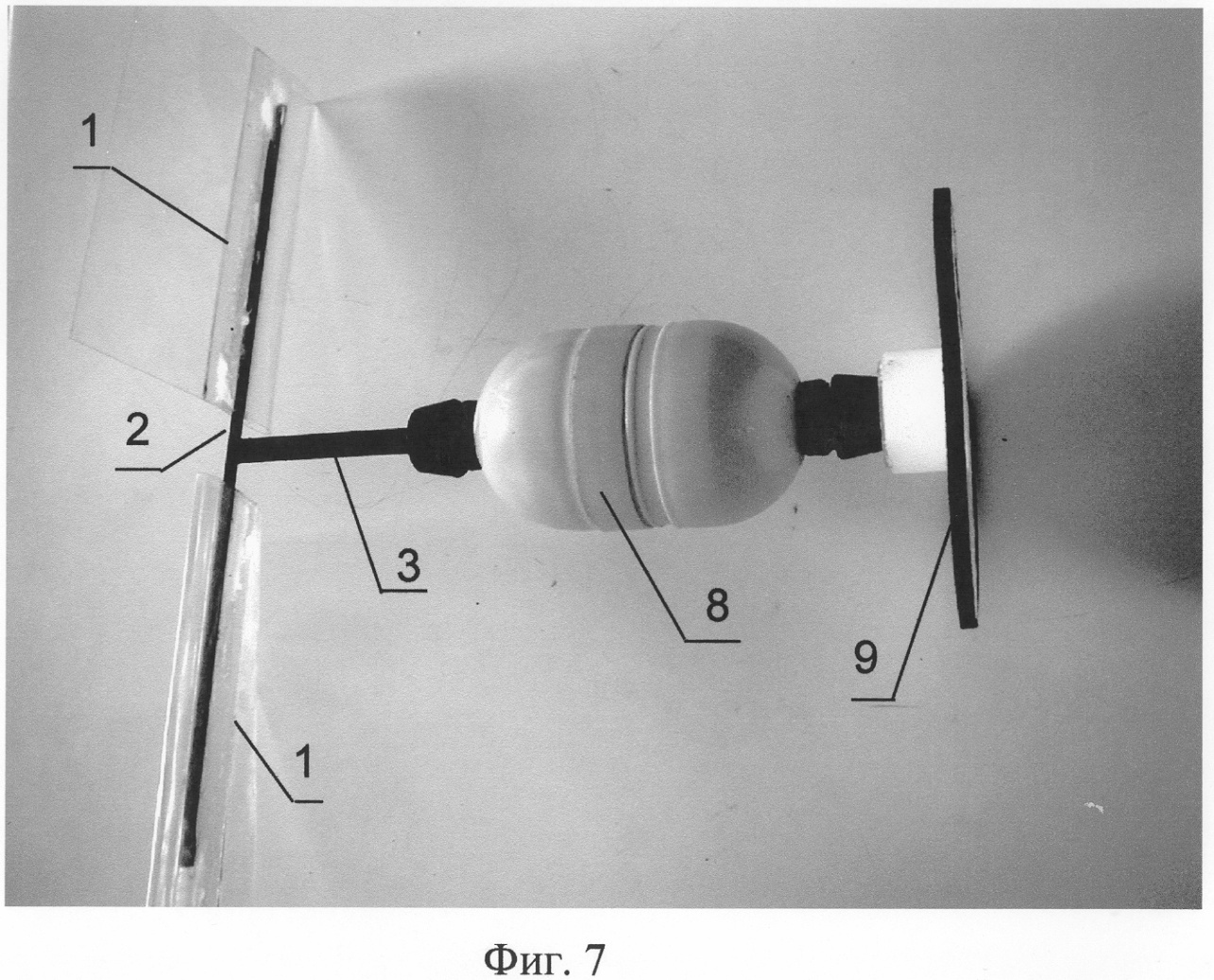
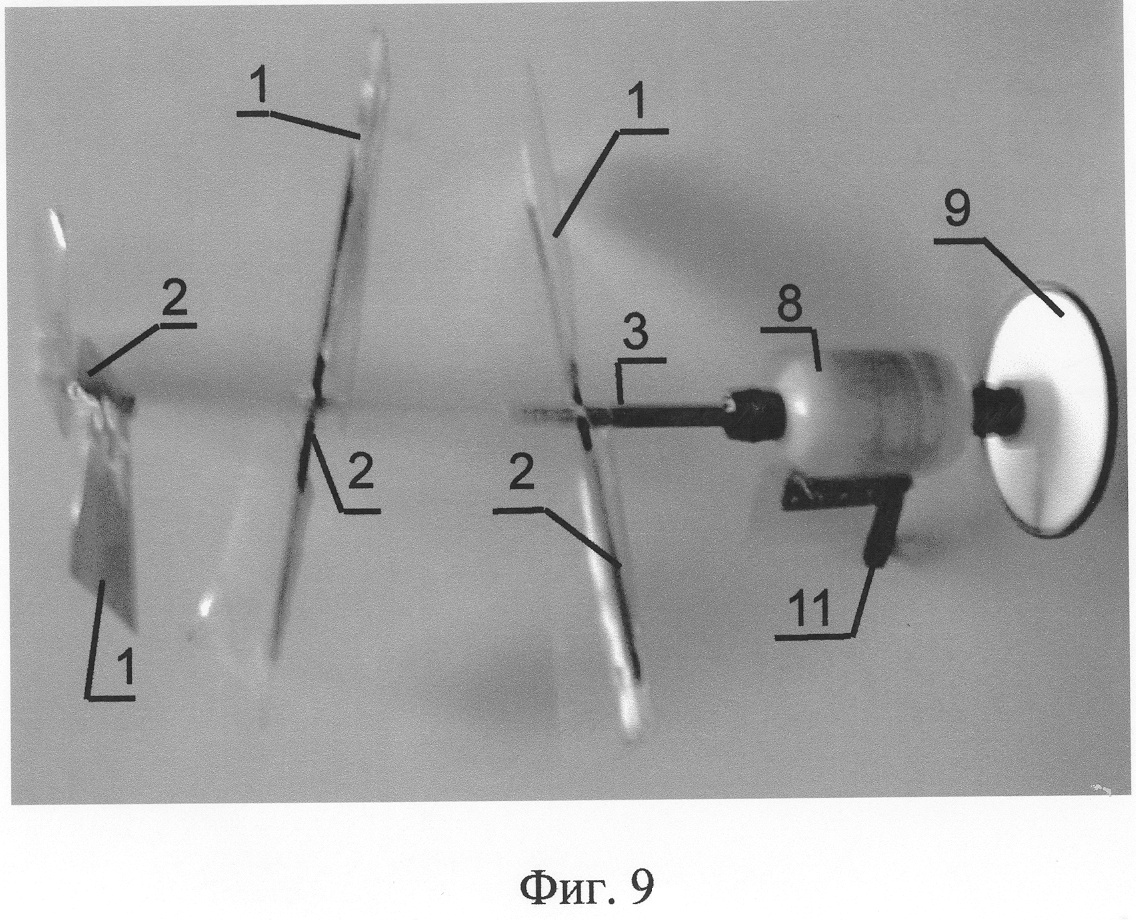
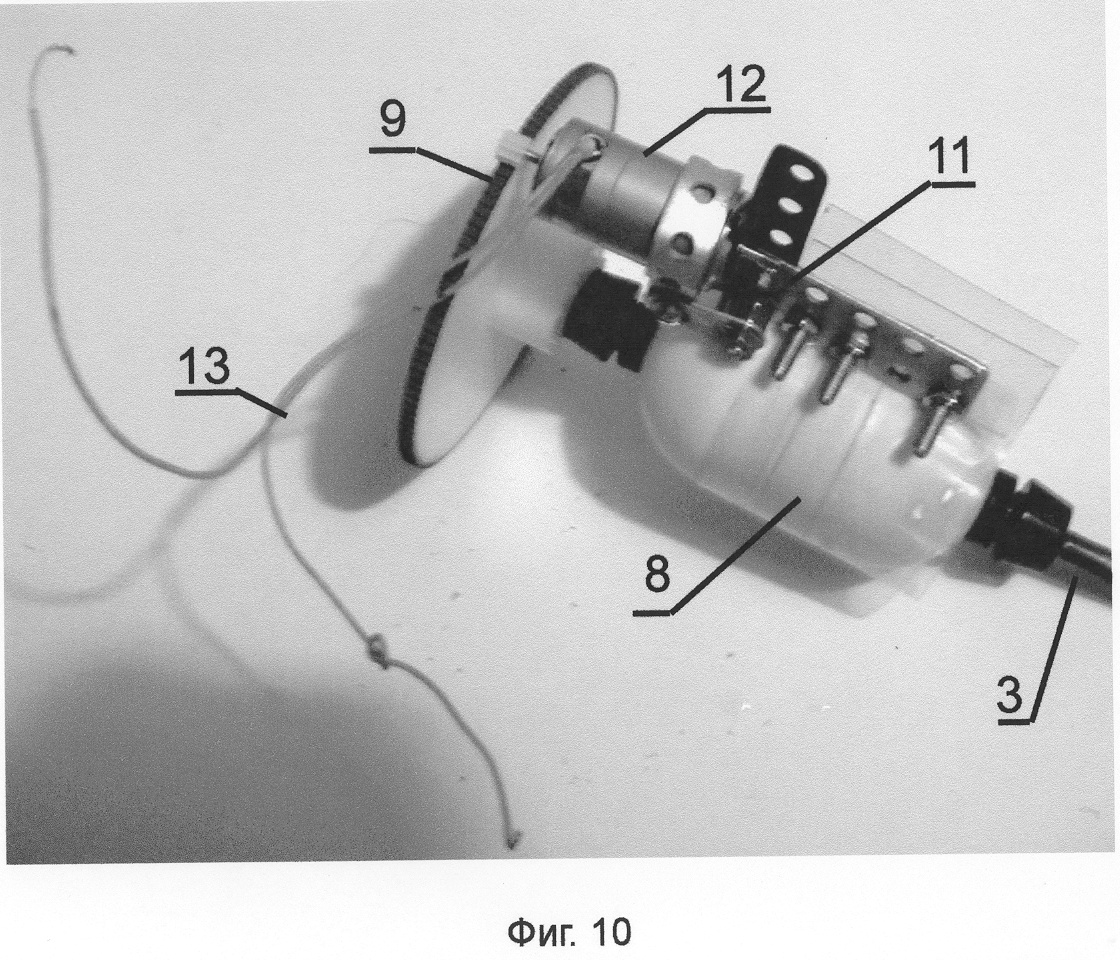
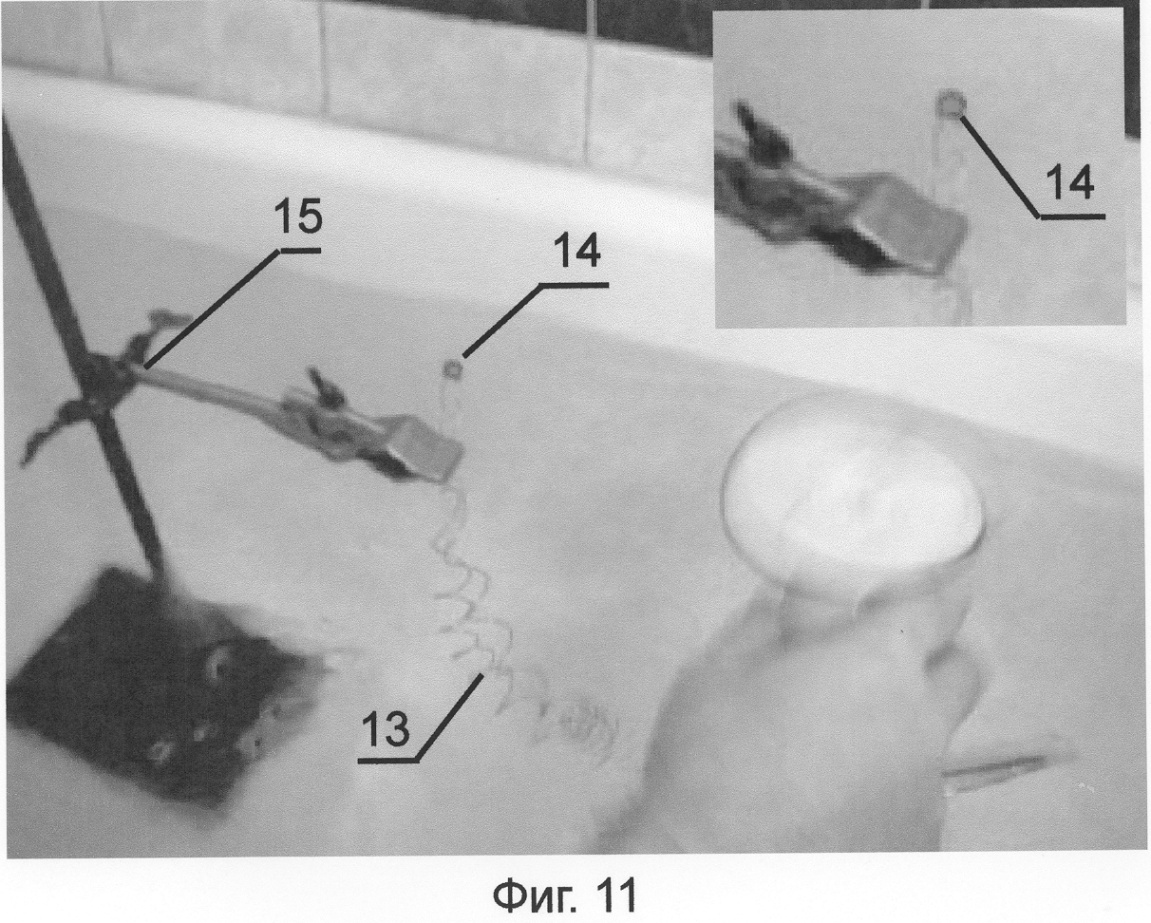
затопленное тело приобретает максимальное тангенциальное ускорение при заданной прикладываемой силе F и растет с ростом угла Этот же угол Отсюда следует, что упругость и гибкость пластины должны в процессе работы задавать такое значение угла Таким образом, оказывается, что размещение точки захвата пластины в соответствии с условием Необходимо обратить внимание на то, что точка, характеризующаяся условием В ходе экспериментов мы выявили, что гибкое упругое тело, захваченное в соответствии с правилом U=0.29 и находящееся под воздействием внешнего поперечного усилия, имеет наилучшие динамические показатели – максимальную силу тяги и минимальную потерю энергии при заданной величине воздействующей силы. Б. В наших исследованиях (Устюгина Г.П. “Полеты в воздушной и водной средах”. Газета “Физика”, №29, Изд. Дом “Первое сентября”. 2004) показано, что для маховых перьев птиц от воробья, синицы, городских вороны и голубя до чайки сокола и аиста характерным является равенство параметра U=0.29. Определялось оно измерениями взаимного расположения опахала и ствола пера. Причем ствол – это та часть пера, через которую осуществляется ударное маховое взаимодействие крыла с воздушной средой. Т.е. природные движители подтверждают справедливость правила U=0.29 как наилучшего для создания максимальной силы тяги у гибкого упругого аэродинамически обтекаемого плоского или близкого к тому объемного тела при воздействии на него поперечной силы с минимальной потерей энергии. В. Дальнейшие наши исследования заключались в том, чтобы применить результат пункта А (правило U=0.29) в варианте не одностороннего, а знакопеременного воздействия на тело с целью создания силы