Патент на изобретение №2279999
|
||||||||||||||||||||||||||
(54) СПОСОБ НАБЛЮДЕНИЯ ОБЪЕКТОВ С ДИСТАНЦИОННО ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА, ДИСТАНЦИОННО ПИЛОТИРУЕМЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ И ОБЗОРНАЯ КАДРОВАЯ СИСТЕМА ДИСТАНЦИОННО ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА
(57) Реферат:
Группа изобретений относится к беспилотным летательным аппаратам, предназначенным для наблюдения с воздуха за участками местности и объектами на ней. Наблюдение осуществляют кадровой обзорной системой. Изображение объекта передают с борта дистанционно пилотируемого летательного аппарата в текущем времени. В процессе наблюдения переключают камеры кадровой обзорной системы с различными полями зрения. Управляют летательным аппаратом по курсу, удерживая изображение объекта на вертикальной средней линии кадра. Камеры переключают при переходе изображения из поля зрения одной камеры в поле зрение последующей камеры. При попадании изображения в поле зрения камеры с наиболее узким полем зрения запоминают кадр. По положению изображения в запомненном кадре, координатам и углам ориентации летательного аппарата вычисляют координаты объекта. Летательный аппарат содержит в своем составе фюзеляж, крыло или иную несущую систему, силовую установку, систему управления с приемником командной радиолинии, кадровую обзорную систему, передатчик информационного сигнала. Обзорная кадровая система состоит из одной или более телевизионных и/или инфракрасных камер и размещена внутри фюзеляжа. Оптические оси камер зафиксированы в плоскости вертикальной симметрии летательного аппарата и ориентированы вниз и вперед под различными углами от 0 до 90 градусов к его вертикальной оси. Поля зрения камер имеют различную ширину. Камеры с более пологой ориентацией оптических осей имеют равную или большую ширину поля зрения, чем камеры с менее пологой ориентацией. Группа изобретений упрощает работу оператора летательного аппарата и позволяет снизить его массу, габариты и стоимость с одновременным улучшением аэродинамики. 3 н. и 2. з.п. ф-лы, 5 ил.
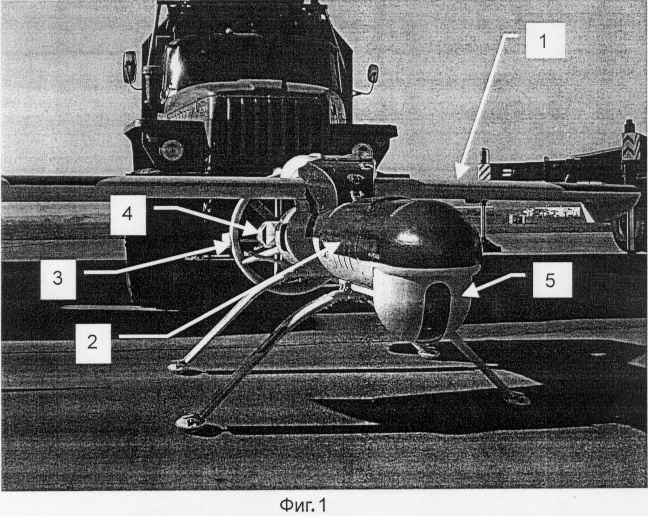
Заявляемое техническое решение относится к беспилотным летательным аппаратам, предназначенным для наблюдения с воздуха за отдельными участками местности и объектами на ней при решении природоохранных, пожароохранных и иных задач. Для наблюдения местности и расположенных на ней объектов широко применяются беспилотные летательные аппараты (БЛА или БПЛА), известные как дистанционно пилотируемые летательные аппараты (ДПЛА), описанные в книге А.С.Новоселова, В.Е.Болнокина, П.И.Чинаева и А.Н.Юрьева “Системы адаптивного управления летательными аппаратами”, изданной в Москве издательством “Машиностроение” в 1987 году, стр.36. Особенностью ДПЛА, выделяющей их из общего множества беспилотных летательных аппаратов, является возможность дистанционного управления в процессе полета летательным аппаратом и его оборудованием по командам оператора ДПЛА, находящегося на наземном пункте дистанционного управления. Известен способ дистанционного определения координат местоположения наземного объекта по патенту РФ №2182713 от 28.03.2000 г., МПК 7 G 01 S 13/06, опубликованному 20.05.2002 г. в бюллетене №14. Способ осуществляют с применением системы обзора, установленной на ДПЛА с возможностью поворота в вертикальной плоскости и стабилизированной по крену, позволяющей получать сигналы изображения участка местности, находящегося в поле зрения системы обзора. На ДПЛА установлены также приемник системы спутниковой навигации, магнитный компас, гировертикаль, измеритель угла отклонения системы обзора и барометрический высотомер. В полете ДПЛА на нем стабилизируют систему обзора по углу крена, с помощью системы обзора получают сигналы изображения участка местности, при этом в вычислитель предварительно вводят цифровую карту местности района, в котором запланирован полет ДПЛА, далее на наземном пункте значения географических широты и долготы местоположения наземного