тяги вынуждающей тело двигаться не по криволинейной траектории с монотонным изменением направления движения, а в среднем поступательно в одном прямом направлении движения. Пусть (фиг.3) пластина будет закреплена тягой в виде не троса, а подвижного вдоль оси ОХ штока, через который осуществляется воздействие на пластину. Пусть также шток будет лишен возможности вращения в точке О системы координат XOY. А сама точка О пусть будет жестко связана, например, с плавсредством. Тогда (фиг.3), если реализуем внешнее воздействие в виде знакопеременной периодической силой, принуждающей точку захвата пластины к возвратно-поступательному движению, то следует ожидать возникновения результирующей силы тяги вперед. Эта сила тяги, приложенная к плавательному аппарату, приведет к его поступательному движению. При этом совершаемые вынужденные колебания точки захвата пластины будут являться движениями, поперечными по отношению к направлению движения плавсредства, что идеально соответствует машущему движению крыла птицы и хвоста рыбы. Одновременно это означает, что все средства возбуждения силы тяги в текучих средах, ориентированные на колебательное вееропобное движение движителя принципиально противоречат условию максимальной эффективности В таком случае не возникает необходимость задавать угол атаки движителя, поскольку движитель под воздействием внешних сил и условий сам, деформируясь, принимает энергетически выгодные форму и угол атаки. При работе движителя возникает вихревой поток (фиг.4), формирующийся последовательно сходящими с движителя замкнутыми вихрями типа тора. При этом направление вихревого потока (фиг.5) прямо противоположно направлению силы тяги. Поток формируется группой вихрей, образующих за движителем дорожку типа дорожки Кармана (Н.Е.Кочин, Н.В.Розе. Введение в теоретическую гидромеханику. Гос. технико-теоретическое издательство. М.-Л. 1932 г. 316 стр.). Здесь уместна аналогия с картиной возникновения подъемной силы крыла, движущегося в текучей среде с некоторой скоростью: при небольших углах атаки, примерно 5-10 градусов, у крыла возникает значительная подъемная сила. В нашем случае, прикладывая к пластине внешнюю силу так, что она играет роль подъемной силы, а деформации изгиба пластины приводят ее форму к форме крыла, мы создаем для внешней текучей среды условия, при которых возникающее вихревое движение среды должно быть таким, чтобы оно соответствовало подъемной силе. В этом смысле наш способ возбуждения движения среды является обратным способу возникновения подъемной силы крыла, находящегося в движущемся потоке. В этом случае исключено применение текучей среды в качестве упора, а потому исключен элемент движения “провал” движителя в среду, когда он, как гребковое средство, используется для того, чтобы опереться о текучую среду. Проблема неэффективной стадии “перекладывания движителя” в предлагаемом решении снимается полностью тем, что движитель в этой стадии распрямляется и возвращает потенциальную энергию изгиба в виде кинетической энергии поступательного движения плавательного аппарата вперед. В результате наших исследований движителя с помощью метода физического моделирования получено КПД Г. Применение нашего движителя в варианте лопасти для турбины дает устройство, изначально обладающее высоким КПД и знакопостоянным моментом вращения при знакопеременном направлении падения потока текучей среды на турбину. На фиг.6 показан элемент турбины, состоящий из двух лопастей 1, закрепленных на поперечине 2 в области, соответствующей правилу U=0.29 для лопасти. Поперечина 2 жестко соединена с валом 3, имеющим ось вращения 4. Так выглядит элемент турбины в состоянии покоя. Движение элемента вдоль оси вращения, т.