объекта. Общими признаками способа дистанционного определения координат местоположения наземного объекта и заявляемого технического решения являются наличие системы обзора, позволяющей получать сигналы изображения участка местности, находящегося в поле зрения системы обзора. Недостатком способа дистанционного определения координат местоположения наземного объекта является необходимость гиростабилизации системы обзора, усложняющей и утяжеляющей ДПЛА. Известен автономный привязной летательный аппарат для дистанционного наблюдения за местностью по патенту РФ №2159199 от 02.11.1998 г., МПК-7 В 64 В 1/50; B 64 D 47/00; В 64 С 31/06, опубликованному 20.11.2000 г. в бюллетене №32. Автономный привязной летательный аппарат для дистанционного наблюдения за местностью содержит корпус, крыло, энергоузел с быстроходной ветроэнергетической установкой, контейнер с аппаратурой для наблюдения за местностью. Устройство-прототип снабжено силовой системой для крепления тросовой разводки. Изобретение-прототип направлено на повышение надежности получения данных об обстановке на просматриваемой территории. Контейнер с аппаратурой (обзорная система) подвешен в нижней части корпуса и снабжен стабилизирующими гироскопами, которые предназначены для парирования колебаний и вращения корпуса как твердого тела относительно скоростной системы координат. Перечень чертежей прототипа включает, в частности, схему расположения контейнера с аппаратурой, схему наблюдения за обстановкой, схему установки датчика обзора поверхности. Общими признаками заявляемого технического решения и автономного привязного летательного аппарата для дистанционного наблюдения за местностью являются: компоновка летательного аппарата и обзорной системы; расположение обзорной системы в нижней части корпуса. Отличием заявляемого технического решения является расположение обзорной системы в нижней части внутри фюзеляжа, в то время как в прототипе контейнер с аппаратурой является подвесным, прикрепленным к силовому кольцу, расположенному в нижней части корпуса. Кроме того, несмотря на сходство технических решений, автономный привязной летательный аппарат для дистанционного наблюдения за местностью является практически стационарным и способен наблюдать за конкретным участком местности, что и не позволило выбрать его в качестве прототипа. Прототипом заявляемого технического решения и типичным представителем ДПЛА является разработанный в СССР в 80-х годах XX века ДПЛА “Пчела-1” в телевизионном варианте, описанный, например, в статье Ю.И.Янкевича в журнале “Крылья Родины”, №3, 2002 г. и представленный на фиг.1. ДПЛА “Пчела-1” содержит в своем составе следующие важные для сути предлагаемого изобретения составные части: 1 – крыло (для ДПЛА вертолетной схемы вместо крыла используется несущий винт); 2 – фюзеляж; 3 – оперение (при использовании аэродинамических схем ДПЛА типа “утка” или “бесхвостка” оперение может отсутствовать); 4 – силовую установку; 5 – кадровую обзорную систему. Позиции 1, 2, 3 образуют планер ДПЛА. Общие признаки данного аналога и заявляемого технического решения: наличие крыла и фюзеляжа, а также наличие кадровой обзорной системы. Кадровая обзорная система содержит в своем составе одну или несколько телевизионных (ТВ) и/или инфракрасных (ИК) камер. Кроме того, ДПЛА в своем составе содержит также систему управления с приемником командной радиолинии и передатчик информационного (ТВ или ИК) сигнала от кадровой обзорной системы (на фиг.1 не видны). ДПЛА типа “Пчела-1” для наблюдения за объектами обладают возможностью передавать изображение местности от кадровой обзорной системы на пункт управления. Для этого служит передатчик информационного (ТВ или ИК) сигнала. Оператор пункта управления имеет возможность передавать команды, которые ДПЛА принимает, используя приемник командной радиолинии. Система управления ДПЛА выполняет команды оператора как по управлению самим летательным аппаратом, так и по управлению кадровой обзорной системой и другим бортовым оборудованием ДПЛА. Основным