е. в положительном направлении оси Z приводит к изгибным деформациям 5 лопастей, противоположное движение приводит к изгибным деформациям 6 лопастей. В обоих случаях элемент приобретает вращательное движение в направлении 7 – против часовой стрелки. Наращивание числа элементов турбины, последовательно расположенных на одном валу вращения, приводит к пропорциональному возрастанию мощности на валу вращения. Это позволяет наращивать необходимую мощность на одном валу вращения турбины без увеличения поперечных размеров колеса турбины. Изобретение поясняется иллюстрациями, на которых: Фиг.1. Вид сбоку (сечение) АВ пластины. XOY – декартова система координат; начальная точка О совпадает с точкой отбора троса OO’; О’ – точка захвата пластины тросом. С – геометрический центр пластины. S – траектория и направление движения пластины. F – вектор внешней силы, прикладываемой через трос к пластине. Фиг.2.а – вид сбоку (сечение) пластины АВ в движении; XOY – исходная система координат; X”O”Y” – мгновенная система координат; F – вектор внешней силы, N – вектор силы реакции среды; б – вид сбоку пластины АВ в начальном положении. Фиг.3. В системе координат XOY изображены две стадии движения гибкой пластины 1 (АВ) под действием внешней силы удара Fудар, прикладываемой к пластине через шток в точке 2: а) – сила удара направлена вверх; б – сила удара направлена вниз. Ось OY соответствует направлению движения пластины. Ось ОХ соответствует вертикальной прямой, вдоль которой шток осуществляет свое собственное возвратно-поступательное движение и движение точки захвата пластины. Векторами N показаны силы реакции среды. OO’ – линия горизонта; mm’ – хорда изогнутой пластины. Угол между отрезками прямых mm’ и OO’ соответствует углу атаки, порожденному деформацией пластины и силами удара и реакции среды. Отдельно