противоречием при применении ДПЛА типа “Пчела” для наблюдения объектов на местности является противоречие между площадью одновременно обозреваемой местности и возможностью обнаружения и распознавания малоразмерных объектов. Это связано с тем, что во всем кадре, независимо от ширины поля зрения, отображается определенное количество независимых элементов разрешения (например, для стандартного ТВ кадра примерно 400×300=120000 элементов). Для обнаружения и распознавания объекта необходимо, чтобы на изображении объекта размещалось не менее определенного количества элементов разрешения. Считается, что для обнаружения малоразмерного объекта необходимо, чтобы на его изображении размещалось от 3 до 4 элементов разрешения, а для распознавания объекта – от 5 до 15 элементов разрешения. Эти цифры могут варьироваться в зависимости от типа обнаруживаемого и распознаваемого объекта. При широком поле зрения площадь обозреваемой местности велика, но и геометрический размер каждого элемента разрешения велик, поэтому количество элементов разрешения, размещающихся на малоразмерном объекте, соответственно мало. При узком поле зрения количество элементов разрешения на малоразмерном объекте становится больше, однако уменьшается площадь одновременно обозреваемой местности, и снижается вероятность попадания объекта в поле зрения. Это противоречие обычно разрешается использованием в кадровой обзорной системе ДПЛА ТВ (ИК) камер с изменяемым полем зрения и поворотного устройства. Изменяемая ширина поля зрения кадровой обзорной системы достигается использованием объектива с переменным фокусным расстоянием или использованием нескольких переключаемых ТВ (ИК) камер (объективов) с различными полями зрения и коллинеарными оптическим осями [А.С.Новоселов, В.Е.Болнокин, П.И.Чинаев и А.Н.Юрьев. “Системы адаптивного управления летательными аппаратами”, Москва, “Машиностроение”, 1987 год, стр.38]. Изменяемая ширина поля зрения позволяет после первичного обнаружения объекта на широком поле зрения распознать объект при его наблюдении на узком поле зрения. Поворотное устройство позволяет изменять ориентацию оптической оси обзорной системы и сопровождать объект, удерживая его на оптической оси обзорной системы (в центре кадра) в процессе наблюдения. Описанный в книге А.С.Новоселова и др. способ наблюдения объектов с помощью ДПЛА (прототип) заключается в том, что [А.С.Новоселов, В.Е.Болнокин, П.И.Чинаев и А.Н.Юрьев. “Системы адаптивного управления летательными аппаратами”, Москва, “Машиностроение”, 1987 год, стр.66]: “оператор целевого оборудования наблюдает изображение, передаваемое с борта ДПЛА в текущем времени, осуществляет поиск, обнаружение и распознавание целей, при этом он имеет возможность управлять линией визирования телевизионного датчика по азимуту и углу места и переключать объективы датчика, изменяя его фокусное расстояние”. На практике способ реализуют следующим образом: ДПЛА направляют по маршруту, на котором ожидается присутствие интересующих объектов. При этом устанавливают широкое поле зрения обзорной кадровой системы, а ее оптическую ось устанавливают в плоскости вертикальной симметрии ДПЛА и наклоняют вниз на такой угол, чтобы движение изображения местности по экрану позволяло оператору замечать подозрительные на наличие объекта точки. При появлении на изображении точки, подозрительной на наличие объекта, наводят оптическую ось кадровой обзорной системы на эту точку, помещая тем самым ее изображение в центр кадра. Далее, управляя положением оптической оси кадровой обзорной системы (в том числе возможно применение автоматического сопровождения объекта), удерживают подозрительную точку в центре кадра и сужают поле зрения кадровой обзорной системы, укрупняя изображение. При достаточно узком поле зрения обнаруживают объект, то есть принимают решение о том, что подозрительная точка действительно является интересующим объектом, а не неоднородностью местности. После обнаружения объекта, продолжая сужать поле зрения и укрупняя изображение объекта, распознают объект (например, “дом”, “автомобиль”, “человек”). Удерживая изображение объекта в центре кадра, подают команду на измерение координат объекта. Координаты объекта измеряют путем их вычисления на ЭВМ с использованием координат ДПЛА, углов ориентации ДПЛА и углов ориентации оптической оси кадровой обзорной системы относительно связанной системы координат ДПЛА на момент подачи команды на измерение координат. Описанный способ наблюдения местности и объектов на ней реализуется с использованием ДПЛА, подобных ДПЛА “Пчела-1”. Недостатками способа и ДПЛА для его реализации являются: – сложность работы оператора ДПЛА, которому затруднительно ориентироваться в пространстве при одновременном движении ДПЛА, повороте оптической оси обзорной системы и изменении ширины поля зрения обзорной системы; – сложность, громоздкость и высокая стоимость кадровой обзорной системы с поворотным по двум осям устройством, что приводит к общему увеличению массы, габаритов и стоимости всего ДПЛА, а также к ухудшению аэродинамики ДПЛА из-за выступающего обтекателя кадровой обзорной системы; – усиление погрешности измерения координат наблюдаемых объектов, связанное с выносом линии визирования объекта в сторону от ДПЛА. Первые два недостатка очевидны. Третий недостаток иллюстрируется фиг.2, на которой изображено визирование объекта оптической осью кадровой обзорной системы при измерении координат объекта и явление усиления погрешности. На фиг.2 показана геометрия обзора местности ДПЛА с кадровой обзорной системой в вертикальной плоскости. На круговой выноске в правом верхнем углу рисунка укрупненно показана геометрия вблизи точки пересечения оптической оси с поверхностью земли. Треугольник АВС образован поверхностью земли, истинным положением оптической оси и кажущимся положением оптической оси. Объект находится в точке А. Кажущееся положение оптической оси – это то положение оптической оси, которое соответствует измеренной ориентации ДПЛА относительно земной системы координат и измеренной ориентации оптической оси относительно связанной системы координат ДПЛА. Поскольку все эти измерения сопряжены с погрешностями, то кажущееся положение оптической оси отличается от ее истинного положения. Полагая угол наклона оптической оси к горизонту равным Если непосредственное измерение дальности Д в составе проводимых измерений отсутствует, то дальность вычисляют через высоту Н полета ДПЛА:
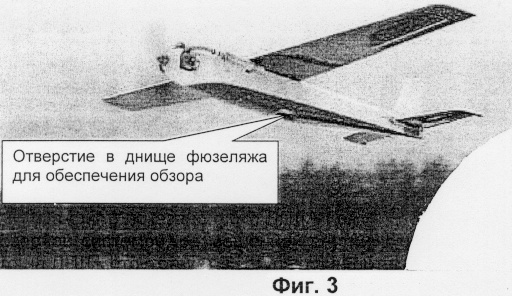
Из приведенных выражений (1) и (1а) видно, что линейные погрешности АВ и АС пропорциональны угловой погрешности Рассмотрим влияние погрешности измерения высоты полета ДПЛА при отсутствии непосредственного измерения дальности. Погрешность измерения высоты Из проведенного рассмотрения следует очевидный вывод: для уменьшения общей погрешности измерения координат цели необходимо, чтобы угол ЦЕЛЯМИ ИЗОБРЕТЕНИЯ являются упрощение работы оператора ДПЛА; снижение массы, габаритов и стоимости ДПЛА; улучшение аэродинамики ДПЛА; уменьшение погрешности измерения координат целей. Перечисленные цели достигаются отказом от управления положением оптической оси обзорной системы и шириной поля зрения кадровой обзорной системы, а использованием взамен этого поступательного движения ДПЛА и возможности управления курсом ДПЛА при наблюдении цели. Одновременно устраняются отмеченные недостатки способа-прототипа и ДПЛА-прототипа. Реализация предлагаемого способа тесно связана с конструкцией ДПЛА и кадровой обзорной системы, сущность которых также изложена в настоящем описании. Сущность заявляемого технического решения следующая: способ наблюдения объектов с дистанционно пилотируемого летательного аппарата заключается в том, что наблюдают изображение, передаваемое с борта дистанционно-пилотируемого летательного аппарата в текущем времени, осуществляют поиск, обнаружение и распознавание объектов, в процессе наблюдения переключают кадровые телевизионные (инфракрасные) камеры с различными полями зрения, причем наблюдение осуществляют с помощью кадровой обзорной