вынесены параллелограммы сил Fудар и N, с помощью которых геометрически определяется вектор силы тяги R. Фиг.4. Схематично показано образование цепочки вихрей, образующейся за действующей пластиной, движущейся в среде со скоростью V. Цифрами 1, 2, 3 отмечены последовательные во времени и пространстве положения пластины при прохождении срединной линии поступательного движения движителя вперед. Замкнутые и незамкнутые кривые со стрелкой указывают направления движения частиц среды. Замкнутые кривые отражают отдельные вихри положительной и отрицательной интенсивности. Фиг.5. Приведена фотография вихревого следа за кормой действующей модели. След отразился в виде расширяющейся слева направо полосы возмущений на поверхности воды. Модель движется справа налево. Фиг.6. Диметрическая проекция вращательного элемента турбины. Лопасти 1 закреплены на поперечине 2 в области, соответствующей правилу U=0.29 для лопасти. Поперечина 2 жестко соединена с валом 3, имеющим ось вращения 4. Так выглядит элемент турбины в состоянии покоя. Движение элемента вдоль оси вращения, т.е. в положительном направлении оси Z, приводит к изгибным деформациям лопастей вида 5, противоположное движение приводит к изгибным деформациям лопастей вида 6. В обоих случаях элемент приобретает вращательное движение в направлении 7 – против часовой стрелки. Фиг.7. Фотография модели турбины с одним вращательным элементом, содержащая две симметрично расположенные прямоугольные лопасти 1, закрепленные на поперечине 2, жестко связанной с валом 3. На вал 3 насажены поплавок 8 с возможностью свободного вращения на валу и жестко большая шестерня 9. Фиг.8. Показаны проекции лопасти 1: а – вид сбоку, b – вид сверху. 