системы, состоящей из нескольких камер с неколлинеарными, расположенными в вертикальной плоскости оптическими осями, управляют летательным аппаратом по курсу, удерживая изображение объекта на вертикальной средней линии кадра, при переходе изображения объекта из поля зрения одной камеры в поле зрение последующей камеры осуществляют переключение камер, причем при попадании изображения объекта в поле зрения камеры с наиболее узким полем зрения запоминают кадр, после чего по положению изображения объекта в запомненном кадре, координатам и углам ориентации дистанционно-пилотируемого летательного аппарата вычисляют координаты объекта. Дистанционно пилотируемый летательный аппарат содержит в своем составе фюзеляж, крыло или иную несущую систему, силовую установку, систему управления с приемником командной радиолинии, кадровую обзорную систему, передатчик информационного сигнала, при этом с целью упрощения работы оператора, снижения массы, габаритов и стоимости летательного аппарата, улучшения аэродинамики и уменьшения погрешности измерения координат объектов, а также с целью защиты от внешних воздействий обзорная кадровая система состоит из одной или нескольких ТВ и/или ИК камер и размещена внутри фюзеляжа, при этом в днище фюзеляжа вырезано отверстие, обеспечивающее кадровой обзорной системе обзор местности. Кадровая обзорная система дистанционно пилотируемого летательного аппарата выполнена таким образом, что с целью увеличения времени наблюдения объекта, улучшения условий распознавания объектов и снижения погрешности измерения координат объектов оптические оси камер обзорной кадровой системы жестко зафиксированы в плоскости вертикальной симметрии летательного аппарата и ориентированы вниз и вперед под различными углами от 0 до 90 градусов к вертикальной оси летательного аппарата, а поля зрения камер имеют различную ширину, причем камеры с более пологой ориентацией оптических осей имеют равную или большую ширину поля зрения, чем камеры с менее пологой ориентацией. Кадровая обзорная система дистанционно пилотируемого летательного аппарата может отличаться тем, что с целью стабилизации изображения по крену обзорная кадровая система подвешена на оси, параллельной продольной оси летательного аппарата, и снабжена приводом для поворота вокруг этой оси по командам системы управления. Кадровая обзорная система дистанционно пилотируемого летательного аппарата может отличаться тем, что с целью защиты от внешних воздействий обзорная кадровая система оборудована жестко связанной с ней крышкой, которая при повороте кадровой обзорной системы вокруг оси подвеса на достаточно большой угол, превосходящий рабочие углы, закрывает отверстие днища фюзеляжа, обеспечивающее кадровой обзорной системе обзор местности. Общими признаками способа-прототипа и предлагаемого способа являются следующие действия: наблюдают изображение, передаваемое с борта ДПЛА в текущем времени; осуществляют поиск, обнаружение и распознавание объектов; в процессе наблюдения переключают кадровые телевизионные или инфракрасные камеры с различной шириной поля зрения. Наиболее существенным отличием предлагаемого способа наблюдения от прототипа является то, что вместо того, чтобы управлять положением линии визирования обзорной кадровой системы, управляют курсом летательного аппарата, удерживая изображение объекта на вертикальной средней линии кадра. Укрупнение изображения объекта при этом достигается за счет двух факторов: естественного приближения ДПЛА к объекту в процессе полета; дискретного изменения угловой ширины поля зрения камеры за счет того, что при выходе изображения из поля зрения камеры через нижнюю границу кадра переключаются на следующую камеру, оптическая ось которой расположена более круто (под большим углом к горизонту), а поле зрения уже. При попадании изображения объекта в поле зрения камеры с наиболее узким полем зрения и наиболее круто расположенной оптической осью запоминают кадр, после чего по положению изображения объекта в запомненном кадре, координатам и углам