10 – карман для жесткого крепления поперечины и лопасти. Фиг.9. Фотография турбины с тремя последовательно расположенными элементами на валу 3, смещенными один по отношению к другому на угол 120° и расстояние 0.1 м. Фиг.10. Фотография генератора 12, закрепленного на платформе 11, 13 – выводы проводов генератора. Фиг.11. Цветная фотография работы устройства: под действием вертикальных движений руки устройство, захваченное за поплавок, с турбиной, погруженной в воду, зажигает красный светодиод 14. Светодиод подсоединен к выводам генератора 13 и для удобства фотосъемки механически закреплен на штативе 15. Фиг.12. Черно-белый вариант фотографии фиг.11. Для демонстрации реализации предлагаемого технического решения воспользуемся методом физического моделирования. На фотографии фиг.7 приведена фотография модели турбины с одним вращательным элементом, содержащая две симметрично расположенные прямоугольные лопасти 1, закрепленные на поперечине 2, жестко связанной с валом 3. На вал 3 насажены поплавок 8 с возможностью свободного вращения и жестко большая шестерня 9. Лопасти выполнены из гибкой упругой полимерной пленки толщиной 0.00025 м так, что образуют прямоугольное тело с размерами 0.07×0.105 м2. В области, соответствующей правилу U=0.29, создан карман 10 для насаживания и крепления лопасти 1 на поперечине 2. На фиг.8 показаны проекции лопасти 1: а – вид сбоку, b – вид сверху. 10 – карман для жесткого крепления поперечины и лопасти. На фотографии фиг.9 приведена турбина с тремя последовательно расположенными элементами на валу, смещенными один по отношению к другому в плоскости вращения на угол 120° и расстояние 0.1 м вдоль вала вращения. 11 – площадка для крепления генератора 12 так, как это показано на фотографии фиг.10. Вращение вала 3 приводит в движение шестерню 9, которая, в свою очередь, через зубчатую передачу приводит во вращение малую шестерню, насаженную на вал генератора 12. Коэффициент передачи шестеренок 132:8. В результате вращения