ориентации ДПЛА вычисляют координаты цели. Общими признаками предлагаемого ДПЛА и ДПЛА-прототипа (“Пчела-1”) являются наличие в составе ДПЛА: фюзеляжа; крыла (или иной несущей системы, например, воздушного винта); силовой установки; системы управления с приемником командной радиолинии; кадровой обзорной системы; передатчика информационного сигнала. Существенным отличием является размещение кадровой обзорной системы из одной или нескольких камер внутри фюзеляжа, при этом в днище фюзеляжа вырезано отверстие, обеспечивающее кадровой обзорной системе обзор местности. На фиг.3 показано фото ДПЛА ГрАНТ, оборудованного кадровой обзорной системой, размещенной внутри фюзеляжа. На фото видно, что на ДПЛА отсутствует выступающий обтекатель кадровой обзорной системы, характерный для ДПЛА-прототипа “Пчела-1” (фиг.1). Размещение кадровой обзорной системы внутри фюзеляжа (или хотя бы внутри обводов фюзеляжа) существенно улучшает аэродинамику летательного аппарата. Причиной, почему такое простое конструктивное решение не применялось на ДПЛА с кадровыми обзорными системами раньше, является приверженность конструкторов ДПЛА традиционному способу наблюдения (прототипу), обеспечивающему обзор местности без изменения направления полета ДПЛА. Вместе с тем, необходимо отметить, что для ДПЛА со строчными системами ТВ и ИК системами такое конструктивное решение вполне обычно. Применение предлагаемого способа наблюдения при размещении кадровой обзорной системы внутри фюзеляжа становится возможным при использовании кадровой обзорной системы, предлагаемой для реализации предлагаемого способа. При этом сохраняется основное достоинство кадровой обзорной системы – возможность наблюдения объекта и прилегающего участка местности в текущем времени. Общими признаками предлагаемой кадровой обзорной системы и кадровой обзорной системы-прототипа (обзорной системы ДПЛА “Пчела-1”) являются наличие в составе системы одной или нескольких ТВ (ИК) камер и возможность изменения ширины текущего поля зрения путем переключения камер. Существенными отличиями предлагаемой кадровой обзорной системы являются: жесткое закрепление камер с размещением их оптических осей в плоскости вертикальной симметрии ДПЛА в секторе углов от 0 до 90 градусов по отношению к вертикальной оси летательного аппарата.; неколлинеарность оптических осей ТВ камер; различная ширина полей зрения камер, причем камеры с более пологой ориентацией имеют равную или большую ширину поля зрения, чем камеры с менее пологой ориентацией. Пример размещения оптических осей и углов (полей) зрения трех камер, обозначенных римскими цифрами I, II, III, показан на чертежах фиг.4 и 5. Предложенная кадровая обзорная система обладает недостатком: при управлении ДПЛА по курсу, являющимся неотъемлемым элементом предложенного способа наблюдения объектов, возникает крен. При жестком закреплении камер кадровой обзорной системы крен вызывает смещение изображения. Чтобы избежать этого нежелательного явления необходима стабилизация кадровой обзорной системы. С этой целью кадровую обзорную систему, состоящую из трех жестко связанных в единую конструкцию камер, как описано выше, необходимо подвесить на оси, параллельной продольной оси летательного аппарата, и снабдить приводом, позволяющим поворачивать кадровую обзорную систему вокруг оси подвеса по командам системы управления ДПЛА. На основании информации о текущем крене ДПЛА система управления может поворачивать кадровую обзорную систему таким образом, чтобы скомпенсировать крен ДПЛА. При стабилизации крена повороты кадровой обзорной системы сравнительно невелики и составляют не более 30 градусов вправо и влево от плоскости вертикальной симметрии ДПЛА. Подвес кадровой обзорной системы на оси, параллельной продольной оси летательного аппарата, позволяет реализовать перевод кадровой обзорной системы в нерабочее (маршевое) положение, если повернуть кадровую обзорную систему на достаточно большой угол, например, 90 градусов. При этом входные зрачки камер окажутся убранными вбок и защищены боковой поверхностью фюзеляжа. Для закрытия обзорного отверстия в днище фюзеляжа на кадровой обзорной системе жестко закреплена крышка, которая при повороте кадровой обзорной системы на достаточно большой угол закрывает обзорное отверстие. Это обеспечивает защиту кадровой обзорной системы от внешних воздействий при посадке ДПЛА. Закрытие обзорного отверстия крышкой также положительно сказывается на аэродинамике ДПЛА при полете по маршруту. Покажем, что поставленные цели в заявляемом техническом решении достигнуты. 