турбины на выводах генератора 13 возникает разность потенциалов. В качестве генератора используется электрический микродвигатель постоянного тока в обратном режиме. Двигатель постоянного тока ДПМ-25-Н1-03 рассчитан на напряжение питания 12 В и силу тока 0.3 А; угловая скорость – 6000 об/мин. В качестве индикатора используется светодиод марки GNL-1206URC красного цвета с рабочими напряжением 1.9 В и силой тока 70 мА, подключаемый к выводам генератора. Для имитации движения поплавка на волне используется ручной вариант: удерживая устройство за поплавок, производим вертикальные колебательные движения устройства так, что трехэлементная турбина все время находится в погруженном в воду состоянии. При этом возникает вращательное движение турбины, не зависящее от прямого или обратного направления движения устройства, возбуждающее в цепи генератор-светодиод электрический ток. На фотографиях фиг.11 в цветном и фиг.12 в черно-белом вариантах можно видеть работу устройства: под действием вертикальных движений руки устройство, захваченное за поплавок, с турбиной, погруженной в воду, зажигает красный светодиод 14. Светодиод подсоединен к выводам генератора 13 и для удобства фотосъемки механически закреплен на штативе 15. Динамометрические измерения и измерения напряжения и силы электрического тока дали следующие результаты (таблица 1). Максимальное значение прикладываемой силы выбрали равным 3.0 Н. Средняя прикладываемая сила 3.0×0.5 действовала в течение 0.5 с на интервале вертикального смещения устройства, равном 0.06 м, что определило среднюю скорость движения как 0.12 м/с и угловую 1.0 обор/с. Мощность, прикладываемая к устройству, равна 3.0×0.5×0.12=0.18 Вт. Измерение напряжения (2.0 В) и силы тока (0.5 А) на светодиоде, подключенном к выводам генератора, дало оценку выходной (полезной) мощности 2.0×0.5=0.1 Вт.