1. Цель “упрощение работы оператора ДПЛА”. Работа оператора упрощена, так как оператору необходимо только рассматривать движущееся сверху вниз по экрану изображение и периодически отмечать положение подозрительной точки (цели) на изображении, например, “мышью” или иным указателем. Выдача команд на довороты ДПЛА по курсу, на переключение камер и на запоминание кадра, требующихся для реализации способа, допускает простую программную реализацию на ЭВМ и не требует от оператора никаких специальных действий. 2. Цели: “снижение массы, габаритов и стоимости ДПЛА”. ДПЛА, реализующий описанный способ, показан на фиг.3. Он гораздо проще, меньше, легче и дешевле, чем ДПЛА с кадровыми обзорными системами с изменяемым полем зрения и поворотным устройством, необходимыми для реализации способа-прототипа. Этот ДПЛА имеет кадровую обзорную систему из трех ТВ камер, поля зрения и оптические оси которых размещены в соответствии с примером, приведенным на фиг.4 и 5. Стартовая масса ДПЛА составляет 20 кг, тогда как стартовая масса ДПЛА “Пчела-1” существенно превышает 100 кг (около 140 кг) при примерно тех же основных летно-технических характеристиках (дальность, скорость, продолжительность полета). Из опыта известно, что стоимость летной техники примерно пропорциональна ее массе. 3. Цель: “улучшение аэродинамики ДПЛА” достигается, прежде всего, за счет уменьшения площади поперечного сечения ДПЛА, которое происходит благодаря исключению выступающего обтекателя кадровой обзорной системы. Улучшение аэродинамики происходит также благодаря исчезновению завихрений воздуха вокруг обтекателя, присущих ДПЛА-прототипу. Кроме того, кадровая обзорная система ДПЛА на фото фиг.3 позволила разместить силовую установку с воздушным винтом на наиболее выгодном месте – в носу ДПЛА. Это позволяет более эффективно использовать воздушный винт. Дополнительное улучшение аэродинамики на маршруте полета к цели достигается закрытием обзорного отверстия крышкой при повороте обзорной кадровой системы на достаточно большой угол при переводе ее в маршрутное положение. Аэродинамическая форма ДПЛА ГрАНТ (фото фиг.3) по сравнению с ДПЛА “Пчела-1” (фото фиг.1) очевидно более благородна. 4. Цель: “уменьшение погрешности измерения координат целей”. Предложенный способ наблюдения целей предполагает измерение координат цели при ее наблюдении через ТВ (ИК) камеру с наиболее узким полем зрения и наиболее круто ориентированной оптической осью. В идеале, при пролете ДПЛА точно над целью линия визирования цели будет расположена под углом 90 градусов к горизонту. Полагая угол Отклонение линии визирования цели от перпендикуляра при нулевом крене ДПЛА или стабилизации кадровой обзорной системы по крену не превысит половины угловой диагонали поля зрения камеры (как правило, не более 6 градусов). Полагая
Коэффициенты усиления линейной ошибки на местности равны:
Отсюда видно, что явление усиления погрешностей измерения углов ориентации и высоты полета ДПЛА в предложенном способе практически отсутствует. В то же время, при характерном для способа-прототипа значении
Коэффициенты усиления линейной ошибки на местности при этом равны:
Таким образом, предложенный способ позволяет существенно уменьшить погрешность измерения координат цели, связанную с погрешностями измерения углов ориентации и высоты полета ДПЛА. Из вышеизложенного можно сделать вывод о соответствии заявляемого технического решения критериям патентоспособности: новизна, изобретательский уровень и промышленная применимость.
Формула изобретения
1. Способ наблюдения объектов с дистанционно пилотируемого летательного аппарата, заключающийся в том, что наблюдение осуществляют с помощью кадровой обзорной системы, состоящей из нескольких телевизионных и/или инфракрасных камер, наблюдаемое изображение передают с борта дистанционно пилотируемого летательного аппарата в текущем времени, осуществляют поиск, обнаружение и распознавание объектов, в процессе наблюдения переключают камеры кадровой обзорной системы с различными полями зрения, отличающийся тем, что камеры кадровой обзорной системы используют с неколлинеарными, расположенными в вертикальной плоскости оптическими осями, управляют летательным аппаратом по курсу, удерживая изображение объекта на вертикальной средней линии кадра, переключение камер осуществляют при переходе изображения объекта из поля зрения одной камеры в поле зрение последующей камеры, причем при попадании изображения объекта в поле зрения камеры с наиболее узким полем зрения запоминают кадр, после чего по положению изображения объекта в запомненном кадре, координатам и углам ориентации дистанционно пилотируемого летательного аппарата вычисляют координаты объекта. 2. Дистанционно пилотируемый летательный аппарат, содержащий в своем составе фюзеляж, крыло или иную несущую систему, силовую установку, систему управления с приемником командной радиолинии, кадровую обзорную систему, передатчик информационного сигнала, отличающийся тем, что обзорная кадровая система состоит из одной или более телевизионных и/или инфракрасных камер и размещена внутри фюзеляжа, при этом в днище фюзеляжа вырезано отверстие, обеспечивающее кадровой обзорной системе обзор местности. 3. Кадровая обзорная система дистанционно пилотируемого летательного аппарата, содержащая телевизионные и/или инфракрасные камеры, отличающаяся тем, что оптические оси камер обзорной кадровой системы жестко зафиксированы в плоскости вертикальной симметрии летательного аппарата и ориентированы вниз и вперед под различными углами от 0 до 90° к вертикальной оси летательного аппарата, а поля зрения камер имеют различную ширину, причем камеры с более пологой ориентацией оптических осей имеют равную или большую ширину поля зрения, чем камеры с менее пологой ориентацией. 4. Кадровая обзорная система дистанционно пилотируемого летательного аппарата по п.3, отличающаяся тем, что обзорная кадровая система подвешена на оси, параллельной продольной оси летательного аппарата, и снабжена приводом для поворота вокруг этой оси по командам системы управления. 5. Кадровая обзорная система дистанционно пилотируемого летательного аппарата по п.4, отличающаяся тем, что обзорная кадровая система оборудована жестко связанной с ней крышкой, которая при повороте кадровой обзорной системы вокруг оси подвеса на угол, превосходящий рабочие углы, закрывает отверстие днища фюзеляжа, обеспечивающее кадровой обзорной системе обзор местности.
РИСУНКИ
TK4A – Поправки к публикациям сведений об изобретениях в бюллетенях “Изобретения (заявки и патенты)” и “Изобретения. Полезные модели”
Напечатано: (73) Общество с ограниченной ответственностью «Новик-XXI век» (RU)
Следует читать: (73) Общество с ограниченной ответственностью Научно-производственный конструкторский центр «Новик-XXI век» (RU)
Номер и год публикации бюллетеня: 20-2006
Код раздела: FG4A
Извещение опубликовано: 27.09.2008 БИ: 27/2008
|
||||||||||||||||||||||||||
 и измеренным с погрешностью
и измеренным с погрешностью  , а дальность от ДПЛА до объекта равной Д, для прямоугольного треугольника
, а дальность от ДПЛА до объекта равной Д, для прямоугольного треугольника