В результате КПД устройства оказалось равным 0.1/0.18=0.56=56%. Если учесть, что КПД генератора (обратного двигателя) может оцениваться в пределах от 60 до 80%, то для КПД турбины можно получить оценки – от 93 до 70%. Таким образом, предложенное техническое решение оказывается экономически существенно более выгодным, чем известные решения. Причина выигрыша заключается в том, что мы принципиально отходим от варианта использования текучей среды в качестве опоры для движителя, поскольку в этом случае движитель всегда будет “проваливаться” в среду, при этом его действенность будет заключаться в том, сколько текучей массы в единицу времени он успеет оттолкнуть от себя. Но это уже ближе к реактивному движению, причем в самом экономически невыгодном варианте. Наш же вариант заключается в том, что движитель создает условия для возникновения вихревых потоков, т.е. таких потоков, которые возникают при маховых движениях крыла у птицы или хвоста у рыбы, КПД которых примерно 95%. Предлагаемое техническое решение естественным образом допускает следующие расширения: – турбина может располагаться не только в водной, но и в воздушной среде; – на одном валу вращения возможно совместное применение и подводного и воздушного вариантов турбины.
Формула изобретения
1. Способ преобразования энергии морских волн в механическую энергию вращения турбины, заключающийся в том, что используется различие в состоянии поверхностных слоев моря, участвующих в волновом движении, и спокойных глубоких слоев воды, отличающийся тем, что турбина размещается в глубоких спокойных слоях воды, а поплавок, удерживающий вал вращения турбины, но не участвующий в его вращении, находясь на поверхности воды, участвует в ее волновом движении и передает посредством жесткой продольной связи с турбиной валом вращения свои смещения затопленной турбине, что приводит к ее смещениям относительно спокойных глубинных слоев воды, в результате которых турбина приходит во вращательное движение, при этом в силу гибкости лопастей турбины движение всегда осуществляется в одну сторону, причем в состоянии покоя хорды лопастей турбины располагаются в плоскости вращения турбины, а в активном состоянии лопасти изгибаются, как крыло птицы или хвост рыбы при маховом поперечном к направлению движения ударе, при этом захват лопасти и силовое воздействие от поплавка к лопасти осуществляется в соответствии с правилом U=0,29 в поперечном к плоскости движения лопастей направлении. 2. Турбина, содержащая лопасти, закрепленные на валу вращения, отличающаяся тем, что каждая лопасть представляет собой гибкое упругое плоское или близкое к плоскому объемное гидродинамически обтекаемое тело прямоугольной или близкой к маховому перу птицы формы, удерживаемое поперечиной, жестко связанной с валом вращения, и подвергающееся через поперечину силовому воздействию в области, определяемой правилом U=0,29 с возможностью осуществлять маховые движения под действием продольных движений вала вращения, причем лопасти попарно симметрично относительно вала вращения расположены на поперечине так, что образуют отдельный элемент турбины с знакоодинаковыми для обеих лопастей порождаемых ими моментов вращения, а количество n таких элементов, расположенных вдоль вала вращения турбины, определяет мощность турбины, возрастающую пропорционально числу элементов турбины, взаимное расположение которых по углу в плоскости вращения и расстоянию между элементами на валу вращения определяется из условия максимальной эффективности работы элементов.
РИСУНКИ
|
||||||||||||||||||||||||||
 точки захвата пластины тягой равно
точки захвата пластины тягой равно  – мгновенная длина троса;
– мгновенная длина троса; – расстояние от точки захвата пластины до мгновенной оси вращения О”;
– расстояние от точки захвата пластины до мгновенной оси вращения О”; -N’ – результирующая нормальная составляющая силы, действующей на пластину со стороны троса;
-N’ – результирующая нормальная составляющая силы, действующей на пластину со стороны троса; – тангенциальная составляющая силы действующей на пластину со стороны троса;
– тангенциальная составляющая силы действующей на пластину со стороны троса; – угол между мгновенным направлением движения пластины и осью Y;
– угол между мгновенным направлением движения пластины и осью Y; – мгновенное значение угла поворота мгновенного радиуса
– мгновенное значение угла поворота мгновенного радиуса  – угол отклонения троса от вертикальной оси X;
– угол отклонения троса от вертикальной оси X;












 76%. В аналогичных условиях винт-движитель обладает КПД
76%. В аналогичных условиях винт-движитель обладает КПД